 靈動微MM32F5270定時器單脈沖輸出
靈動微MM32F5270定時器單脈沖輸出
1
單脈沖輸出
定時器單脈沖輸出是比較輸出應用中的一種模式,所謂的單脈沖就是通過配置定時器使其在一個可控延時后,產生一個脈寬可控的脈沖。
單脈沖模式(One Pulse Mode)下,計數器響應一個激勵,產生一個脈寬可調的脈沖。配置 TIMx_CR1 寄存器的OPM=1,選擇單脈沖模式,觸發信號有效沿或配置 CEN=1 都可以啟動計數器,直到下個更新事件發生或配置 CEN=0 時,計數器停止計數。
產生脈沖的必要條件是比較值與計數器的初始值不同,所以在計數器啟動之前的必要配置如下:
遞增計數方式:計數器 CNT < CCRx ≤ ARR。
遞減計數方式:計數器 CNT > CCRx。

圖 1 單脈沖模式
例如,在 TI2 檢測到上升沿,延遲 tDELAY 之后,在 OC2 上產生一個長度為 tPULSE 的正脈沖。配置 TI2FP2 作為觸發源:
1
配置 TIMx_CCMR1 寄存器中的 CC2S = 01,將 TI2FP2 映射到 TI2。
1
配置 TIMx_CCER 寄存器中的 CC2P = 0,檢測 TI2FP2 的上升沿。
3
配置 TIMx_SMCR 寄存器中的 TS = 110, TI2FP2 作為從模式控制器的觸發(TRGI)。
4
配置 TIMx_SMCR 寄存器中的 SMS = 110,選擇觸發模式, TI2FP2 使能計數器工作。
OPM 的波形由 TIMx_ARR 和 TIMx_CCR1 決定(要考慮時鐘頻率和計數器預分頻器):由 TIMx_CCR1寄存器的值和 CNT 初始值決定觸發信號與單脈沖開始之間的延遲 tDELAY, TIMx_ARR - TIMx_CCR1 的值為脈沖的寬度 tPULSE。
下面是一個產生負脈沖的例子,即發生比較匹配時產生從 1 到 0 的波形,計數器達到預裝載值時產生一個從 0 到 1 的波形:
1
配置 TIMx_CCMR1 寄存器 OC1M = 111,選擇 PWM 模式 2。
2
配置 TIMx_CCER 寄存器 CC1P = 1,輸出低電平有效。
1
配置 TIMx_CCMR1 中 OC1PE = 1 和 TIMx_CR1 寄存器中 ARPE=1,使能預裝載寄存器。
4
配置 TIMx_CCR1 寄存器和 TIMx_ARR 寄存器。
1
配置 TIMx_EGR 寄存器 UG=1 產生一個更新事件。
6
等待在 TI2 上的一個外部觸發事件。
此例中, TIMx_CR1 寄存器中的 DIR=0、 CMS=0、 OPM= 1,在下一個更新事件(當計數器從自動裝載值返回到 0)時停止計數。
2
實驗
2.1 實驗說明
配置TIM1_CH1單脈沖輸出,TIM1_CH2輸入捕獲,TIM1從模式選擇觸發模式,TIM3_CH1輸出PWM,觸發TIM1計數器開始計數。當TIM1_CH2捕捉到有效信號時,TIM1計數器開始計數,按照配置好的脈寬,TIM1_CH1輸出一個脈沖信號。
2.2 程序編寫
程序部分參考MM32提供的例程,相關代碼在此基礎上更改。
2.21 GPIO初始化
配置PA8作為TIM1_CH1、PA9作為TIM1_CH2
voidTIM1_GPIO_Init(void) { GPIO_InitTypeDefGPIO_InitStruct; RCC_GPIO_ClockCmd(GPIOA,ENABLE); GPIO_PinAFConfig(GPIOA,GPIO_PinSource8,GPIO_AF_1); GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1); GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8; GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPD; GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); }
同樣的,配置PB4作為TIM3_CH1,代碼略。
2.22 TIM1初始化
程序中調用TIM1_Monopulse_Init()函數配置TIM1的自動預裝載值為(10000-1),預分頻器的值為(SystemCoreClock / 1000000 - 1),即TIM1定時器發生更新事件的周期為10ms。
TIM1_Monopulse_Init(10000-1,SystemCoreClock/1000000-1);
在該函數中配置了TIM1_CH1輸出PWM,輸出信號極性為高電平有效,脈沖寬度為50%,使能TIM1單脈沖輸出模式。配置TIM1_CH2輸入捕獲,從模式觸發源選擇TI2FP2作為計數器的觸發輸入,在信號的上升沿啟動。詳見函數定義如下:
voidTIM1_Monopulse_Init(u16arr,u16psc)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStruct;
TIM_OCInitTypeDefTIM_OCInitStruct;
TIM_ICInitTypeDefTIM_ICInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1,ENABLE);
TIM_DeInit(TIM1);
TIM_TimeBaseStructInit(&TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period=arr;
TIM_TimeBaseStruct.TIM_Prescaler=psc;
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter=0;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStruct);
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=arr/2;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OCIdleState=TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1,&TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_ICStructInit(&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel=TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPolarity=TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICSelection=TIM_ICSelection_DirectTI;
TIM_ICInitStruct.TIM_ICPrescaler=TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICFilter=0x0;
TIM_ICInit(TIM1,&TIM_ICInitStruct);
TIM_ARRPreloadConfig(TIM1,ENABLE);
TIM_SelectOnePulseMode(TIM1,TIM_OPMode_Single);
TIM_SelectInputTrigger(TIM1,TIM_TS_TI2FP2);
TIM_SelectSlaveMode(TIM1,TIM_SlaveMode_Trigger);
TIM_SetCounter(TIM1,0);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);
}
2.23 TIM3初始化
程序中調用TIM3_PWM_Init()函數配置TIM3的自動預裝載值為(10000-1),預分頻器的值為(SystemCoreClock / 1000000 - 1),即TIM3定時器發生更新事件的周期為20ms。
TIM3_PWM_Init(10000-1,SystemCoreClock/1000000-1);
在該函數中配置了TIM3_CH1輸出PWM,輸出信號極性為高電平有效,脈沖寬度為25%。詳見函數定義如下:
voidTIM3_PWM_Init(u16arr,u16psc)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStruct;
TIM_OCInitTypeDefTIM_OCInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1ENR_TIM3,ENABLE);
TIM_TimeBaseStructInit(&TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period=arr;
TIM_TimeBaseStruct.TIM_Prescaler=psc;
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter=0;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStruct);
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=(arr/4)*3;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OC1Init(TIM3,&TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE);
TIM_SetCounter(TIM3,0);
TIM_Cmd(TIM3,ENABLE);
}
按照上述配置,PB4(TIM3_CH1)作為PA9(TIM1_CH2)的輸入端,當PA9捕捉到PB4輸出的PWM的上升沿時,TIM1計數器啟動計數,控制延時為5ms,PA8輸出一個脈寬為5ms的脈沖。
2.3 下載驗證
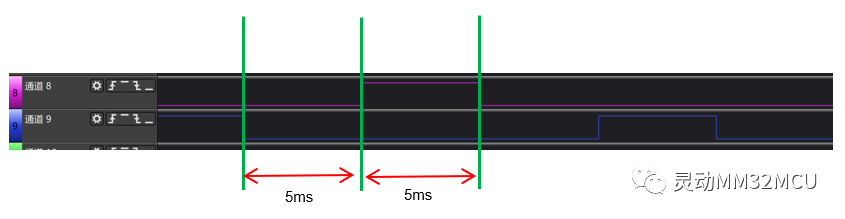
連接PA9(TIM1_CH2)和PB4(TIM3_CH1),使用邏輯分析儀連接PA8和PA9,運行程序觀測波形如下:

其中,通道8連接PA8,通道9連接PA9:

測量兩段間距均為5ms,運行結果和上述配置一致。
關于靈動
上海靈動微電子股份有限公司成立于 2011 年,是中國本土領先的通用 32 位 MCU 產品及解決方案供應商。公司基于 Arm Cortex-M 系列內核開發的 MM32 MCU 產品擁有 F/L/A/SPIN/W 五大系列,目前已量產 200多款型號,累計交付超3億顆,每年都有近億臺配備了靈動 MM32MCU 的優秀產品交付到客戶手中,在本土通用 32 位 MCU 公司中位居前列。
靈動客戶涵蓋智能工業、汽車電子、通信基建、醫療健康、智慧家電、物聯網、個人設備、手機和電腦等應用領域。靈動是中國為數不多的同時獲得了 Arm-KEIL、IAR、SEGGER 官方支持的本土 MCU 公司,并建立了獨立、完整的通用 MCU 生態體系。靈動始終秉承著“誠信、承諾、創新、合作”的精神,為客戶提供從硬件芯片到軟件算法、從參考方案到系統設計的全方位支持。

-
mcu
+關注
關注
146文章
16984瀏覽量
350293 -
定時器
+關注
關注
23文章
3237瀏覽量
114467 -
單脈沖
+關注
關注
0文章
27瀏覽量
12700 -
靈動微電子
+關注
關注
7文章
118瀏覽量
19620 -
靈動微
+關注
關注
4文章
174瀏覽量
22654 -
MM32
+關注
關注
1文章
106瀏覽量
744
原文標題:靈動微課堂 (第238講)|MM32F5270定時器單脈沖輸出
文章出處:【微信號:MindMotion-MMCU,微信公眾號:靈動MM32MCU】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于MM32F5270開發板獲取雨滴傳感器的數據相關資料介紹
介紹幾種MM32F5270定時器常用的精準輸出脈沖數量的方法

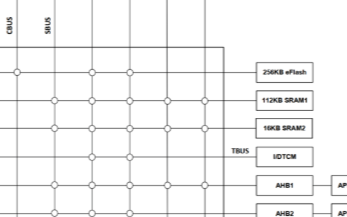
MM32F5270總線架構設計
基于MM32F5270控制器的I2S音頻播放
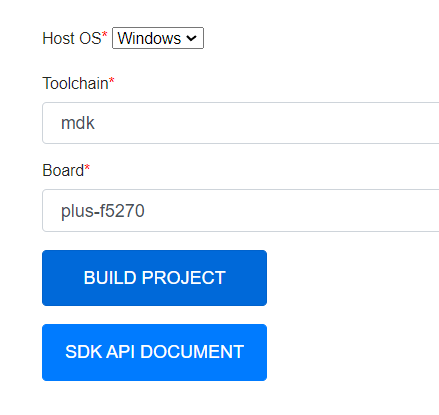
【MM32F5270】Keil開發環境搭建





 工商網監
工商網監
評論