") SLAM市場快速增長,SLAM芯片或成行業(yè)新風口?
SLAM市場快速增長,SLAM芯片或成行業(yè)新風口?
電子發(fā)燒友網(wǎng)報道(文/李寧遠)SLAM,simultaneous localization and mapping,稱為即時定位與地圖構(gòu)建,主要的作用是機器人或無人設備從未知環(huán)境的未知地點出發(fā),在運動過程中通過重復觀測到的地圖特征來定位自身位置和姿態(tài),再根據(jù)自身位置增量式的構(gòu)建地圖,從而達到同時定位和地圖構(gòu)建的目的。SLAM重要的理論與應用價值被認為是實現(xiàn)全自主移動機器人的關(guān)鍵技術(shù)。
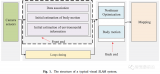
簡單來說,實現(xiàn) SLAM 需要兩類技術(shù),一類技術(shù)是傳感器信號處理(包括前端處理),這類技術(shù)在很大程度上取決于所用的傳感器性能。另一類技術(shù)是位姿圖優(yōu)化(包括后端處理),這類技術(shù)與傳感器無關(guān)取決于后端的算法處理。根據(jù)傳感器選擇不同,目前有兩個技術(shù)流派:視覺SLAM與激光雷達SLAM。
SLAM技術(shù)應用與技術(shù)對比
從應用方向上來看,目前SLAM技術(shù)主要的應用場景集中在機器人、自動駕駛、ARVR方向上。這些應用方向上,視覺SLAM和激光雷達SLAM兩條技術(shù)路線均有不少落地項目,二者也各有優(yōu)勢。
視覺 SLAM使用相機和其他圖像傳感器來采集圖像,不同的圖像傳感器能實現(xiàn)的SLAM效果不同,如普通相機(廣角、魚眼和球形相機)、復眼相機(立體相機和多相機)和 RGB-D 相機(深度相機和 ToF 相機)。視覺SLAM相對來說實現(xiàn)的成本更低,此外,相機可以提供大量信息,因此還可以用來檢測路標。路標檢測還可以與基于圖的優(yōu)化結(jié)合使用,這有助于靈活實現(xiàn)SLAM。
激光雷達 SLAM使用激光雷達傳感器,對比相機、ToF 和其他傳感器,激光可以使精確度大大提高,常用于自動駕駛汽車和無人機等高速移動運載設備的相關(guān)應用。激光傳感器點云提供了高精確度距離測度數(shù)據(jù),特別適用于SLAM建圖。一般來說,首先通過點云匹配來連續(xù)估計移動。然后,使用計算得出的移動數(shù)據(jù)進行車輛定位。但就點云密度而言,激光點云不及圖像精細,因此并不總能提供充足的特征來進行匹配。此外,點云匹配通常需要高處理能力,因此必須優(yōu)化流程來提高速度。
鑒于存在這些挑戰(zhàn),自動駕駛汽車以及高端移動機器人定位通常會使用3D SLAM,并融合輪式測距、全球?qū)Ш叫l(wèi)星系統(tǒng)GNSS和IMU數(shù)據(jù)等其他測量結(jié)果。
這里總結(jié)了一些主流技術(shù)路線的SLAM效果對比,如下圖。細分的技術(shù)路線還是非常豐富的,在分辨率、避障距離、算法難度、硬件成本上各有優(yōu)勢,這里沒有單獨列出激光雷達路線下的2D與3D路線。基于多線激光雷達的3D SLAM定位技術(shù),是目前全球定位最領先,商業(yè)化落地最成功的3D SLAM定位導航技術(shù),唯一的軟肋在于成本還未完全下探。
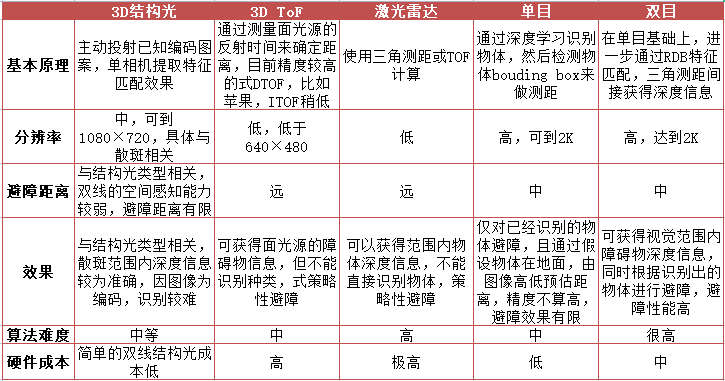
電子發(fā)燒友網(wǎng)制圖
市場規(guī)模發(fā)展與上下游分布
不同調(diào)研機構(gòu)對SLAM產(chǎn)業(yè)鏈覆蓋的范圍選擇會有一些差異,因此各機構(gòu)給出的規(guī)模預測不盡相同。根據(jù)P&S Intelligence發(fā)布的市場研究報告,到2030年,SLAM技術(shù)市場規(guī)模預計將從2021年的1.575億美元增長到37.478 億美元,年復合增長率超過42.2%。
而根據(jù)GIR(Global Info Research)調(diào)研數(shù)據(jù),2021年全球SLAM即時定位與地圖構(gòu)建技術(shù)收入大約3.599億美元,預計2028年達到24.579億美元,2022至2028期間,年復合增長率為34.2%。
雖然不同市場調(diào)研機構(gòu)給出的市場規(guī)模不同,但是整個市場的快速增長已經(jīng)有目共睹,而且還將延續(xù)高增長態(tài)勢。其中,無人駕駛設備的火熱無疑起到了最重要的助推作用。聯(lián)網(wǎng)車輛技術(shù)的發(fā)展以及對安全、高效和高效駕駛選擇的需求的增加,提高了對無人駕駛車輛的需求。這些無人駕駛設備中少不了SLAM導航技術(shù)的加持,隨著對無人駕駛設備的需求增加,SLAM技術(shù)會迎來爆發(fā)式增長。
SLAM雖然很吃傳感器的性能但本質(zhì)上是算法技術(shù),所以其產(chǎn)業(yè)鏈上下游的分布非常廣,產(chǎn)業(yè)鏈任一環(huán)節(jié)的廠商都可以選擇自研SLAM提高競爭力。這里以機器人應用為例,機器人本體廠商一般都會自研SLAM算法,畢竟這是設備廠商核心的競爭力;最上游的主控芯片廠商也有開始自研SLAM算法,將算法在芯片層面硬件化;中游的傳感器廠商也有不少自研SLAM,并與自家傳感器打包成整個導航模塊提供給下游設備廠商,做差異化競爭。現(xiàn)在的趨勢是越來越多上游的芯片廠商,傳感器廠商開始自研SLAM提高在目標應用領域的競爭力。
相關(guān)的SLAM芯片廠商
做SLAM芯片的廠商相對于產(chǎn)業(yè)鏈其他環(huán)節(jié)的廠商來說不算多,但是將算法在芯片層面硬件化優(yōu)勢巨大,這里我們聚焦在國內(nèi)的SLAM算法及芯片提供商上。
一微半導體:SLAM專用芯片聚焦機器人應用
一微半導體是國內(nèi)少有的能同時提供慣性導航eSLAM、激光SLAM導航和視覺導航vSLAM芯片、算法及完整解決方案的供應商,各款專用SLAM芯片在眾多國內(nèi)外機器人品牌上被采用。
圖源:一微半導體
一微半導體2018年發(fā)布的AM380S是全球首顆全集成SLAM專用芯片,后續(xù)的AM580、AM680、AM780分別配套高性價比的激光雷達SLAM方案與視覺SLAM方案。這些SLAM專用芯片本質(zhì)是高性能高集成度的SOC,核心是算法硬件化,如AM580就特別針對激光雷達方案算法內(nèi)建掃描匹配及雙三次插值等硬件加速模塊,既提高處理效率,又降低運算功耗。上游廠商在源頭上更好地解決了芯片、方案、激光模組在軟硬件方面的融合。
耀宇視芯:自研SLAM芯片主攻ARVR領域
耀宇視芯是今年才成立的一家SALM算法及芯片提供商,提供ARVR行業(yè)的SLAM軟硬件解決方案。目前ARVR技術(shù),能實現(xiàn)室內(nèi)外區(qū)域的高精度空間定位,隨著算力逐漸提升,基于ARVR的各種SLAM應用還將拓展到遠程看房、模擬旅游、房屋裝修等眾多應用領域。
據(jù)悉,耀宇視芯有三大核心技術(shù),6DoF SLAM算法,已在國產(chǎn)頭部手機廠商中產(chǎn)品化落地,ARVR層面已達低延遲和亞毫米級精度,實現(xiàn)虛擬與現(xiàn)實的交互,云和端高度融合;6DoF SLAM芯片已在逐步產(chǎn)品化交付中;云端地圖服務,云端SLAM和終端SLAM一體化,高度融合等。
長光華芯:SLAM VCSEL芯片正穩(wěn)步推進中
長光華芯致力于高功率半導體激光器芯片、高效率激光雷達與3D傳感芯片研發(fā)。根據(jù)長光華芯官方消息,目前長光華芯機器人用SLAM VCSEL芯片已經(jīng)少量出貨國內(nèi)頭部企業(yè),方案驗證中,處于穩(wěn)步推進階段。
地平線:人工智能+SLAM賦能機器人與自動駕駛
非常具有代表性的上游芯片廠商自己做SLAM的例子,地平線兩種技術(shù)路線均有涉及。旗下Matrix自動駕駛計算平臺核心硬件里包含了僅通過單目攝像頭視覺感知即可在車端實現(xiàn)的地圖采集與實時建圖能力,以及激光雷達感知方案下的多線360°激光雷達3D SLAM點云檢測能力。
圖源:地平線
點云建圖過程全部在邊緣端進行,利用深度學習和SLAM技術(shù)進行道路場景的語義三維重建,能將地圖元素重建、識別并矢量化。在車規(guī)級AI芯片的強大的算力加持下,地平線的SLAM能力異常強大。地平線可以提供和SLAM技術(shù)相關(guān)的機器人、自動駕駛的從開發(fā)板到模塊的整套配件。
除了強大的整套配件,在基礎算法層面,地平線提供從2D到3D的物體檢測再到3D場景理解的多維度算法參考。據(jù)悉,目前地平線的SLAM研發(fā)聚焦在研發(fā)光流、高程、V-SLAM、RGB-D、三維重建等方面。
寫在最后
最后展望一下SLAM市場,可以預見3D視覺SLAM和3D激光雷達SLAM隨著計算機處理速度的顯著提高,以及更低成本傳感器的應用,將被廣泛應用于從AR到機器人到自動駕駛各個領域,并更新2D SLAM技術(shù)相關(guān)應用。
另外,SLAM算法需要首先從傳感器的數(shù)據(jù)中去提取特征點,然后做特征點匹配算法,最后做移動估計。這一套算法隨著SLAM技術(shù)以及傳感器技術(shù)的發(fā)展,在DSP或CPU上的執(zhí)行效率已經(jīng)顯得不夠了,因此未來會愈發(fā)需要使用專用芯片來實現(xiàn)高效率SLAM。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
SLAM
+關(guān)注
關(guān)注
23文章
419瀏覽量
31789
發(fā)布評論請先 登錄
相關(guān)推薦
最新圖優(yōu)化框架,全面提升SLAM定位精度
同時定位與地圖構(gòu)建(SLAM)是一項關(guān)鍵技術(shù),允許移動機器人在部分或完全未知的環(huán)境中自主導航。它包括使用機載傳感器同時估計機器人狀態(tài)和構(gòu)建傳感器檢測到的環(huán)境地圖。SLAM可以根據(jù)傳感器和地圖構(gòu)建技術(shù)

激光雷達在SLAM算法中的應用綜述
一、文章概述 1.1 摘 要 即時定位與地圖構(gòu)建(simultaneous localization and mapping,SLAM)是自主移動機器人和自動駕駛的關(guān)鍵 技術(shù)之一,而激光雷達則是支撐

MG-SLAM:融合結(jié)構(gòu)化線特征優(yōu)化高斯SLAM算法
同步定位與地圖構(gòu)建 (SLAM) 是計算機視覺中的一個基本問題,旨在在同時跟蹤相機姿勢的同時對環(huán)境進行地圖構(gòu)建。基于學習的密集 SLAM 方法,尤其是神經(jīng)輻射場 (NeRF) 方法,在捕獲密集光度

從算法角度看 SLAM(第 2 部分)
,分別是基于濾波器的 SLAM、基于圖形的 SLAM 和基于深度學習的 SLAM。 基于濾波器的 SLAM 將 SLAM 視為狀態(tài)估計問題。

一種適用于動態(tài)環(huán)境的實時視覺SLAM系統(tǒng)
既能保證效率和精度,又無需GPU,行業(yè)第一個達到此目標的視覺動態(tài)SLAM系統(tǒng)。

機器人高效導航定位背后SLAM專用芯片的崛起
。 ? SLAM技術(shù)是定位與地圖構(gòu)建技術(shù),其重要的理論與應用價值被認為是實現(xiàn)自動駕駛和全自主移動機器人的關(guān)鍵技術(shù)。小到掃地機器人,大到自動駕駛汽車,無人自主移動設備近些年的快速發(fā)展加速了SLAM
深度解析深度學習下的語義SLAM
隨著深度學習技術(shù)的興起,計算機視覺的許多傳統(tǒng)領域都取得了突破性進展,例如目標的檢測、識別和分類等領域。近年來,研究人員開始在視覺SLAM算法中引入深度學習技術(shù),使得深度學習SLAM系統(tǒng)獲得了迅速發(fā)展,并且比傳統(tǒng)算法展現(xiàn)出更高的精度和更強的環(huán)境適應性。
發(fā)表于 04-23 17:18
?1245次閱讀

工程實踐中VINS與ORB-SLAM的優(yōu)劣分析
ORB-SLAM是一種基于特征的單目視覺SLAM系統(tǒng),廣泛用于實時三維地圖構(gòu)建和機器人定位。該系統(tǒng)使用ORB特征進行高效的視覺識別和地圖重建,支持關(guān)鍵幀技術(shù)和回環(huán)檢測來優(yōu)化地圖的準確性。

什么是SLAM?SLAM算法涉及的4要素
SLAM技術(shù)可以應用在無人駕駛汽車、無人機、機器人、虛擬現(xiàn)實等領域中,為這些領域的發(fā)展提供了支持。SLAM技術(shù)的發(fā)展已經(jīng)逐漸從單純的定位和地圖構(gòu)建轉(zhuǎn)向了基于場景理解的功能。
發(fā)表于 04-04 11:50
?2212次閱讀
什么是SLAM?基于3D高斯輻射場的SLAM優(yōu)勢分析
基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數(shù),通過可微分渲染捕獲稠密的光度信息,具有高保真度。
從基本原理到應用的SLAM技術(shù)深度解析
LSD-SLAM 即 Large-Scale Direct SLAM,兼容單目相機和雙目相機。LSD-SLAM是一種基于光流跟蹤的直接法SLAM,但是實現(xiàn)了半稠密建圖,建圖規(guī)模大,可以
發(fā)表于 02-26 09:41
?9009次閱讀

基于NeRF/Gaussian的全新SLAM算法
基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數(shù),通過可微分渲染捕獲稠密的光度信息,具有高保真度。

坐標系在動態(tài)SLAM中究竟有多重要?
大多同時定位于建圖(SLAM)系統(tǒng)在傳統(tǒng)上假定的都是靜態(tài)世界,這與現(xiàn)實世界的場景不符。

NeRF何去何從?GS SLAM到底哪家強?來看看最新的開源方案!
Gaussian-SLAM提出了用于seeding和優(yōu)化Gaussian splats的新策略,以將其從多視圖離線場景擴展到RGBD序列。還擴展了Gaussian splats來編碼幾何圖形并嘗試

基于視覺SLAM的研究現(xiàn)狀
目前視覺SLAM系統(tǒng)可以在微型個人計算機(PC)和嵌入式設備中運行,甚至可以在智能手機等移動設備中運行(Klein和Murray,2009)。與室內(nèi)或室外移動機器人不同,自動駕駛車輛具有更復雜的參數(shù),尤其是當車輛在城市環(huán)境中自動駕駛時。
發(fā)表于 12-04 09:22
?1000次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論