 Windows實時運動控制軟核(一):LOCAL高速接口測試之C#
Windows實時運動控制軟核(一):LOCAL高速接口測試之C#
今天,正運動小助手給大家分享一下MotionRT7的安裝和使用,以及使用C#操作上位機前需要做的一些準備工作。
01 MotionRT7簡介
MotionRT7是深圳市正運動技術推出的跨平臺運動控制實時內核,也是國內首家完全自主自研,自主可控的Windows運動控制實時軟核。

1.MotionRT7具備以下特點:
(1)獨立軟件安裝,適合各種Windows電腦;綠色免安裝,快速體驗;采用硬件綁定的運行許可證授權(未授權也可試用);可以方便的配置、啟動、連接、模擬運行等。
(2)與MotionRT其它版本功能兼容,一次開發,可快速切換到嵌入式,Linux各種平臺。
(3)統一函數庫接口,快速的本地LOCAL接口,運動函數調用快至us級別,比普通PCI卡快數十倍。
(4)集成機器視覺,快速搭建各類運動控制+機器視覺的實時應用。
(5)強大多卡功能,最多240軸聯動,支持跨卡聯動,脈沖與總線聯動,振鏡與平臺聯動,輕松實現位置鎖存/PSO等高級功能。
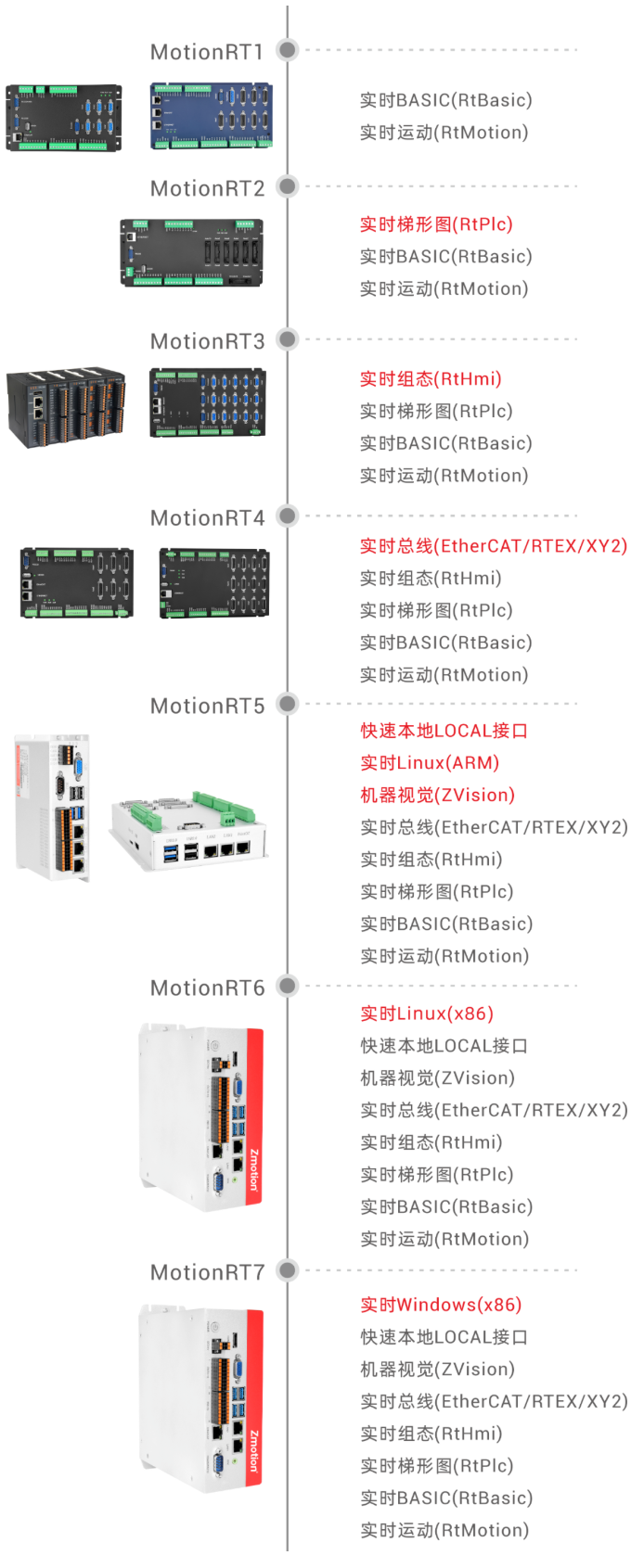
2.持續迭代的運動控制實時內核MotionRT
MotionRT是正運動技術持續建設與發展的運動控制實時內核,已不斷迭代了7代,從MotionRT1到MotionRT7。
3.MotionRT7采用模塊化軟件架構
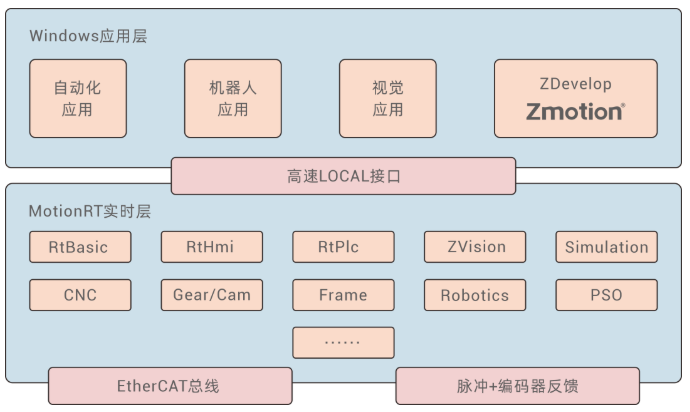
運動控制程序、視覺算法、MotionRT7運動控制引擎,通過高共享內存進行數據交互,大大提升運動控制與機器視覺的交互效率。用戶自定義功能,融合Gmc、Gear/Cam、Frame、Robotics、CNC等算法,打造用戶的專用控制系統。
4.統一開放的API函數
統一完善的SDK庫,所有的第三方開發環境同一套API接口,跨平臺的產品架構,提高效率,保持兼容性。

5.簡單易用的運動控制功能
功能特性:
a.點位運動、直線插補、圓弧插補、螺旋插補、連續軌跡加工;
b.電子凸輪、電子齒輪、同步跟隨、位置鎖存、虛擬軸整加;
c.S曲線加減速,SS曲線加減速,軌跡運動更柔和;
d.1D/2D/3D高速位置同步輸出PS0,充分滿足視覺飛拍、高速點膠、激光加工;
e.客戶可自定義運動控制算法或者機器人正反解算法;
f.方便與第三方視覺配合。
6.開放的EtherCAT與配置調試工具
ZDevelop具備開放易用的配置,開發,調試,診斷等工具。而且ZDevelop是個綠色免費的軟件,具備軸調試,軸狀態,示波器等工具。
MotionRT7廣泛支持EtherCAT總線,MotionRT7支持市面上廣泛易用的EtherCAT伺服,EtherCAT步進,EtherCAT IO,EtherCAT閥島,EtherCAT傳感器。后續將持續完善EtherCAT的配置工具,持續努力做最好用的運動控制。
02 MotionRT7的安裝和使用
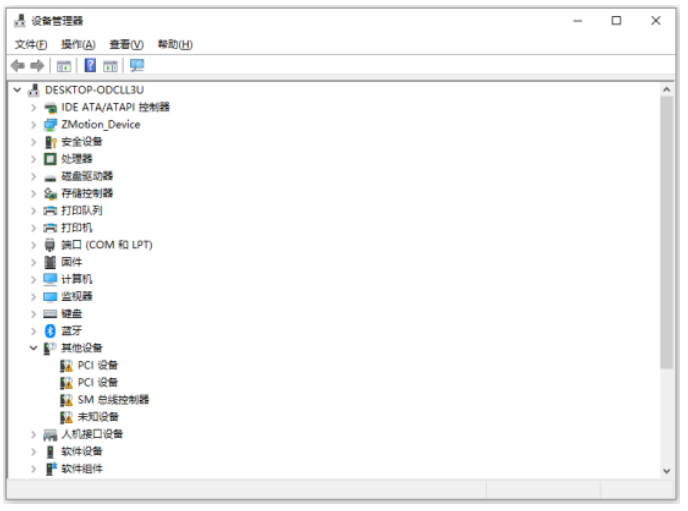
第一步:安裝驅動程序
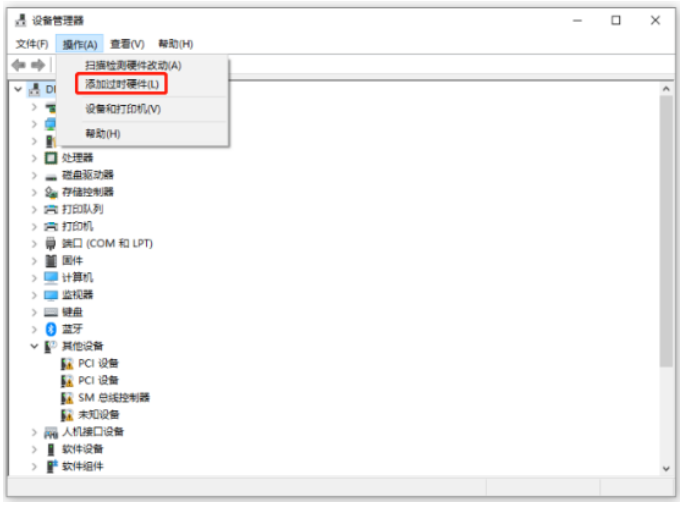
1.打開“設備管理器”,選擇“操作”中的“添加過時硬件”,并且選擇“手動選擇”。
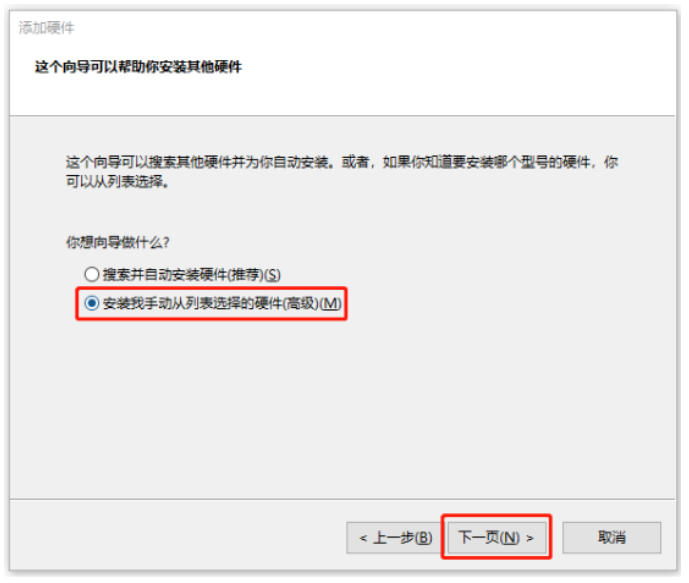
2.點擊“下一頁”。
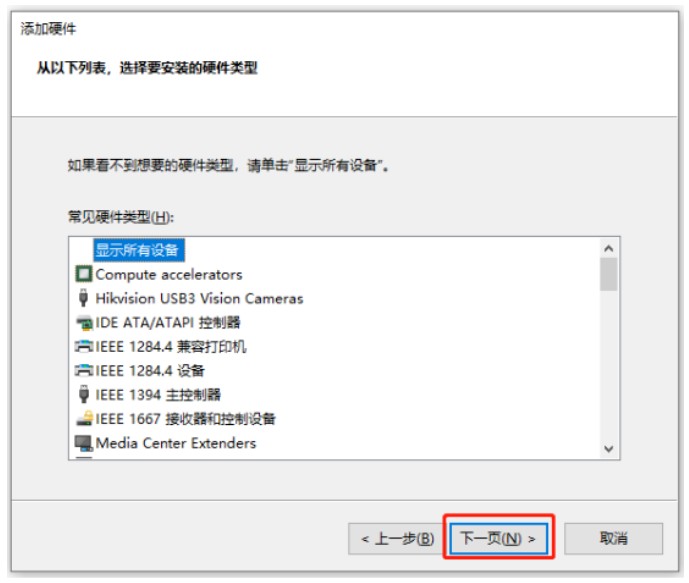
3.點擊“從磁盤安裝”。

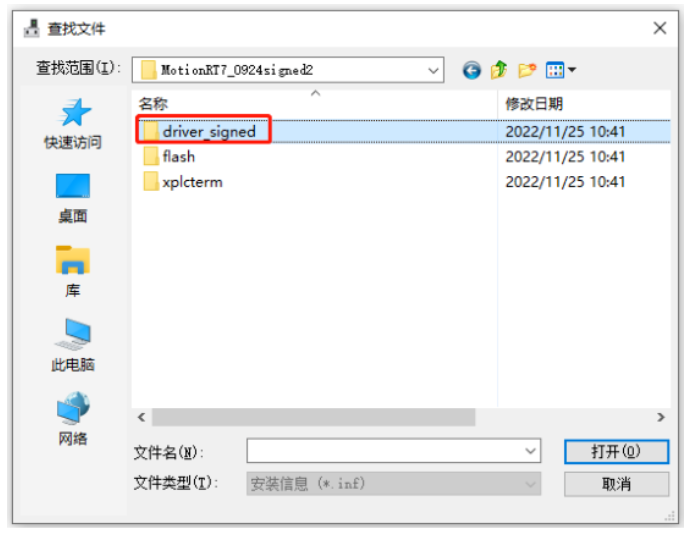
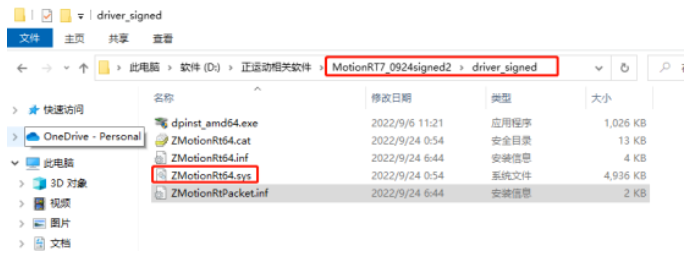
4.選擇驅動器所在的路徑,打開文件夾“driver_signed”,選擇“MotionRt64.sys”。

5.然后一直點擊下一步,直到安裝完成。
注意:驅動更新時,要從設備管理器刪除設備,一定要選擇把驅動文件也刪除。
第二步:運行控制臺程序
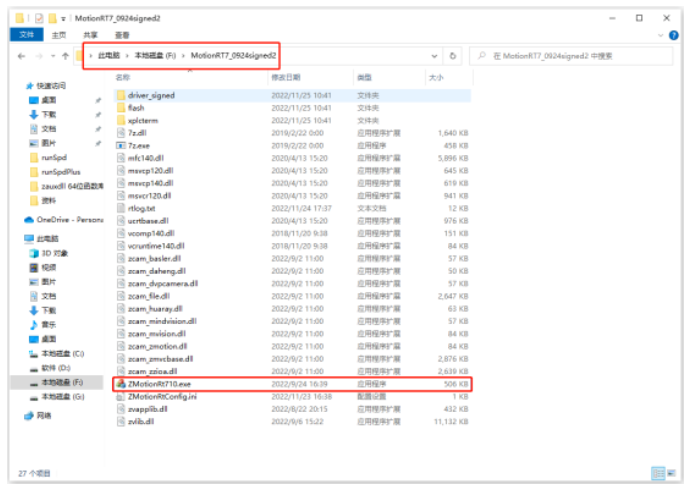
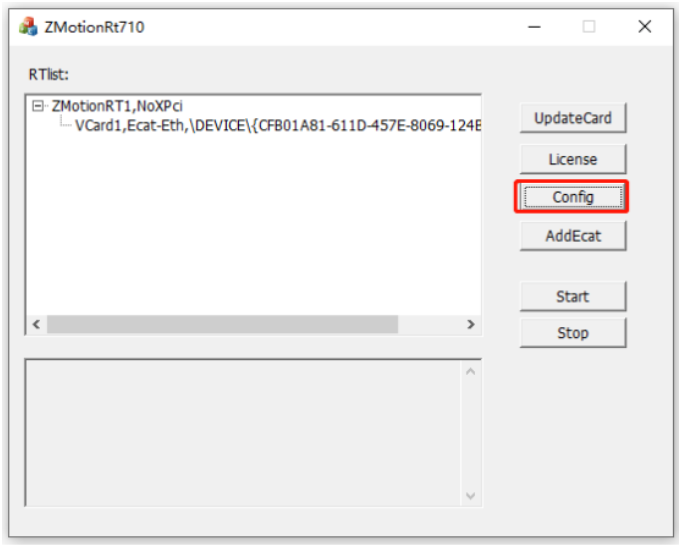
1.打開控制臺程序所在位置,運行可執行文件“MotionRt710.exe”。
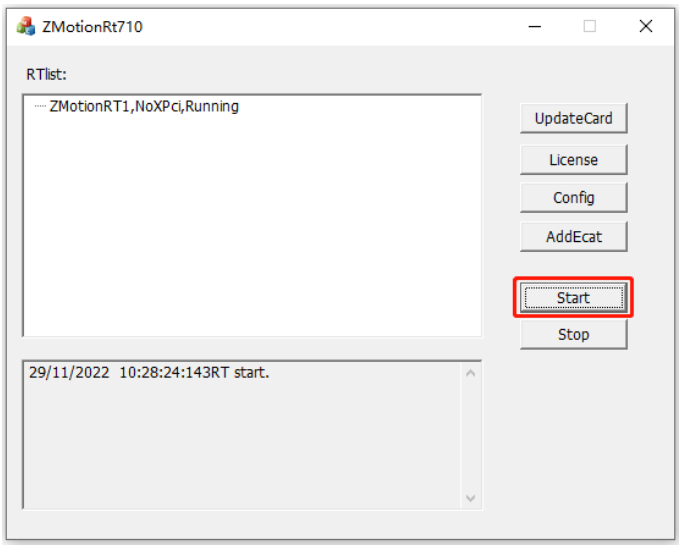
2.點擊“Start”。
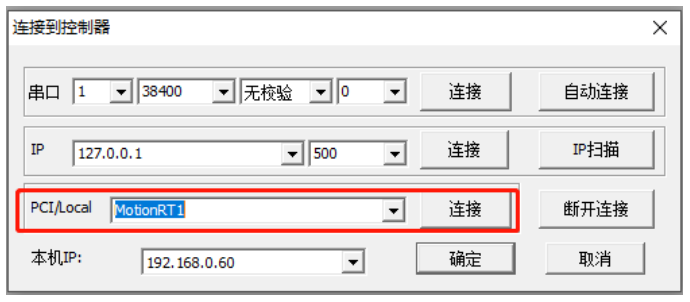
ZDevelop鏈接控制器,軟件版本3.10以上,使用PCI/LOCAL方式進行連接。
第四步:網口擴展EtherCAT主站協議
1.查看網絡連接。
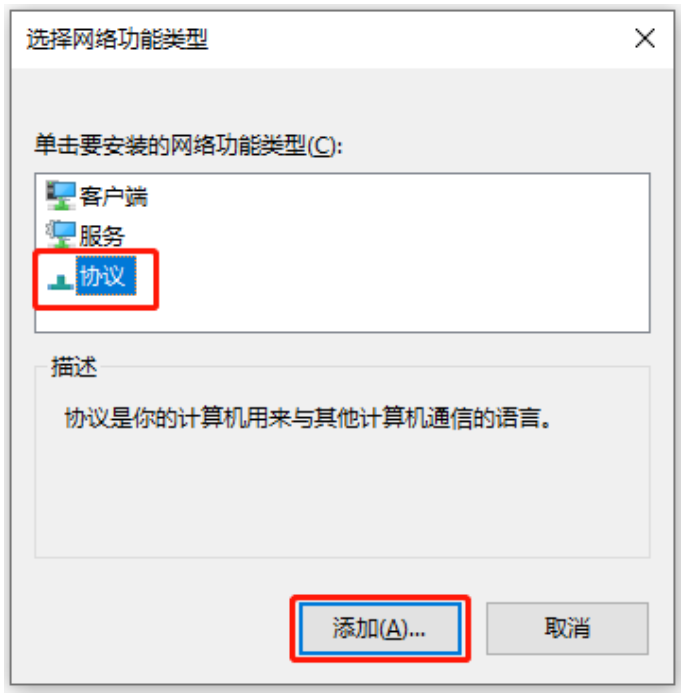
2.選擇用作EtherCAT的網卡,右鍵屬性,安裝協議。
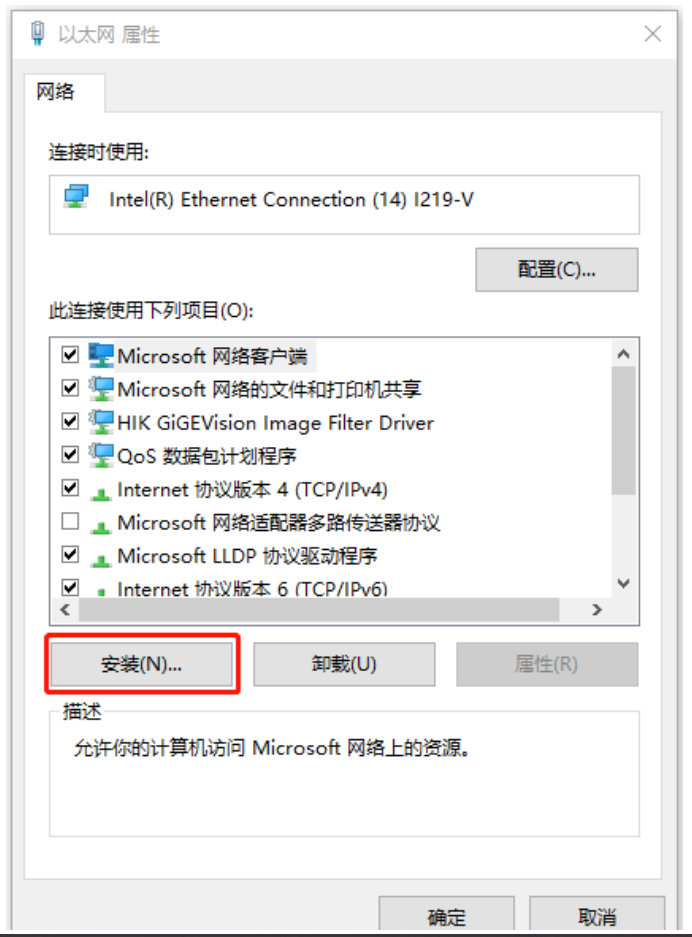
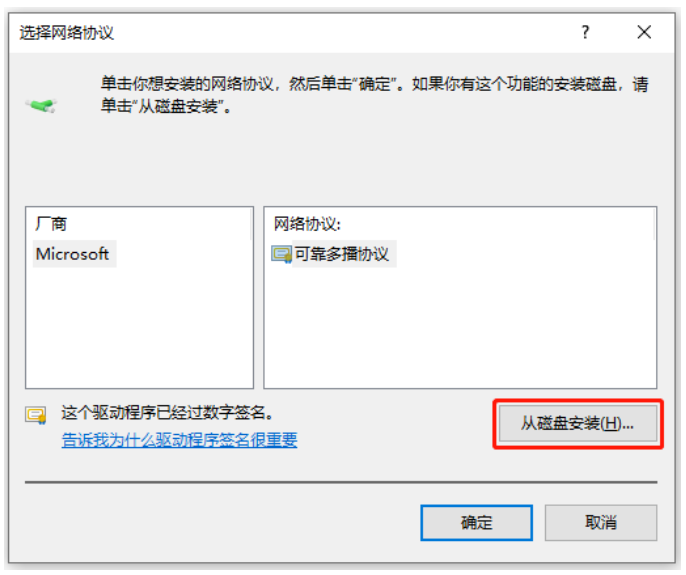
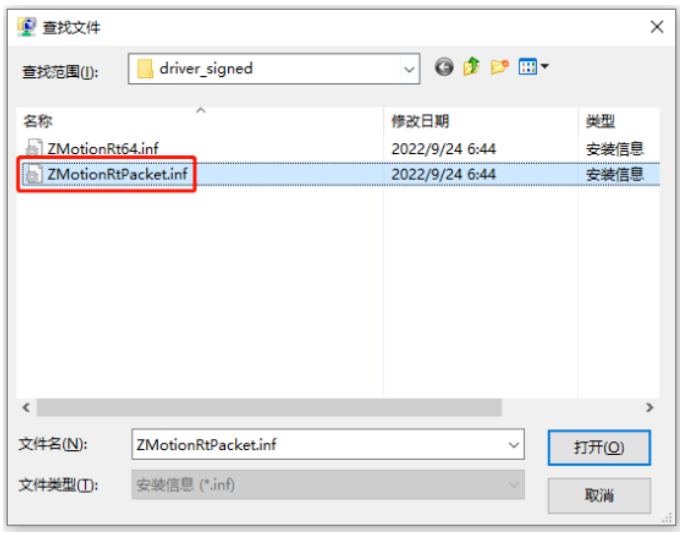
3.點擊從磁盤安裝,選擇驅動器所在的路徑,打開文件夾”driver_signed”,選擇“MotionRtPacket.inf”。

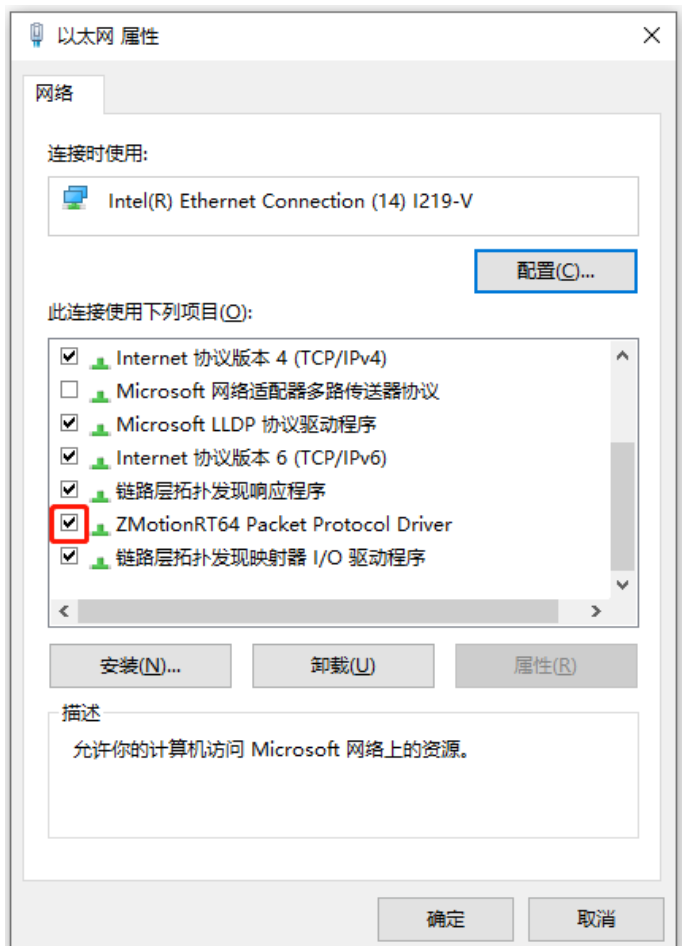
4.安裝成功后,確認MotionRT64 Packet Protocol Driver前面有選上。
在RT控制臺程序選擇增加AddEcat,這時能看到對應網卡,選擇上,然后啟動RT。
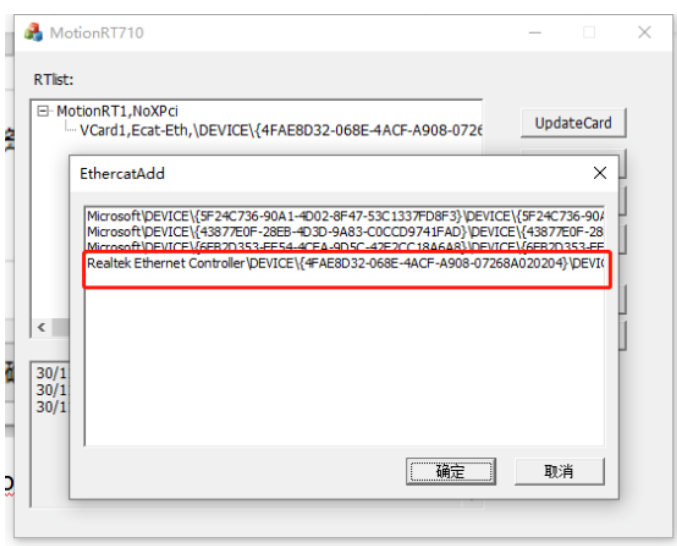
自帶PC的網卡EtherCAT有一定的實時性,如EtherCAT要提升性能,需要把網口其它的協議都去掉以提升實時性。
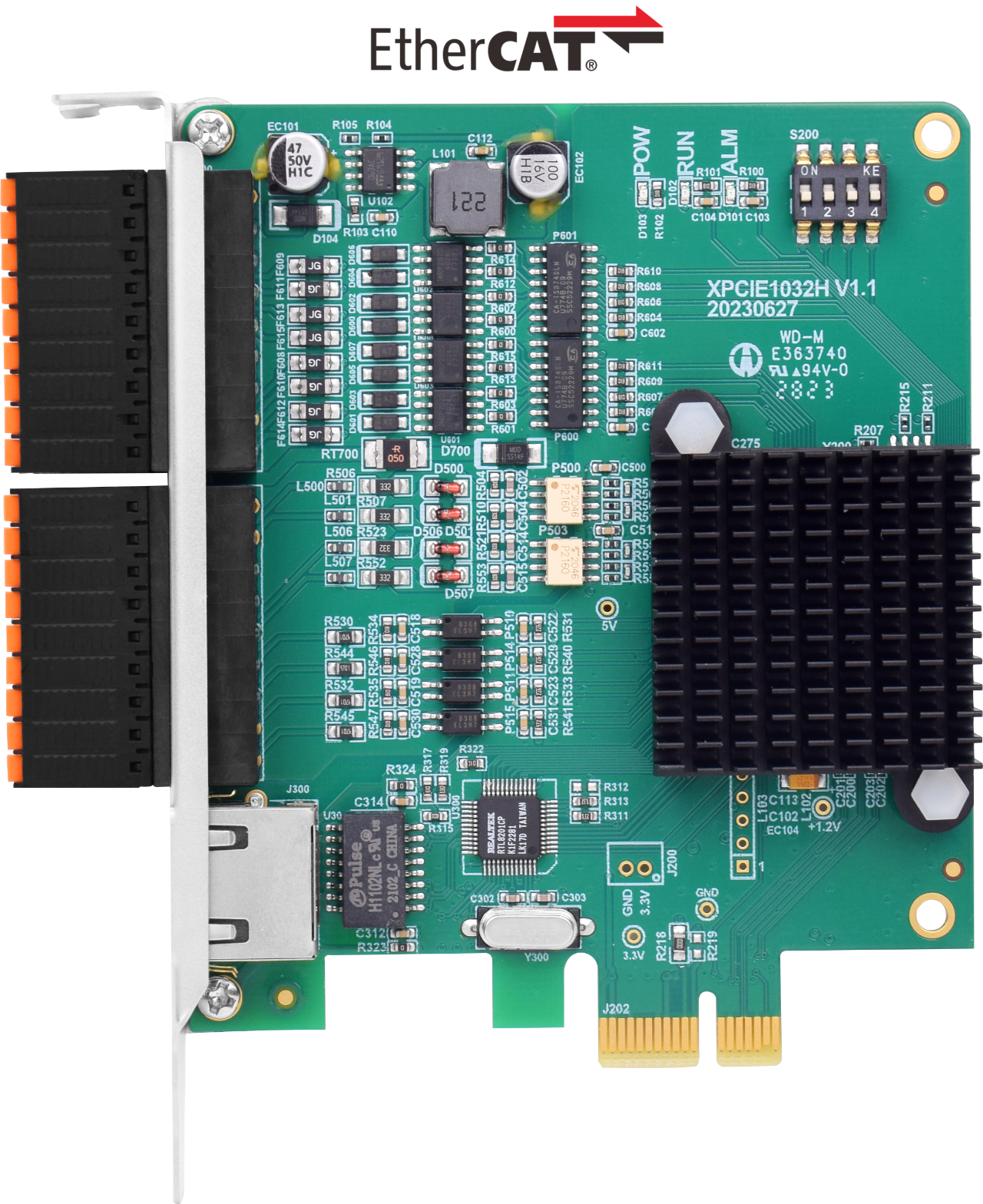
如需進一步提升實時性,請使用正運動專門的EtherCAT運動控制卡XPCIE1032。
更多關于MotionRT7的參數設置以及相關問題,請參照“MotionRT7說明書”。
相關資料請上正運動技術官網www.zmotion.com.cn或者聯系正運動相關人員。
03 C#進行MotionRT7項目的開發(開發環境vs2022)
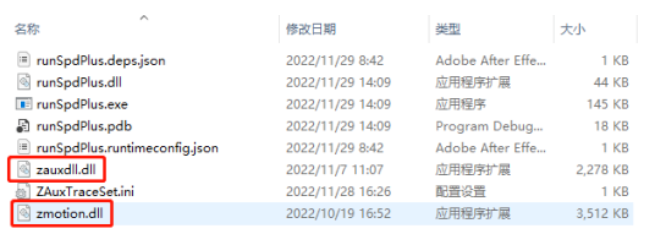
1.新建C#項目2.導入“Zmcaux.cs”,“zauxdll.dll”,“zmotion.dll”
(“Zmcaux.cs”放在項目文件中,與bin目錄同級)
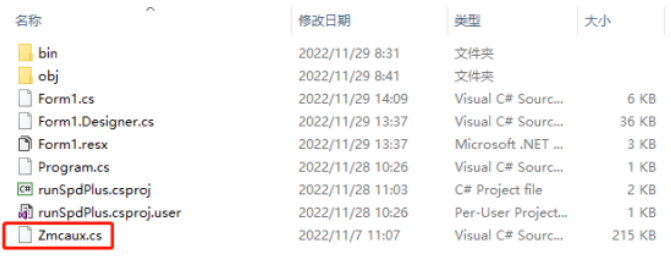
以x64為例,“zauxdll.dll”,“zmotion.dll”放在bin->x64->Debug->net6.0-windows。
3.相關功能開發(LOCAL高速接口測試,軸參數讀取,輸入口狀態監視)
相關PC函數介紹
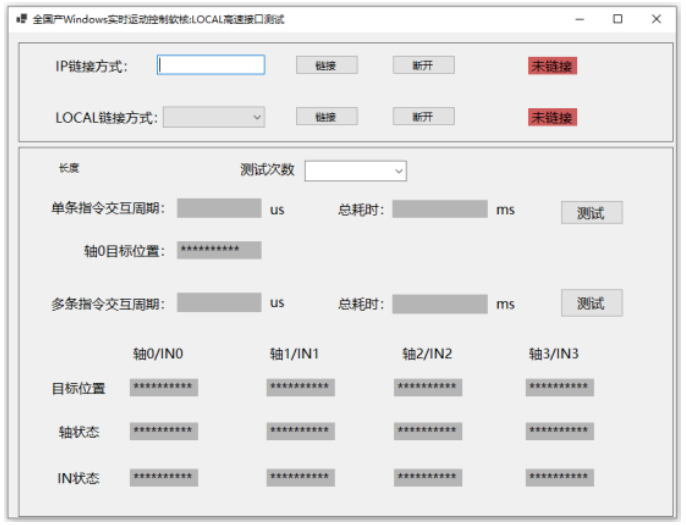
(1)找到需要用到的窗體組件界面。
(2)使用“Label” 組件作為狀態顯示或其它文本與數據的顯示,用“Button” 組件來觸發相關的函數,拖動左側工具箱中對應的組件到界面中,并且進行屬性或動作的配置即可。
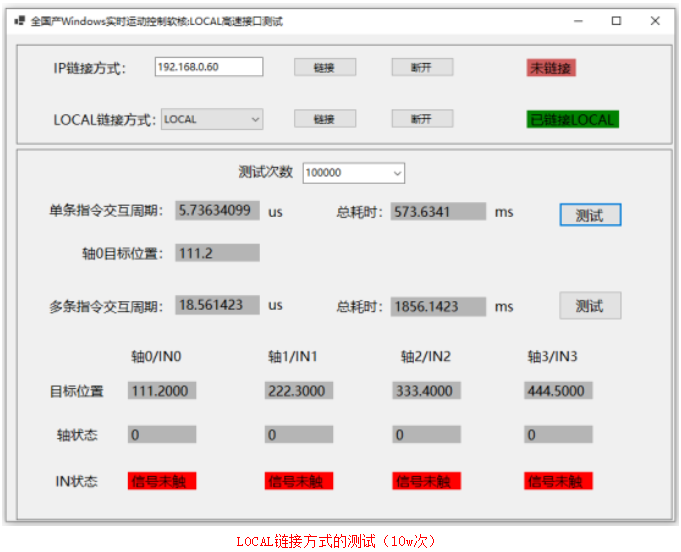
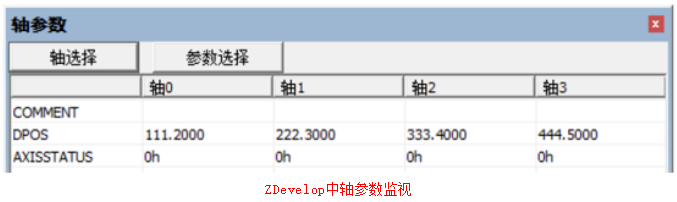
(3)最終的界面效果圖如下。
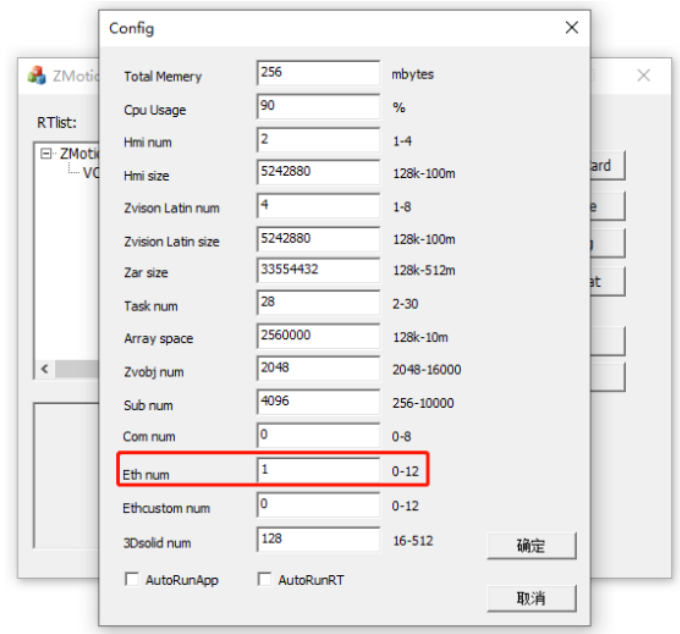
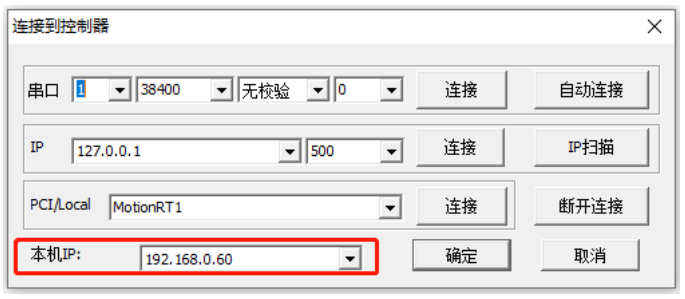
注:使用IP模式連接MotionRT7的時候,要將ZmotionRT710中的Config配置項Eth num的值設置為一個大于0的數(1-12),輸入的ip為本機ip,可以在ZDevelop中直接查看。
4.相關代碼
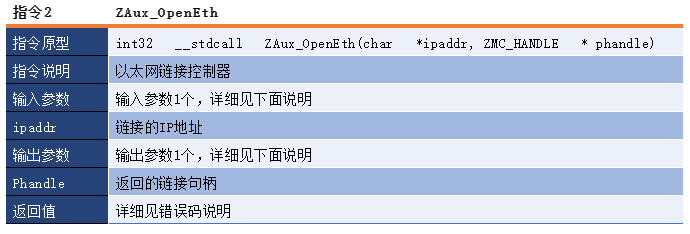
(1)通過IP鏈接方式的鏈接按鈕的事件處理函數來連接控制器(IP鏈接方式)。
private void IPConct(object sender, EventArgs e)
{
//關閉控制控制器,保證handle為空
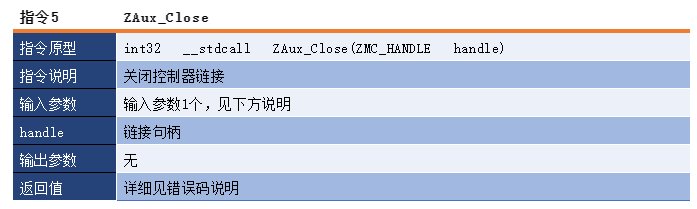
zmcaux.ZAux_Close(handle);
//網口方式連接
int ret = zmcaux.ZAux_OpenEth(textBox1.Text, out handle);
if(ret==0)
{
label2.Text = "已鏈接" + textBox1.Text;
label2.BackColor = Color.Green;
}
else
{
MessageBox.Show("鏈接失敗,請輸入正確的ip!");
}
}
(2)通過IP鏈接方式的斷開按鈕的事件處理函數來斷開控制器,對應IP鏈接方式的界面顯示。
private void IPDisConct(object sender, EventArgs e)
{
//IPDisConct函數用于斷開控制器的連接,對應網口連接方式
zmcaux.ZAux_Close(handle);
label2.Text = "未鏈接";
label2.BackColor= Color.IndianRed; ;
}
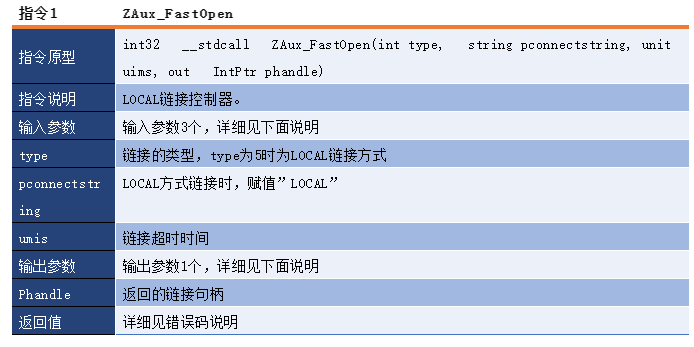
(3)通過LOCAL鏈接方式的鏈接按鈕的事件處理函數來連接控制器。
private void localConct(object sender, EventArgs e)
{
//LOCAL方式連接
int ret = zmcaux.ZAux_FastOpen(5,comboBox2.Text,1000,out handle); if (ret == 0)
{
label5.Text = "已鏈接" + comboBox2.Text;
label5.BackColor = Color.Green;
}
else
{
MessageBox.Show("鏈接失敗,請選擇正確的LOCAL!");
}
}
(4)通過LOCAL鏈接方式的斷開按鈕的事件處理函數來斷開控制器,對應LOCAL鏈接方式的界面顯示。
private void localDisConct(object sender, EventArgs e)
{
//IPDisConct函數用于斷開控制器的連接,對應LOCAL連接方式
zmcaux.ZAux_Close(handle);
label5.Text = "未鏈接";
label5.BackColor = Color.IndianRed; ;
}
(5)通過單條指令交互周期的測試按鈕的事件處理函數來計算單條指令的交互周期和總耗時。
private void run(object sender, EventArgs e)
{
//run函數用于測試單條指令交互周期與總耗時
float dpos = 0;
// beforeDT記錄交互指令前的時刻
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
//進行n次單指令交互
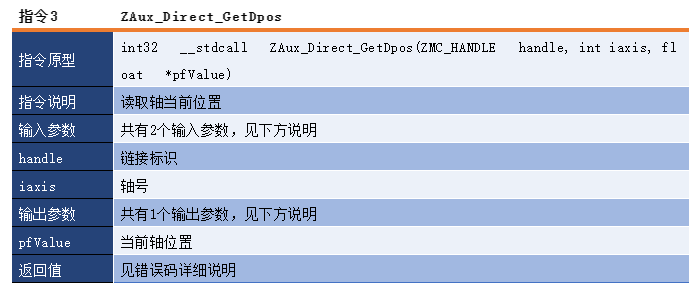
zmcaux.ZAux_Direct_GetDpos(handle, 0, ref dpos);
}
//afterDT記錄交互指令前的時刻
DateTime afterDT = System.DateTime.Now;
//計算beforeDT與afterDT的時間差
TimeSpan ts = afterDT - beforeDT;
//將ts轉換成ms并顯示(總耗時)
label11.Text = (ts.TotalMilliseconds).ToString();
//計算單條指令交互周期并顯示
label8.Text = ((ts.TotalMilliseconds * 1000) /(Convert.ToInt32(comboBox3.Text))).ToString();
label14.Text = dpos.ToString();
}
(6)通過多條指令交互周期的測試按鈕的事件處理函數來計算多條指令的交互周期和總耗時。
private void runMuch(object sender, EventArgs e)
{
int []status = {0, 0 , 0 ,0};
float []dpos = { 0, 0, 0, 0 };
uint []num = { 0, 0, 0, 0 };
string cmd;
int star = 0;
StringBuilder cmdBuff = new StringBuilder(2048);
string[] tmp = new string[12];
cmd = "?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)";
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
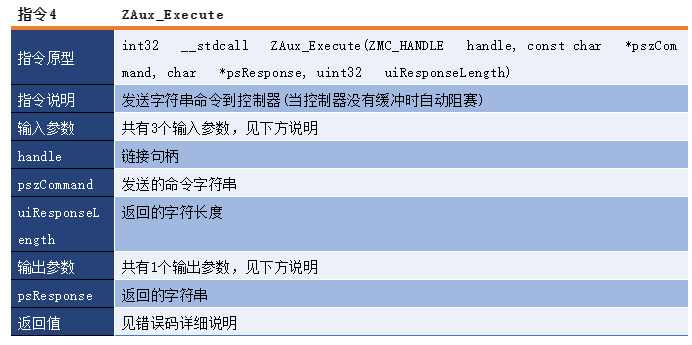
zmcaux.ZAux_Execute(handle, cmd, cmdBuff, 2048);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label23.Text = (ts.TotalMilliseconds).ToString();
label16.Text = ((ts.TotalMilliseconds * 1000) / (Convert.ToInt32(comboBox3.Text))).ToString();
string s = cmdBuff.ToString();
string[] arrS = new string[20];
for(int i = 0;i;i++)>
5.運行效果



LOCAL鏈接方式的測試(1w次)
5.分析與結論
以上分別是對IP方式鏈接MotionRT7與LOCAL方式鏈接MotionRT7的指令交互測試,從上面的運行效果圖的數據顯示來看,可以看出當進行1w次和進行10w次的單指令交互或多指令交互的時候,LOCAL鏈接的方式進行指令交互所需要的單條指令交互時間(平均5us左右),一次性讀取12個狀態的多條指令交互時間(平均18us左右)都是要比IP鏈接的方式更快(平均31us左右與119us左右)。
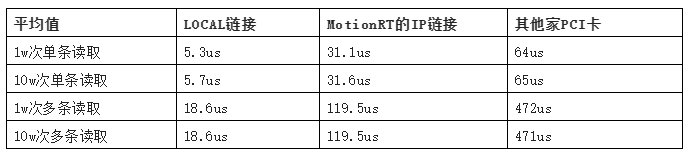
其次,我們可以從運行結果看出MotionRT7在LOCAL鏈接的方式下,指令交互的效率也是非常地穩定,當測試數量從1w增加到10w時,單條指令交互時間與多條指令交互時間波動不大,這將為工藝作業中穩定性提供了極大的保證。
MotionRT7的出現,無非是一次重大的驚喜與升級,它為我們在進行大批量指令交互的過程中,提供了更好的效率與穩定性,給生產創造更高的效率與更多的價值!
相關的函數請參照“ZMotion PC函數庫編程手冊”。
本次,正運動技術Windows實時運動控制軟核(一):LOCAL高速接口測試之C#,就分享到這里。
-
運動控制器
+關注
關注
2文章
393瀏覽量
24657 -
WINDOWS
+關注
關注
3文章
3524瀏覽量
88437 -
高速接口
+關注
關注
1文章
44瀏覽量
14762 -
運動控制
+關注
關注
4文章
566瀏覽量
32827 -
locale
+關注
關注
0文章
11瀏覽量
1172
發布評論請先 登錄
相關推薦
Windows實時運動控制軟核(七):LOCAL高速接口測試之Labview



正運動自主研發實時軟核MotionRT7與Labview單軸點動例程開發
MotionRT7實時運動控制使用:LOCAL高速接口測試之C#
Windows實時運動控制軟核(三):LOCAL高速接口測試之C++

MotionRT7的安裝和使用:LOCAL高速接口測試
Windows實時運動控制軟核(四):LOCAL高速接口測試之VB.NET

Windows實時運動控制軟核(五):LOCAL高速接口測試之VC6.0

Windows實時運動控制軟核(六):LOCAL高速接口測試之Matlab

Windows實時運動控制軟核(六):LOCAL高速接口測試之Matlab
Windows實時運動控制軟核(五):LOCAL高速接口測試之VC6.0
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發





 工商網監
工商網監
評論