 什么是電池管理系統(BMS)的算法?
什么是電池管理系統(BMS)的算法?
什么是BMS算法?加減乘除,最小二乘法,安時積分,卡爾曼濾波等都是算法。
BMS算法中SOC是重要項,但優秀的BMS絕不是把SOC當作核心,而是要把每個模塊做到極致并完美配合。本篇文章主要講解SOC方法,重點SOC估算方法推倒和建模。
SOC即電池荷電狀態,反應電池剩余容量,可定義如下:
汽車運行工況復雜,使鋰電池的參數不斷變化,電池SOC估算困難。由于電池的化學反應復雜,不能直接計算SOC,現在多數是根據電池外特性參數(開路電壓、內阻等)間接估算SOC,常見估算方法有如下幾種:
①安時積分法
安時積分法也簡稱為安時法(Ampere Hour,AH)是最常使用的SOC估算法,如果定義電池SOC初始狀態為SOC(0),t時刻電池SOC為:

安時積分法簡單易懂,在BMS中運算占用資源少,適用于所有電池。但是安時積分法未進行電池內部結構和外部電氣特性考慮,將充入電池的電量等同于從電池放出的電量,忽略電池內部電化學反應效率,造成誤差。安時積分法初始SOC選取要求較高,初始值誤差大了整體估算誤差增大,通過對負載電流積分計算估算放出電量,容易造成誤差累積。電流互感器自身就存在誤差,容易增大SOC估算誤差。為提高安時積分法SOC估算精度,通常在安時積分法中加入溫度、放電倍率、充放電循環次數等因素來提高安時積分法精度。
②開路電壓法
電池充放電過后經長時間靜置,其開路電壓可近似看成電動勢。前文有描述電池SOC與開路電壓之間存在對應關系,可以通過測量不同溫度下SOC值與電池開路可得到SOC-OCV關系矩陣。采用開路電壓法估算電池SOC需要做大量實驗找出電池OCV與電池SOC之間的對應關系,前期準備工作需測量不同溫度下開路電壓與SOC關系,準備工作繁重。電池存在遲滯效應,需要靜置一個小時或更長時間才能恢復真正電壓。該方法適用于長期靜置離線狀態估計,也可以作為安時積分法或其他算法初始SOC計算,不適合實時電池SOC估算。
③內阻法
在充放電過程中,電池阻抗中的部分參數隨SOC變化而變化,根據該特性可通過內阻進行SOC估算。根據內阻獲取方式可將內阻法分為直流內阻法和交流內阻法。內阻與SOC之間關系受充放電電流、溫度等因素影響,并且測量內阻需要專業設備,測量精度取決于測試設備,測量精度越高,設備成本越高。測量電池內阻時需要斷開負載,不適合電動汽車實時測量,該方法只能應用在特定車型或實驗室做理論研究。
④神經網絡法
在電池SOC估算時可將溫度、電流、電壓等相關數據作為神經網絡輸入,將SOC值作為神經網絡輸出,通過樣本數據訓練,可以得到較為精確的SOC值。采用神經網絡進行SOC估算可以在不清楚電池內部結構下,只要通過足夠多的樣本就可以實現對非線性系統的精確估算。采用神經網絡估算SOC值主要有兩種方法:BP神經網絡法和徑向基函數神經網絡法。這兩種方法在網絡結構中具有高度的相似性,高斯函數用于處理徑向基函數神經網絡中的隱層單元操作。在神經網絡訓練中,徑向基函數神經網絡需要校正神經元之間的權重系數和算術單元的輸出閾值,并且還要校正算術單元的高斯函數的均值和方差,因此計算量大于BP神經網絡,培訓網絡融合需要更多時間。
⑤卡爾曼濾波
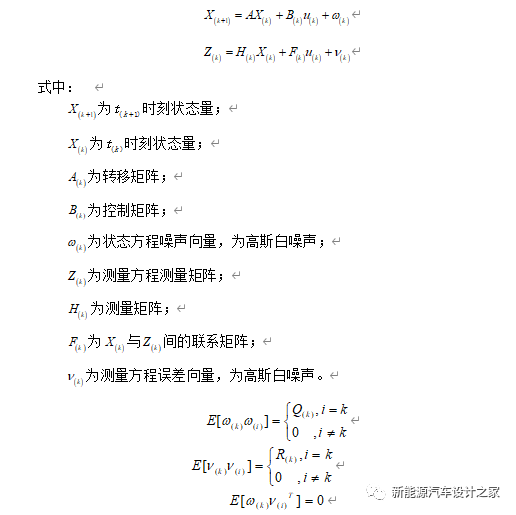
卡爾曼濾波是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。廣泛應用于雷達跟蹤、石油勘探、追蹤導航、無線通訊。數據濾波通過過濾真實數據中的噪聲得到純正數據,是一種數據處理方式。Kalman濾波可在含有已知測量方差的測量噪聲的數據中,進行動態系統狀態估算。Kalman可通過計算機編程方式實現且編程難度較低,能夠對實時采集的數據進行處理,處理數據時占用計算機內存較少,適合在汽車中運用。卡爾曼濾波算法計算公式主要為狀態方程組和測量方程組兩部分,具體公式如下所示:
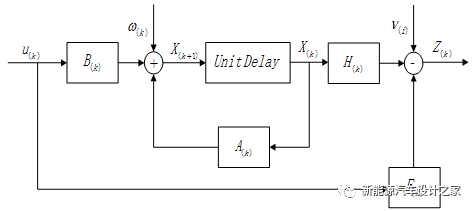
線性Kalman濾波結構如圖1所示。
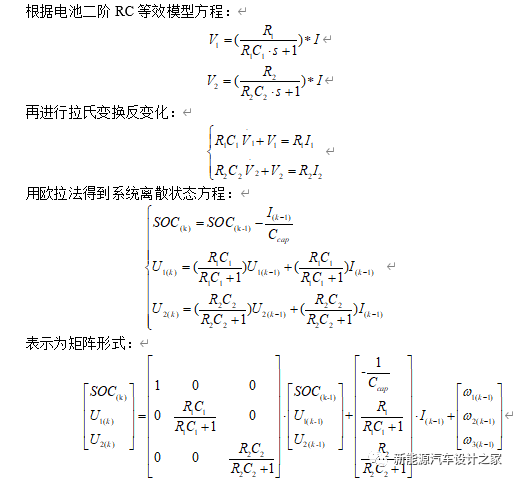
⑥擴展卡爾曼濾波
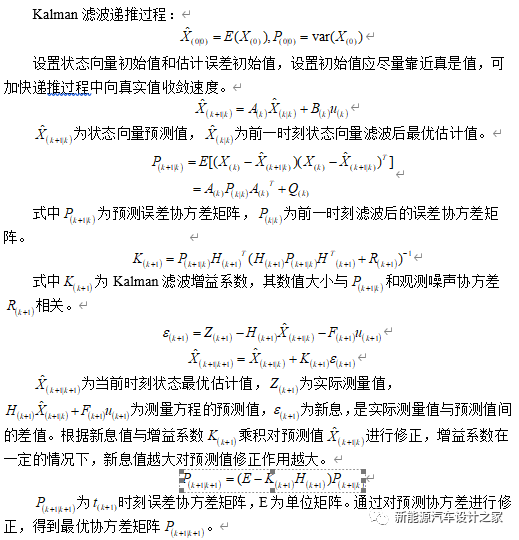
通過Kalman濾波遞推過程可以看出,狀態估計量和觀測量與狀態變量為線性關系,但是電池狀態為非線性關系,使用Kalman濾波估算電池狀態并不適合。擴展卡爾曼濾波算法采用泰勒(Taylor)展開并略去高階項,可將非線性模型近似為線性模型,再通過卡爾曼濾波算法的過程形式完成濾波。
非線性系統的狀態方程與觀測方程可用下面的式子表示:
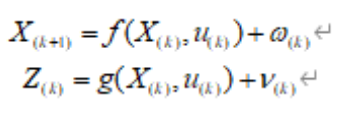
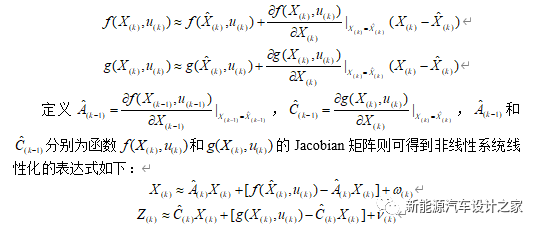
其中和為非線性系統的狀態方程與觀測方程,其余參數與Kalman中相同。為得到遞推計算中所需要的矩陣,在最優估計點附近時,通過一階泰勒展開式對上述方程進行線性化。設在各選取的采樣點時刻可微:
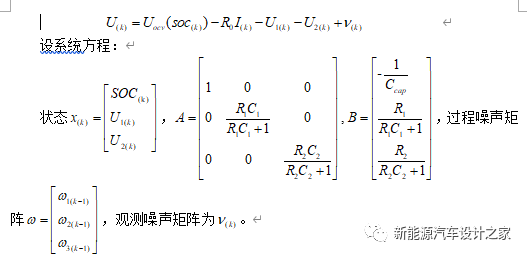
⑦無跡卡爾曼濾波(UKF)
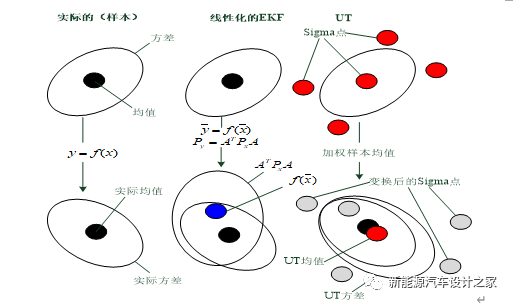
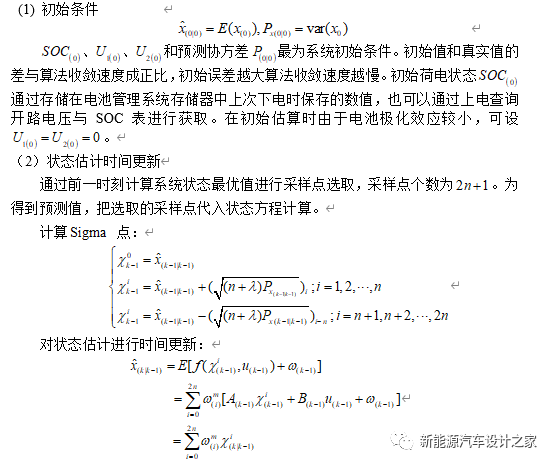
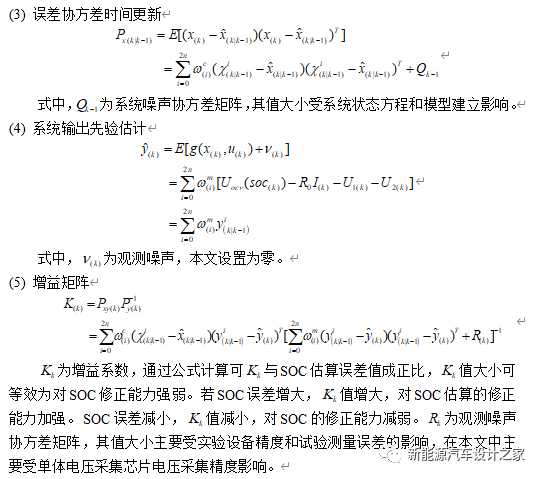
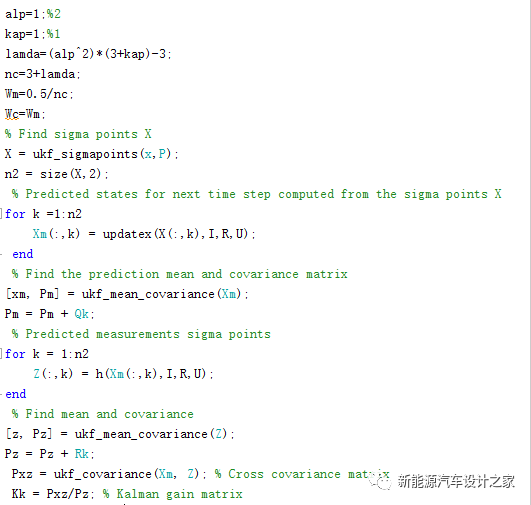
UKF算法的核心是UT變化,是一種計算非線性函數傳輸隨機變量的統計值(均值,方差等)結果的方法。以表征隨機變量概率密度分布通過Sigma點進行表征作為其主要原理。為保證Sigma點被估計量具有相同的概率統計特征,在進行Sigma點選取時要注意其均值和方差與待傳遞量的一致性。為得到系統狀態值和協方差,可以通過對經非線性系統變換的Sigma點進行加權處理。圖2為UT變化原理。
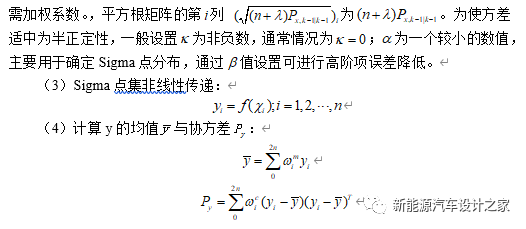
在進行Sigma點選取時應考慮被估計量的統計特性,為得到精確地計算全值,應采用合適的采樣方法。Sigma點采樣方法主要包括對稱采樣、單形采樣、3 階矩偏度采樣等,最常采用的采樣方法為對稱采樣。不管采用對稱采樣法還是采用單形采樣法,的維數與Sigma點到均值之間的距離成正比關系。

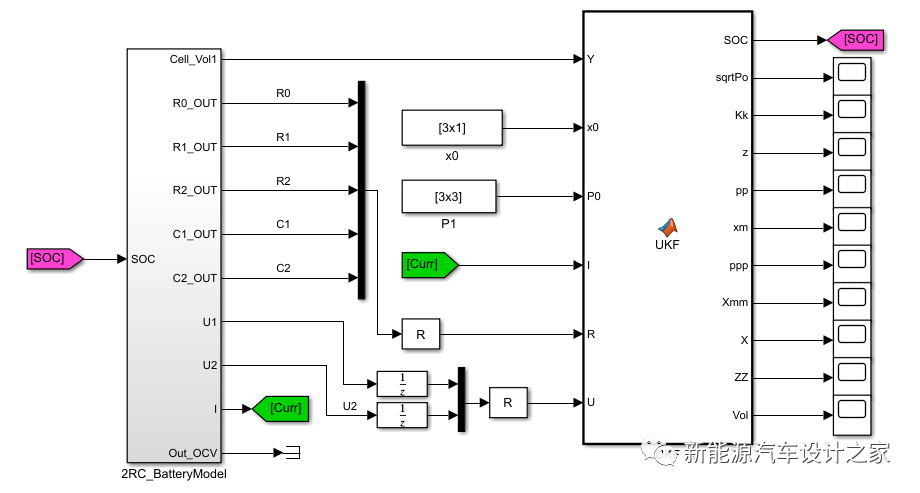
建立電池模型結合無跡卡爾曼濾波算法進行SOC值估算。

模型
本片采用m腳本編寫UKF算法,減少模型搭建時間,工程中還是需要用基礎模塊搭建,易于測試、仿真、代碼生成。
注:文章來源微信公眾號《新能源汽車設計之家》
-
新能源
+關注
關注
26文章
5282瀏覽量
107267 -
電池管理
+關注
關注
27文章
551瀏覽量
42938 -
bms
+關注
關注
106文章
974瀏覽量
65737
發布評論請先 登錄
相關推薦

全新電池管理系統BMS (3串計量芯片) Demo
BMS電池管理系統的主要功能
BMS電池管理系統的特點有哪些
BMS電池管理系統的作用有什么?如何設計電池管理系統 (BMS)







 工商網監
工商網監
評論