 基于高光譜特征的土壤含水量遙感反演方法-萊森光學
基于高光譜特征的土壤含水量遙感反演方法-萊森光學
0引言
隨著遙感技術的廣泛應用,微波、熱紅外和光學遙感估算土壤含水量的潛力也被大家所認可。在微波遙感(5~1000mm)估算土壤含水量與波長后向散射系數有關,其在大范圍的應用中效果明顯,但是不足之處是它的空間分辨率較低,不適用于小尺度以及野外測量;
對于熱紅外遙感(3.5~14μm)監測反演土壤含水量,一般來說,當與能夠提供植被指數的光學傳感器協同使用時, 其估算精度較高,但反演計算過程中涉及多種復雜的導數,反演解算過程較為繁瑣,研究小范圍的土壤含水量情況下不推薦使用該方法,更推薦在大面積情況下使用; 高光譜分辨率的光學遙感(400~2500nm),通常稱為高光譜遙感 ( hyperspectral remote sensing,HRS),由于土壤含水量 θ 與土壤的高光譜反射率 R之間的相關性較大,將其與地面、機載和高空傳感系統結合使用,可以在不同時空尺度上估算出土壤含水量。 因此,HSR被認為是解決上述估計土壤含水量 θ 存在空間分辨率低、適用范圍小等問題上最有前途的遙感技術之一。
土壤含水量與光譜反射率關系
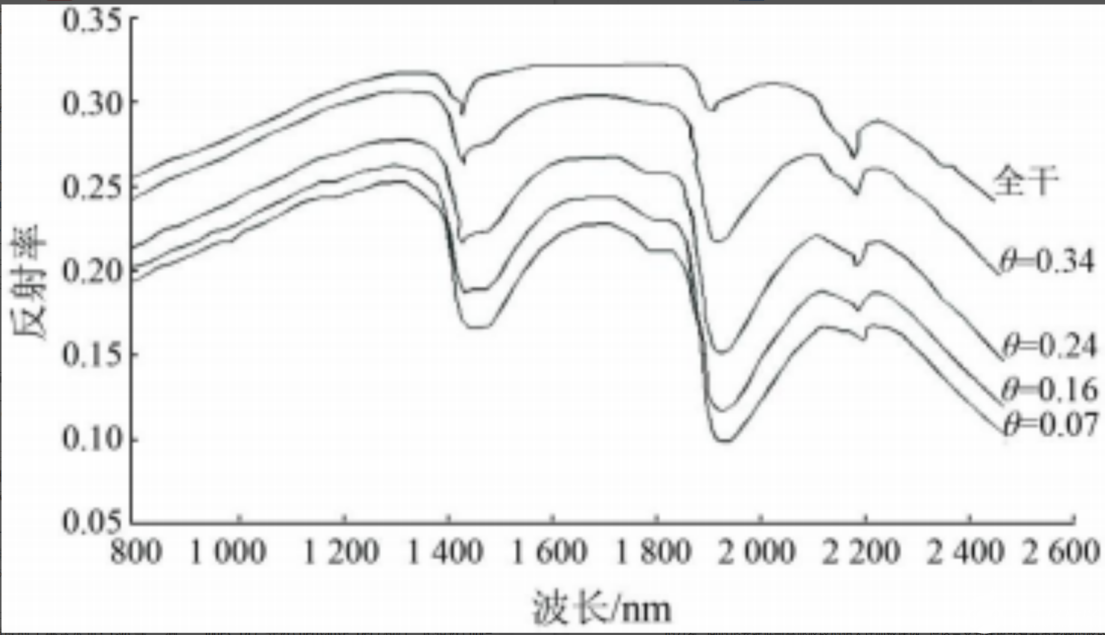
圖 1 θ-R的變化關系
圖1反映的是土壤反射率隨波長的變化關系。從圖1可看出不同波長所對應土壤的反射率不盡相同,在1450nm和1900nm波長附近土壤反射率較低,出現了明顯的波谷,在1300nm和1700nm波長附近土壤反射率達到了一個較高值,出現了較為明顯的波峰。
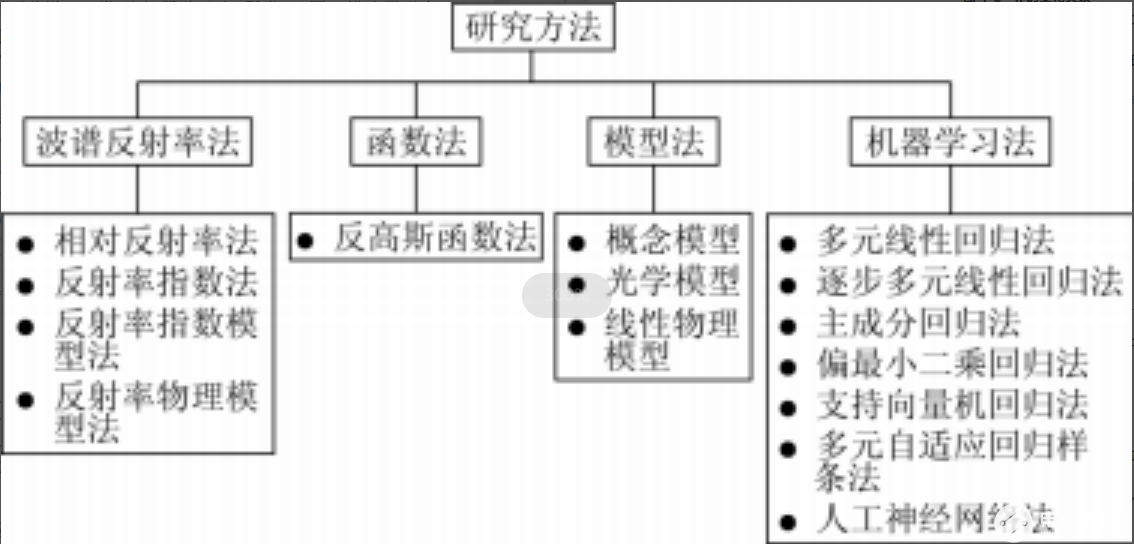
圖2 θ-R關系的不同分類方法
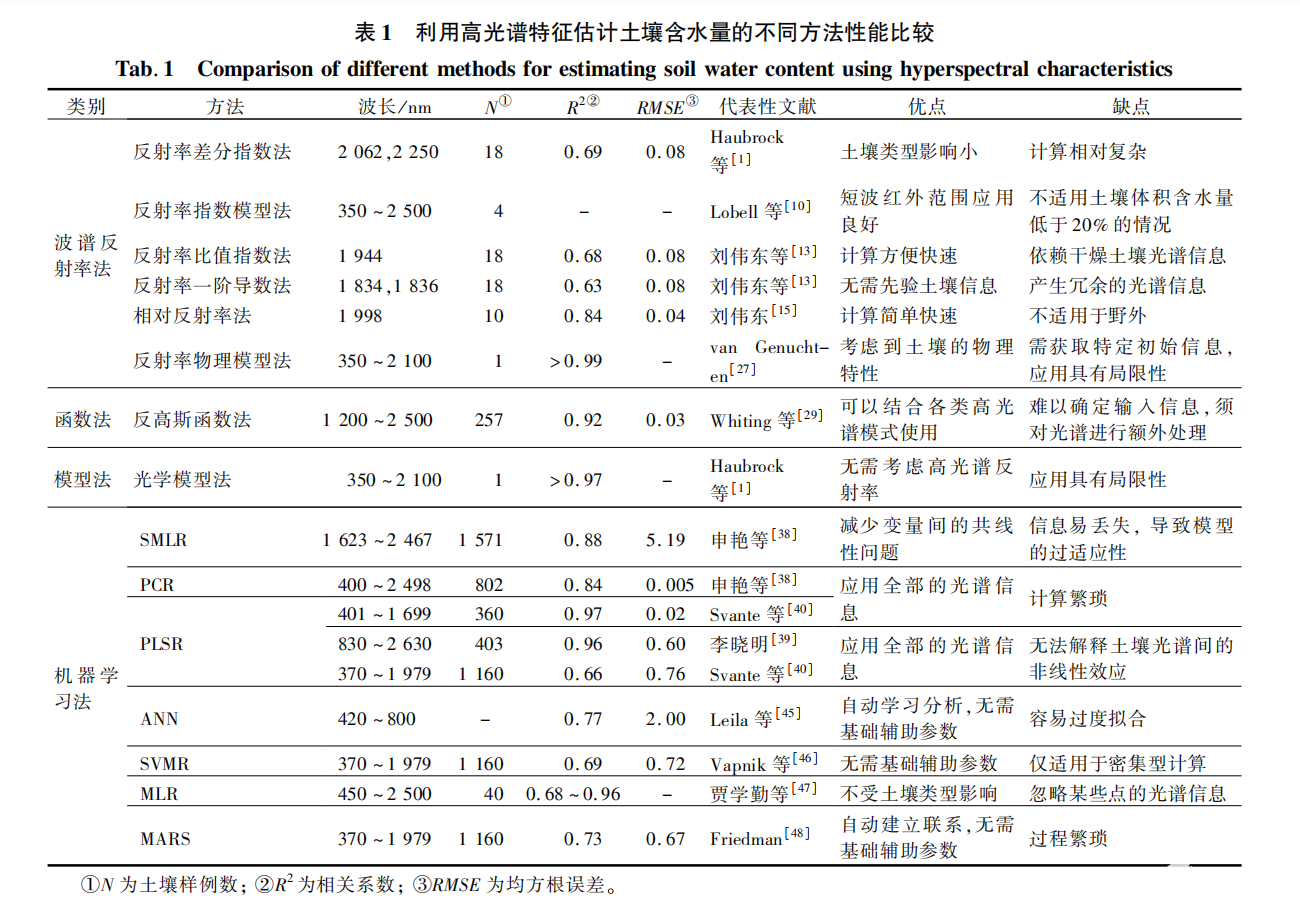
將建立θ-R關系的方法分為以下4類:光譜反射率法(Ⅰ類)、函數法(Ⅱ類)、模型法(Ⅲ類)和機器學習法(Ⅳ類)。 圖2描述了現有θ-R關系的不同分類方法。
波譜反射率法
相對反射率法:
劉偉東等證明了簡單線性和非線性函數估算土壤含水量的效用,并描述了土壤在每個波段的反射率 R 與相對反射率 R*(在非干燥條件下)之間的關系,公式為:
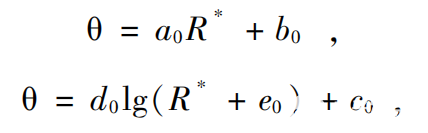
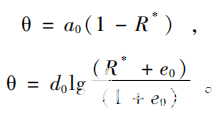
式中 a0 ,b0 ,c0 ,d0 和 e0 為輔助參數。 在低于臨界水平的低濕度條件下,即在干燥條件下(θ =0),R*=1時,上述方程可修改為:
函數法
Whiting等將反高斯函數 g(λ)與土壤光譜反射面相結合來估算土壤含水量,其反射面積A和振幅Z的參數與θ相關聯。當使用短波紅外波長進行計算時,輔助參數與反射面積A高度相關,2800nm左右的波長范圍對其影響較大。 g(λ),A和Z的計算公式分別為:
式中:λ0和 λi分別為光譜反射面中心和拐點處的波長;σ為從光譜反射面區域中心到拐點的距離;erf(*)為誤差函數。
模型法
光學模型:
Nolet等針對小面積濕潤土壤反映出來的土壤反射率的變化很小,因而忽略了該部分造成的影響,并提出了一個基于蘭伯特定律的針對沿海海灘砂礫進行分析的簡單指數模型,公式為:

式中 β為濕潤的海灘砂礫發生散射造成光譜反射率降低的影響因子。
機器學習法
深度學習法包括幾種統計和機器學習方法,即多元線性回歸法( multiple linear regression,MLR)?逐步多元線性回歸法(stepwise multiple linear regres-sion,SMLR)?主成分回歸法(principal component re-gression, PCR)? 偏最小二乘回歸法 ( partial leastsquares regression,PLSR),支持向量機回歸法( sup-port vector machine regression ,SVMR)?多元自適應回歸樣條法 ( multiple adaptive regression spline ,MARS)和人工神經網絡法(artificial neural network,ANN)?
結論及展望
根據不同土壤光譜反射率與土壤含水量之間的關系,本文將 θ -R 研究方法分成4 類,并從精度、復雜性、輔助數據要求、不同遙感模式下的可操作性以及對土壤類型的依賴性等方面分析了它們的潛力和局限性。 大多數方法在試驗區范圍內能有效證明 θ -R 之間的關系,但方法的遷移性和擴展性還需要更多的實驗驗證。 其中反射率指數法(除了差分法和導數法)、函數法和模型法在計算上有優勢,但它們需要獲得先驗的土壤信息。 在沒有土壤信息的情況下,需要通過使用全部光譜反射率來估算土壤含水量,此時機器學習法更具優勢,但是也取決于機器學習法在數據建模中使用的光譜數量的多少,數量過多則會影響計算效率。
歡迎關注公眾號:萊森光學,了解更多光譜知識。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯黃昊宇
-
遙感
+關注
關注
0文章
244瀏覽量
16792 -
高光譜
+關注
關注
0文章
327瀏覽量
9916
發布評論請先 登錄
相關推薦
一種微帶諧振式含水量測量傳感器設計
一款土壤含水量檢測電路相關資料分享
土樣含水量快速測定傳感技術研究
土壤含水量快速測定儀是什么,它的應用優勢是什么
土壤含水量快速測定儀的用途以及使用方法的介紹
土壤含水量測定儀是什么,它的作用又是什么
關于土壤含水量快速測定儀與其他方法的對比
淺談土壤含水量測定儀在耕地土壤水分測定中的應用
土壤含水量測定儀器的性能和適用范圍的介紹
土壤含水量測定儀器的使用方法
土壤含水量測定儀器的性能及技術參數
為什么要測量土壤含水量,土壤水分測量的方法

黃河三角洲土壤含水量狀況的高光譜估測與遙感反演





 工商網監
工商網監
評論