 【產品應用】用 AWTK 和 AWPLC 快速開發嵌入式應用程序 (10)- 簡易跑步機
【產品應用】用 AWTK 和 AWPLC 快速開發嵌入式應用程序 (10)- 簡易跑步機
 背景
背景AWTK全稱 Toolkit AnyWhere,是 ZLG 開發的開源 GUI 引擎,旨在為嵌入式系統、WEB、各種小程序、手機和 PC 打造的通用 GUI 引擎,為用戶提供一個功能強大、高效可靠、簡單易用、可輕松做出炫酷效果的 GUI 引擎。
簡介
運動控制是 PLC 重要的應用領域,本文以一個簡化版的跑步機為例,介紹一下在 AWPLC 中,使用運動控制塊的基本方法。
對于單軸運動控制,從控制的方法來說,可以分為 3 類:
位置控制。讓軸轉動指定的位置;
速度控制。讓軸以指定的速度轉動;
力矩控制。讓軸以指定的力矩轉動。
在 PLCOpen 的運動控制功能塊中,對以上控制方法都有支持。跑步機是一個典型的速度控制類應用,常見速度類控制應用也很多,比如抽油煙機、洗衣機、扶手電梯和傳送帶等。速度控制是最簡單的控制方式,使用 MC_MoveVelocity 這個功能塊就可以了,它讓軸以指定的速度轉動,其圖形表示如下:

*這是一個標準的功能塊,具體用法可以參考 PLCOpen 的文檔,網上也有很多文章介紹。
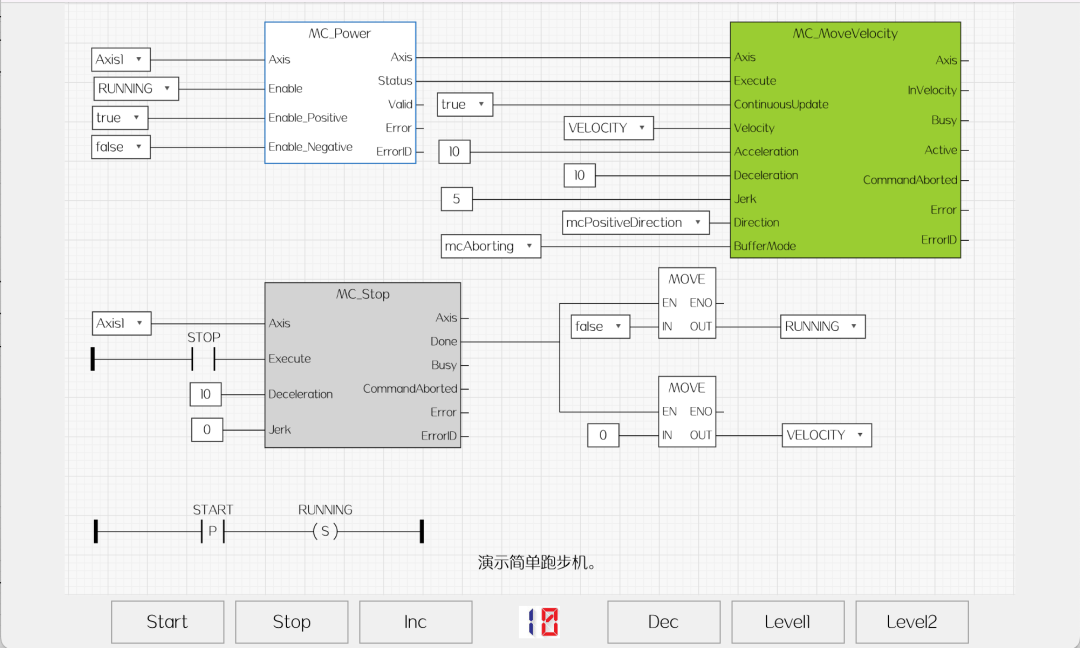
6 個按鈕。 ● 啟動按鈕。 ●停止按鈕。 ●增加速度按鈕。 ●減小速度按鈕。 ●1 檔按鈕。 ●2 檔按鈕。 數碼管。用來顯示當前的速度。 伺服電機。因為沒有真實硬件,找了一個二手伺服電機,看起來比較 Low,反正能轉起來吧,下一步會支持 ZLG 專業的運動控制器。運動控制算法用的一個開源的庫(實現不太完整),以后會集成 ZLG 算法專家提供的運動控制庫(也可以集成第三方商業運動控制算法)。
程序界面如下所示(為了方便理解,我們把功能塊圖也放到了界面上):
2. 軟件模擬
按鈕和數碼管都用軟件模擬。
PLC程序
運動控制的功能塊,參數通常比較多,占地比較大,一個屏幕放不下幾個。在這個例子中,我們把它放到兩個程序中:
主程序程序負責運動控制和開關機。
速度調節和檔位切換。
* 注意:實際速度與硬件選型有關,需要對電機控制器的參數進行配置,這里為了簡化,把速度設置到0-100之間。

點擊 START 按鈕。將狀態 RUNNING 設置為 TRUE。 RUNNING 為 TRUE 會激活功能塊 MC_Power 啟動電機。 電機啟動完成,MC_Power 的 Status 輸出 TRUE,MC_MoveVelocity 開始執行,設置初始速度。
關機過程:
點擊 STOP 按鈕,MC_Stop 開始執行。 停機完成,MC_Stop 的 Done 輸出 TRUE,此時將狀態 RUNNING 設置為 FALSE,并將速度清零。
注意事項:
MC_Power 的參數 Enable_Negative 設置為 false,禁止反轉。
MC_MoveVelocity 的 ContinouseUpdate 設置為 true,否則速度調節無效。

增加速度:
點擊 INC 按鈕。將速度增加 5,如果速度大于 100,取 100,設置到速度變量 VELOCITY。
減小速度:
點擊 DEC 按鈕。將速度減小 5,如果速度小于0,取0,設置到速度變量 VELOCITY。
切換到 1 檔:
將 40設置到速度變量 VELOCITY。
切換到 2 檔:
將 80設置到速度變量 VELOCITY。
用戶界面
應用程序不需要編程,用 AWTK Designer 設計好界面,將控件與模型進行綁定即可。下面介紹一下控件與模型的綁定方法。這里用的是 AWTK-MVVM,數據綁定規則與 AWTK-MVVM 是完全一樣的。
模型可以用 io、plc 或者 io+plc。io 可以用來綁定 IO 變量,plc 可以用來綁定程序 PLC 內部變量。
示例:
由于符號%在程序里具有特殊功能,所以在綁定 IO 變量時,把%換成_。比如:將%QX0.0寫作_QX0.0。
*由此可見,在 AWPLC 功能塊圖的幫助下,我們不要寫 C 代碼或腳本,即可完成應用程序的開發。AWPLC 用低代碼降低了開發的門檻,提高了開發的效率。AWPLC 等您來玩!
【版權聲明】本文為ZLG開發者社區用戶原創內容,未經授權不得轉載。歡迎更多用戶到社區交流互動、創作博文,一經采用,可獲得百元京東E卡。









-
致遠電子
+關注
關注
13文章
405瀏覽量
31277
原文標題:【產品應用】用 AWTK 和 AWPLC 快速開發嵌入式應用程序 (10)- 簡易跑步機
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【AWTK使用經驗】如何使用系統輸入法與開啟最大化窗口功能

霍爾開關給跑步機帶來精準感應
跑步機的心聲——N8900藍牙音頻芯片賦予智能健身新維度

EsDA,一站式嵌入式軟件
七大嵌入式GUI盤點

【AWTK最新動態】AWTK 1.8版本發布
大小鼠也需要跑步機——ZL-013小動物實驗跑步機
深度詳解嵌入式系統專用輕量級框架設計

【插針機HMI開發】用AWTK開發人機界面
【從0開始創建AWTK應用程序】編譯應用到RTOS平臺
【從0開始創建AWTK應用程序】編譯應用到嵌入式Linux平臺運行
【從0開始創建AWTK應用程序】創建應用程序并在模擬器運行





 工商網監
工商網監
評論