") 常見的交流感應(yīng)電機(jī)故障及常見的交流感應(yīng)電機(jī)故障
常見的交流感應(yīng)電機(jī)故障及常見的交流感應(yīng)電機(jī)故障
作者:Richard Anslow and Chris Murphy
介紹
本系列文章的第1部分“如何為無線狀態(tài)監(jiān)控系統(tǒng)選擇最佳MEMS傳感器——第1部分”介紹了Voyager無線CbM模塊,以及使用MEMS加速度計無線測量振動時需要注意的一些關(guān)鍵功能。第2部分將重點描述常見的交流感應(yīng)電機(jī)(ACIM)故障,并詳細(xì)介紹如何識別和診斷特定的故障類型,以及三軸MEMS加速度計相對于其他振動傳感器的優(yōu)勢。
電機(jī)和資產(chǎn)故障對制造的影響
當(dāng)工廠中的關(guān)鍵電機(jī)意外發(fā)生故障時,生產(chǎn)就會停止。如果需要更換特定部件甚至整個電機(jī),則可能會產(chǎn)生較長的交貨時間。計劃外停機(jī)的成本是計劃內(nèi)停機(jī)的 10 倍。1每年,工廠的平均停機(jī)時間約為 800 小時。1這些信息的最終結(jié)果是,在無線技術(shù)加上MEMS傳感器技術(shù)的最新進(jìn)展使工廠和維護(hù)經(jīng)理能夠快速部署高效的無線CbM系統(tǒng)以阻止計劃外停機(jī)造成的損失的時候,CbM正在快速增長。雖然三軸MEMS傳感器可能是這場無線革命的核心,但對于這些振動傳感器究竟能夠做什么,仍然存在一些困惑。
三軸MEMS加速度計在振動傳感器頻譜中的什么位置?
為了最大限度地減少生產(chǎn)停機(jī)時間,必須了解電機(jī)內(nèi)的潛在故障,以便準(zhǔn)備好處理它們。雖然專為與壓電振動傳感器相媲美而設(shè)計的單軸模擬輸出MEMS傳感器最近在診斷故障方面實現(xiàn)了與低電平/中級壓電傳感器相似的性能水平,但本文更側(cè)重于三軸MEMS加速度計中更常見的窄帶寬監(jiān)控(0 Hz至1 kHz)。并非每個 CbM 部署都專注于診斷甚至預(yù)測資產(chǎn)故障。在某些資產(chǎn)中,在稍后階段檢測故障可能是可以接受的,因此,傳感器的性能和成本可以稍微低一些。這就是三軸MEMS加速度計可以提供高性能(低至25 μg√Hz)和低成本替代方案的地方,如圖1所示。與ADXL356和壓電傳感器PZT 8相比,成本增加了20×而兩者之間的高性能、低成本MEMS替代方案很少。預(yù)計未來幾年該領(lǐng)域?qū)⒊霈F(xiàn)顯著增長。

圖1.用于CbM的三軸MEMS傳感器與高性能MEMS和IEPE傳感器的比較。
為什么在CbM應(yīng)用中需要檢測低于10 Hz/600 rpm的振動?
低頻CbM振動測量通常被認(rèn)為在0.1 Hz至10 Hz或6 rpm至600 rpm帶寬范圍內(nèi)。低頻應(yīng)用比一般機(jī)械監(jiān)控更復(fù)雜,因為低于 10 Hz (600 rpm) 的運動產(chǎn)生的振動非常小。雖然眾所周知,使用高靈敏度傳感器測量高頻振動數(shù)據(jù)有助于檢測某些故障(軸承剝落、齒輪嚙合和泵氣蝕),并深入了解資產(chǎn)的剩余使用壽命,但應(yīng)該注意的是,在接近直流或 0 Hz 時也可以獲得重要信息。因此,渦流位移或電渦流探頭等特殊用途非接觸式傳感器可用于在0 Hz甚至高頻振動下以高精度檢測電機(jī)軸位移或錯位,但與MEMS相比,它們在某些應(yīng)用中可能難以定位,并且通常更昂貴。MEMS絕不是為了取代渦流傳感器而設(shè)計的,渦流傳感器可以在極端條件下檢測0.1 nm以下的位移。3然而,對于希望實現(xiàn)低成本CbM系統(tǒng)甚至可以檢測低至0 Hz加速度的無線系統(tǒng)的設(shè)計人員來說,MEMS加速度計可以提供一種經(jīng)濟(jì)高效的替代方案。
造紙和紙漿加工、食品和飲料、石油和天然氣、風(fēng)力渦輪機(jī)發(fā)電以及金屬加工和采礦等行業(yè)都使用速度低于 1 Hz 的極低速電機(jī);因此,振動傳感器能夠檢測這些基本轉(zhuǎn)速至關(guān)重要,尤其是在嘗試檢測不平衡和未對準(zhǔn)故障時。可以使用頻率響應(yīng)從0.1 Hz開始的專用低頻IEPE或壓電傳感器,而頻率響應(yīng)從2 Hz到5 Hz的通用傳感器更為常見。與壓電傳感器相比,MEMS的一個關(guān)鍵優(yōu)勢是它們可以檢測低至0 Hz的傾斜信息。這無法在模態(tài)激振器上進(jìn)行測試,因此測量限制為0.01 Hz,如圖2所示。應(yīng)該注意的是,壓電傳感器的價格要高得多,并且正如預(yù)期的那樣,從略低于0.1 Hz到0.1 Hz具有更好的噪聲性能,但低于此值,MEMS傳感器在低至0.01 Hz和0 Hz時具有更好的噪聲性能。這種低頻性能是多軸MEMS加速度計所有軸的特性,有可能使維護(hù)和設(shè)施工程師進(jìn)一步了解其資產(chǎn)的低頻動態(tài),以前即使使用高度專業(yè)化的壓電傳感器也無法實現(xiàn)。

圖2.MEMS與壓電低頻響應(yīng)
通常,建議加速度計的頻率響應(yīng)應(yīng)為軸承監(jiān)控軸轉(zhuǎn)速的 40 至 50 倍,風(fēng)扇和變速箱的葉片通過頻率最高為 5 倍。4造紙機(jī)輥筒、螺旋輸送機(jī)、碎石設(shè)備等超慢速機(jī)械均采用滾筒元件軸承。某些機(jī)器的轉(zhuǎn)速可能低至 0.2 Hz 或 12 rpm。51×、2× 和 3× rpm 的速度信息對于檢測和診斷不平衡、錯位和機(jī)械松動至關(guān)重要。沖壓機(jī)曲柄軸承的運行速度可低至 0.18 Hz 或 11 rpm。5對于無線CbM系統(tǒng),渦流傳感器由于其高功耗而尚不可行。MEMS加速度計提供基于壓電加速度計和渦流探頭的多模態(tài)振動和位移測量的低性能、低成本替代方案。
使用Voyagers三軸MEMS加速度計檢測軟腳或傾斜問題
ACIM的尺寸和功率可能會有所不同,一些較大的電機(jī)需要剛性基礎(chǔ),典型的應(yīng)用是工業(yè)泵,其中動力通過直接連接或某些耦合元件從軸傳遞到泵。這些連接的錯位可以是徑向的、軸向的或切向的。為了保持穩(wěn)定的對準(zhǔn),必須通過將泵固定在堅實的地基上來最大限度地減少振動。具有均勻剛度的穩(wěn)定剛性基礎(chǔ)可以通過減少振動來提高可靠性,從而有效延長電機(jī)的使用壽命。工業(yè)泵通常直接用螺栓固定在機(jī)加工底板上,隨附的設(shè)備對齊并固定在同一底板上。然后將組件粘附在混凝土基礎(chǔ)上。
如果基礎(chǔ)過于靈活或不平整,則可能導(dǎo)致對齊問題、振動幅度增加,并最終導(dǎo)致計劃外停機(jī)。對準(zhǔn)測試是在電機(jī)安裝時和運行初始階段、維護(hù)或維修工作后以及定期維護(hù)期間進(jìn)行的。可以使用各種機(jī)械設(shè)備來檢測未對準(zhǔn),例如塞尺、卡尺和千分表。激光對準(zhǔn)系統(tǒng)等替代工具廣泛用于對準(zhǔn)電機(jī)軸及其驅(qū)動的設(shè)備。
一旦運行,例行維護(hù)檢查將尋找電機(jī)與基礎(chǔ)對齊或電機(jī)安裝的任何異常,但這些可能相隔數(shù)月。當(dāng)前的維護(hù)制度依靠振動數(shù)據(jù)來檢測不平衡和不對中,并且?guī)资陙硪驯蛔C明是成功的。在低g條件下,MEMS三軸傳感器可以連續(xù)監(jiān)測和檢測振動和傾斜變化,當(dāng)它們結(jié)合在一起時,可以為測量和潛在的早期故障檢測提供額外的信心。
MEMS加速度計如何測量傾斜度?
如圖4所示,當(dāng)單軸加速度計平放在表面上時,其敏感軸垂直于重力,因此輸出0 g。當(dāng)傳感器沿重力方向傾斜時,它會檢測到由于 1 g 場引起的加速度。圖4中曲線的斜率是器件的靈敏度。請注意,靈敏度隨著地平線和 x 軸之間的角度增加而降低。

圖4.MEMS加速度計,其敏感軸垂直于1 g。
在圖 5 中,我們可以看到 Voyager 模塊測量重力或靜態(tài)加速度引起的加速度。模塊直立放置,z 軸加速度為 1 g,x 軸和 y 軸加速度為 0 g。當(dāng)Voyager模塊在x軸上傾斜4°(22秒)時,可以很容易地觀察到傾斜,如圖5所示,作為直流偏移。將測量的加速度轉(zhuǎn)換為傾斜角度涉及取測量的加速度正弦的反正弦-10.07 g = 4°。

圖5.旅行者模塊在靜態(tài)條件下檢測 4° 的傾斜度。
在檢測CbM應(yīng)用振動下的傾斜時會出現(xiàn)幾個問題。首先,與靜態(tài)條件相比,它更困難,需要更多的考慮。其次,傾斜或傾斜應(yīng)用通常會限制帶寬以降低噪聲(<100 Hz),而在CbM中,更寬的帶寬(1 kHz或更高)則更受歡迎。如圖6所示,檢測資產(chǎn)或電機(jī)傾斜的極端范圍可能限制在±5°或±87 m g,在可能存在高g振動的情況下,這可以被認(rèn)為是一個挑戰(zhàn)。

圖6.靜態(tài)條件下的輸出加速度與傾斜角的關(guān)系。
將三角函數(shù)應(yīng)用于測量的加速度可以很容易地產(chǎn)生傾斜角度。但是,如果檢測到?jīng)_擊事件或振動,則可能會影響傾斜測量,如圖7所示,其中2 g的沖擊事件產(chǎn)生的傾斜值為82°。

圖7.存在高g振動的傾角數(shù)據(jù)和平均值數(shù)據(jù)。
雖然瞬間沖擊、沖擊或振動不會影響電機(jī)的實際傾斜或傾斜,但從加速到傾斜的轉(zhuǎn)換過程將這些數(shù)據(jù)顯示為實際傾斜值,如圖7所示。平均數(shù)據(jù)或生成平均值是消除此類異常的常用方法,這是 Voyager 平臺 GUI 的一個功能,如圖 8 所示。

圖8.三個軸上的平均振動。
圖 8 中的測量結(jié)果顯示電機(jī)從 1 s 開始運行,在大約 18 s 時施加 4° 傾斜。雖然在 y 軸和 z 軸上可以觀察到一些變化,但 x 軸可以清楚地檢測到傾斜。這是 3 軸振動傳感器的主要優(yōu)勢之一,在這種情況下,它主要安裝在 z 軸上,然后是 y 軸上檢測振動。x 軸可以更準(zhǔn)確地檢測傾斜,因為它不在軸上進(jìn)行振動測量。雖然在動態(tài)條件下很難高精度地確定確切的傾斜量,但對電機(jī)和允許的傾斜范圍進(jìn)行簡單的表征可以產(chǎn)生良好的結(jié)果。圖 8 中所示的傾斜度計算為罪惡-1當(dāng)Z軸測量3 g,y軸測量1.3 g和x軸測量0.2 g時,0.07 g = 4°,如圖9所示。旅行者號模塊的靜態(tài)傾斜分辨率約為0.2°。

圖9.時域圖顯示了在三個軸上測量的振動。
在設(shè)計能夠檢測傾斜的基于MEMS的無線振動模塊時,需要考慮的另一個關(guān)鍵數(shù)據(jù)手冊參數(shù)是g范圍。如果MEMS傳感器暴露于超過g范圍的振動中,則可能發(fā)生削波,這表現(xiàn)為直流偏移,從而增加任何由此產(chǎn)生的傾斜測量的誤差。這意味著,在選擇MEMS傳感器來檢測振動情況下的傾斜時,必須確保g范圍具有高于任何潛在沖擊、沖擊或振動事件幅度的裕量,以避免這種偏移源。

圖 10.加速度計中的振動校正,由于不對稱削波,滿量程范圍為 ±2 g。
使用 Voyager 進(jìn)行故障檢測
Voyager三軸振動測量解決方案能夠拾取故障并提供見解,這是單軸解決方案無法實現(xiàn)的。基于振動的故障檢測是一個復(fù)雜的過程,其中許多數(shù)學(xué)模型甚至人工智能都被用來診斷故障。與單軸傳感器相比,基于旅行者的結(jié)果旨在展示如何使用3軸測量來獲得額外的信心,并提供更可靠的方法來診斷特定故障。
圖11顯示了SpectraQuest精簡版鉆機(jī),它提供了在模擬真實世界機(jī)器的設(shè)備上執(zhí)行受控實驗的能力。可以模擬對不平衡載荷、翹起或偏心轉(zhuǎn)子、彎曲轉(zhuǎn)子軸和損壞的軸承/軸承座引起的故障特征的深入了解,以便更好地了解振動特征。Voyager無線微塵安裝在外殼上,如圖11所示,位置優(yōu)越,可以測量徑向(z和y方向)振動幅度,以及軸和載荷方向的軸向振動。

圖 11.SpectraQuest lite rig.
不平衡和錯位
不平衡和未對準(zhǔn)被歸為兩個故障特征,它們通常出現(xiàn)在相同的FFT分析中。電機(jī)轉(zhuǎn)子重心周圍的不均勻分布會導(dǎo)致不平衡,從而轉(zhuǎn)子振動并給軸承帶來額外的應(yīng)力。這些振動會導(dǎo)致軸承過度磨損,進(jìn)而產(chǎn)生更多噪音,如果不維護(hù),可能導(dǎo)致軸承甚至整個電機(jī)故障。
當(dāng)轉(zhuǎn)子、聯(lián)軸器元件和從動軸未居中時,會發(fā)生轉(zhuǎn)子不對中。錯位可以是有角度的、平行的或兩者的組合。未對準(zhǔn)引起的最常見振動是 1× rpm 頻率。2× rpm 頻率有可能超過 1× 頻率,但這并不常見。應(yīng)該注意的是,彎曲的軸和不平衡也會在 1× rpm 的頻率下產(chǎn)生振動。
不平衡負(fù)載
如果與基線背景振動噪聲相比,旋轉(zhuǎn)速率(1×)處的振動幅度增加,則系統(tǒng)可能不平衡。為了模擬不平衡,在SpectraQuest鉆機(jī)軸上放置了一個末端質(zhì)量增加的負(fù)載。該系統(tǒng)以 3000 rpm 的速度運行,并增加了 5 kg 負(fù)載。圖14顯示,與預(yù)期的基線振動相比,z徑向方向的1×明顯增加。圖 15 顯示了跨 x、y 和 z 軸收集的振動幅度的 FFT 分析。y和z徑向方向的1×明顯增加,但在x軸方向上9×和10×旋轉(zhuǎn)速率下的振動幅度也明顯增加,這是單軸傳感器無法拾取的。

圖 14.在 3000 rpm 負(fù)載下進(jìn)行不平衡 FFT 分析,Z 軸與基線相比。

圖 15.在 3000 rpm 和 5 kg 負(fù)載下進(jìn)行不平衡 FFT 分析。
翹起轉(zhuǎn)子
圖16顯示了添加到SpectraQuest鉆機(jī)的翹起轉(zhuǎn)子(偏離軸0.5°)的FFT分析。頻譜顯示,在1×旋轉(zhuǎn)速率下振動幅度大幅增加,但在軸向諧波3×、4×、5×、6×、7×、8×、9×和10×處振動幅度也重復(fù)增加。與不平衡負(fù)載一樣,翹起的轉(zhuǎn)子在軸向上顯示故障特征,這是使用單軸振動傳感器無法識別的。

圖 16.在 3000 rpm 下進(jìn)行翹起轉(zhuǎn)子 FFT 分析,無負(fù)載且有一個不平衡權(quán)重。
偏心轉(zhuǎn)子
圖17顯示了添加到SpectraQuest鉆機(jī)的偏心轉(zhuǎn)子的FFT分析。頻譜顯示1×一次諧波大幅增加,表明徑向(z)方向不平衡,但軸向3×次諧波也大幅增加,表明未對準(zhǔn)。6,73軸傳感器將捕獲由于偏心轉(zhuǎn)子缺陷引起的不對中和不平衡,而單軸傳感器解決方案顯然會錯過這一點。

圖 17.在 3000 rpm 無負(fù)載下進(jìn)行偏心轉(zhuǎn)子 FFT 分析。
彎曲軸
圖18顯示了添加到SpectraQuest鉆機(jī)的彎曲軸的FFT分析。頻譜顯示1×一次諧波大幅增加,表明徑向(z)和(y)方向不平衡,但軸向3×次諧波也大幅增加,表明未對準(zhǔn)。y方向上1×的額外峰值有助于區(qū)分彎曲軸和偏心轉(zhuǎn)子模擬故障。3軸傳感器將捕獲由于軸彎曲引起的不對中和不平衡,而單軸傳感器解決方案顯然會錯過這一點。

圖 18.在 3000 rpm 下無負(fù)載的彎曲軸 FFT 分析。
表 1 總結(jié)了最常見的機(jī)器故障,這些故障以低頻率出現(xiàn)。
軸承缺陷
根據(jù)軸承幾何形狀,軸承缺陷有幾種基本的計算分類。內(nèi)滾珠通頻 (BPFI) 和外滾珠通頻 (BPFO) 是滾動體滾動穿過軸承外圈或內(nèi)圈缺陷時產(chǎn)生的頻率。
傳球頻率內(nèi)
內(nèi)圈有缺陷的軸承被安裝到SpectraQuest鉆機(jī)上,軸和載荷通過有缺陷的軸承箱牢固地連接。BPFI 可以使用以下公式計算

其中F是頻率,N是球數(shù),B是球直徑,θ是接觸角,P是節(jié)距直徑。對于SpectraQuest鉆機(jī),用戶手冊為您提供了計算。基于5/8“轉(zhuǎn)子軸承中使用的八個滾動體,滾動體直徑為0.3125”,節(jié)距直徑為1.318“,BPFI計算為基本旋轉(zhuǎn)速率4.95×。
圖19顯示了SpectraQuest鉆機(jī)上軸承缺陷內(nèi)圈故障的Voyager傳感器FFT分析。BPFI 在 y 軸(徑向)上以大約 250 Hz (~4.95×) 的頻率拾取。值得注意的是,這也是在z徑向軸上,但振動幅度沒有那么大和明顯。

圖 19.BPFI FFT 分析,轉(zhuǎn)速為 3000 rpm,負(fù)載為 5 kg。
傳球頻率外
外圈有缺陷的軸承被安裝到SpectraQuest鉆機(jī)上,軸和載荷牢固地通過有缺陷的軸承箱連接。BPFO 可以使用以下公式計算:

對于SpectraQuest鉆機(jī),用戶手冊為您提供了計算。基于5/8“轉(zhuǎn)子軸承中使用的八個滾動體,滾動體直徑為0.3125”,節(jié)距直徑為1.318“,BPFO按基本轉(zhuǎn)速3.048×計算。
圖20顯示了SpectraQuest鉆機(jī)上軸承缺陷外圈故障的Voyager傳感器FFT分析。BPFO 在 y 和 z 徑向軸上以大約 150 Hz (~3.048×) 的頻率拾取。值得注意的是,與4.95×BPFI估計特征相比,該缺陷在BPFO 3.048×估計特征處并沒有顯示出很大的振幅。

圖 20.BPFO FFT 分析,轉(zhuǎn)速為 3000 rpm,負(fù)載為 5 kg。
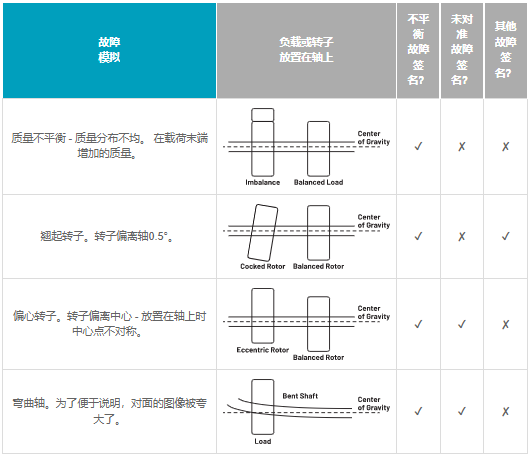
診斷故障:如何在算法中使用故障簽名
表2顯示,三軸Voyager振動傳感器拾取軸向的故障特征,可用于區(qū)分特定故障。例如,偏心和翹起轉(zhuǎn)子故障都會導(dǎo)致系統(tǒng)旋轉(zhuǎn)速率(1×)下的振動幅度大幅增加。然而,在軸向方向上,偏心轉(zhuǎn)子僅顯示 3× 次諧波增加,但翹起轉(zhuǎn)子顯示 3×、4× 等高達(dá) 10× 次諧波的增加。頻率諧波中的這些簡單模式可用于算法中,以區(qū)分兩個故障。Voyager三軸解決方案提供了單軸解決方案顯然無法實現(xiàn)的洞察力。
| 軸上的故障特征和經(jīng)常發(fā)生的故障頻率(基本旋轉(zhuǎn)速率的 1× 或倍數(shù)) | |||
| 故障 |
Z 軸 (徑向 - 垂直) |
Y 軸 (徑向 - 水平) |
X 軸(軸 向) |
| 不平衡負(fù)載 | 1× | 1× | 9×、10× |
| 偏心轉(zhuǎn)子 | 1× | 3× | |
| 翹起轉(zhuǎn)子 | 1× | 3×, 4×, 5×, 6×, 7×, 8×, 9×, 10× | |
| 彎曲軸 | 1× | 1× | 3× |
| BPFO(外圈缺陷上的軸承滾動) | 3× (BPFO), 4× | 3× (BPFO), 4× | |
| BPFI(軸承在內(nèi)圈缺陷上滾動) | 1× | 5× (BPFI) | |
另一個例子是區(qū)分不平衡負(fù)載和彎曲軸的能力。不平衡的負(fù)載和彎曲的軸都會導(dǎo)致系統(tǒng)旋轉(zhuǎn)速率(1×)下的振動幅度增加。這 1× 的增加將呈放射狀發(fā)生(在垂直和水平方向上)。但是,在軸向上,不平衡的負(fù)載將導(dǎo)致9×和10×諧波的增加,但相比之下,彎曲的軸將顯示3×諧波(未對準(zhǔn)特征)的增加。
如前所述,彎曲軸和偏心轉(zhuǎn)子缺陷可以通過彎曲軸的徑向(y)方向的大幅增加來區(qū)分,這在偏心轉(zhuǎn)子測試中不存在。
對于軸承故障,Voyager三軸解決方案在徑向水平(y)方向上拾取BPFI,但不拾取垂直徑向方向(z)的BPFI。如果使用單軸解決方案,則不會檢測到此軸承內(nèi)圈故障,除非用戶足夠幸運地正確猜測振幅最大的軸。
結(jié)論
MEMS功能的最新進(jìn)展使其在CbM中的使用迅速增加,但其功能仍然存在一些模糊性,這些功能差異極大。本文概述了適用于CbM的三軸MEMS傳感器與更高性能的單軸MEMS和壓電/ IEPE傳感器的功能,以闡明不同傳感器的功能。雖然壓電傳感器通常在較高頻率下具有較低的噪聲,但MEMS可以提供接近0 Hz的較低噪聲,這適合許多CbM應(yīng)用。這種能力與三個傳感軸相結(jié)合,甚至可以擴(kuò)展到存在振動時的粗傾斜檢測,可用于檢測軟腳問題。
在測試臺上播種了各種故障,Voyager模塊中的三軸MEMS傳感器能夠清楚地檢測到這些故障,例如不平衡,不對中,軸承問題,翹起的轉(zhuǎn)子和彎曲的軸。此外,三軸傳感器在識別特定故障方面可以提供的信心也增加了三軸MEMS傳感器在CbM振動測量系統(tǒng)中的使用。
審核編輯:郭婷
-
mems
+關(guān)注
關(guān)注
129文章
3896瀏覽量
190340 -
電機(jī)
+關(guān)注
關(guān)注
142文章
8930瀏覽量
145090 -
MEMS傳感器
+關(guān)注
關(guān)注
16文章
423瀏覽量
42421 -
加速度計
+關(guān)注
關(guān)注
6文章
698瀏覽量
45858
發(fā)布評論請先 登錄
相關(guān)推薦
速度控制基礎(chǔ)知識:用于交流感應(yīng)電機(jī)的 VFD 還是 Triac?
有刷直流、無刷直流、步進(jìn)電機(jī)、交流感應(yīng)電機(jī)在內(nèi)的高效能方案
如何使用STM32F啟動電機(jī)控制FOC交流感應(yīng)?
請問X-CUBE-MCSDK是否支持交流感應(yīng)電機(jī)?
交流感應(yīng)電動機(jī)故障診斷
基于STM32F103和IFOC的三相交流感應(yīng)電機(jī)測控系統(tǒng)設(shè)計
基于ADMC401的三相交流感應(yīng)電機(jī)SVPWM變頻調(diào)速
基于DSP交流感應(yīng)電機(jī)直接轉(zhuǎn)矩模糊控制系統(tǒng)
電機(jī):交流感應(yīng)電機(jī)FOC、無傳感器FOC和觀測器的介紹
電機(jī):空間矢量調(diào)制與交流感應(yīng)電機(jī)的操作介紹
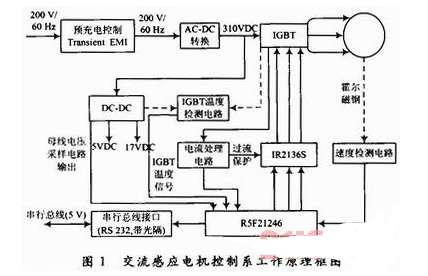
采用瑞薩單片機(jī)交流感應(yīng)電機(jī)控制電路實現(xiàn) 交流感應(yīng)電機(jī)系統(tǒng)的原理
交流感應(yīng)電機(jī)的設(shè)計與操作理論
三相交流感應(yīng)電機(jī)驅(qū)動原理

交流感應(yīng)電機(jī)與永磁同步電機(jī)的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論