 基于單個全景相機的視覺里程計
基于單個全景相機的視覺里程計
摘要
本文提出了一種新的直接視覺里程計算法,利用360度相機實現魯棒的定位和建圖。本系統使用球面相機模型來處理無需校正的等距柱狀圖像,擴展稀疏直接法視覺里程計(DSO,direct sparse odometry),從而實現全方位感知。將建圖和優化算法應用用于新模型后,可以在局部窗口中對含內、外參在內的相機參數以及三維建圖進行聯合優化。此外,我們在真實世界和大規模模擬場景中對所提出的算法進行了定性和定量的評估。大量實驗表明,我們的系統達到了SOTA的結果。
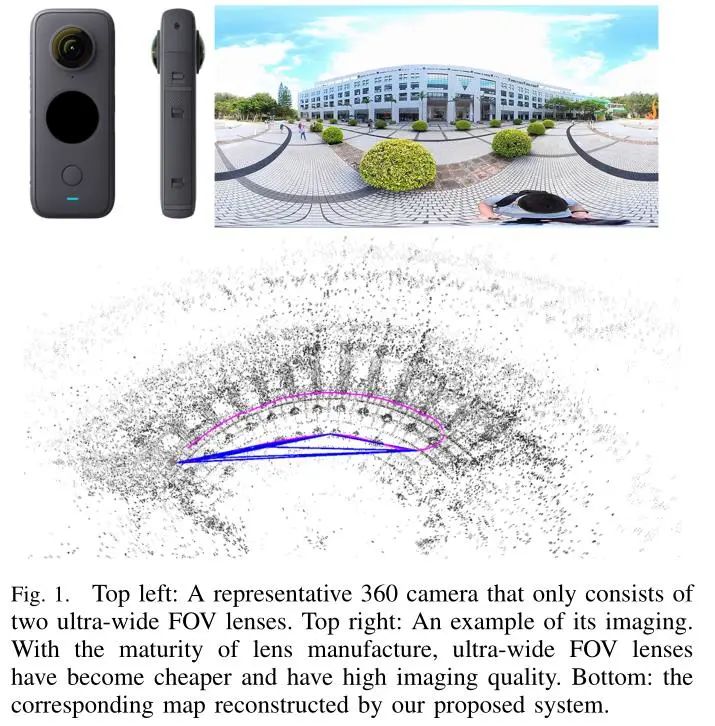
圖1 左上方圖中是僅由兩個超寬視場鏡頭組成的典型全景相機。右上角是該360相機成像的例圖。隨著透鏡制造行業的成熟,超寬視野透鏡變得更便宜,成像質量也更高。下方的圖是由本文中360VO系統重建的地圖。
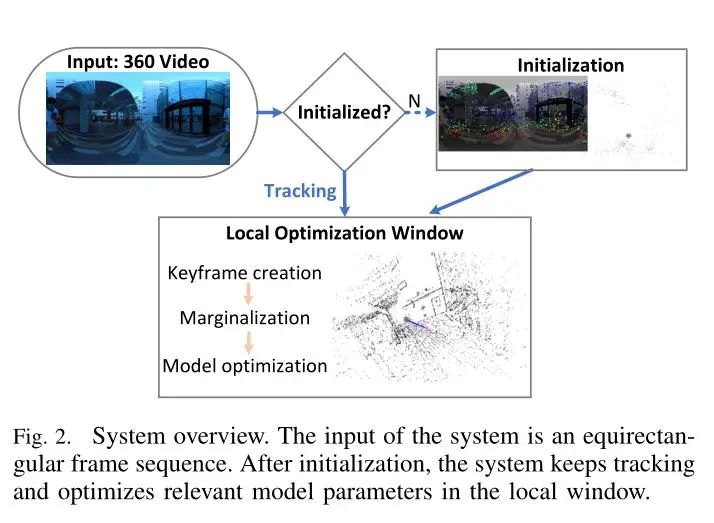
圖2 360VO系統概覽。該系統的輸入是一串等距柱狀的幀序列。初始化后,系統在局部窗口中跟蹤并優化相關模型參數。
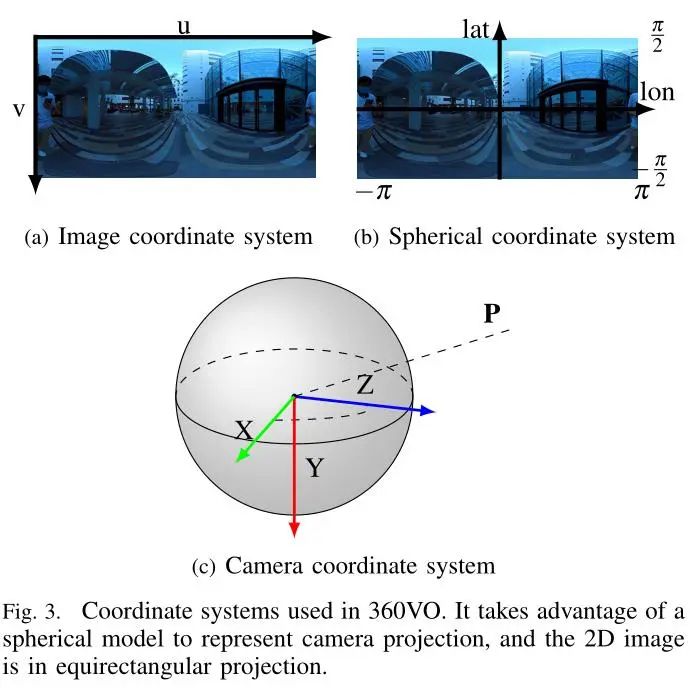
圖3 上圖顯示的是360VO的坐標系,它利用了球面模型的優點來表示相機投影。此外,2D圖像是等距柱狀投影。
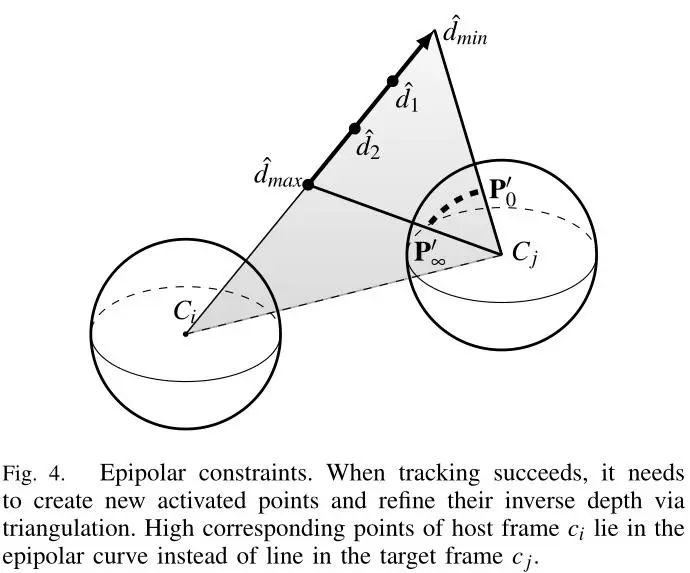
圖4 極線約束。當成功追蹤時需要創建新的激活點,并通過三角化來細化它們的逆深度。主幀Ci的高對應點位于極線曲線上,而非位于目標幀Cj中的直線上。
圖5 合成數據集中部分序列的代表幀。該合成數據集是在真實的城市模型中渲染得到的,由10個大型視頻序列組成。
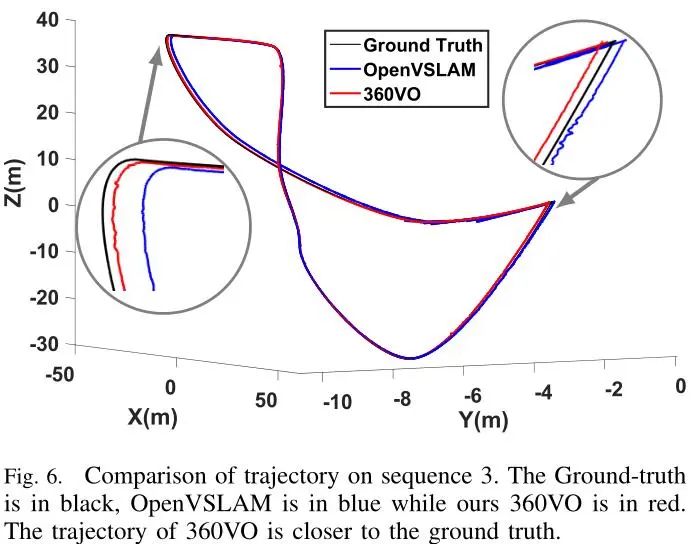
圖6 基于序列3的軌跡比較。圖中黑色曲線表示Ground-truth,藍色曲線表示OpenVSLAM得到的軌跡,紅色曲線表示本文提出的360VO得到的軌跡。結果顯示360VO的軌跡更接近于真值。
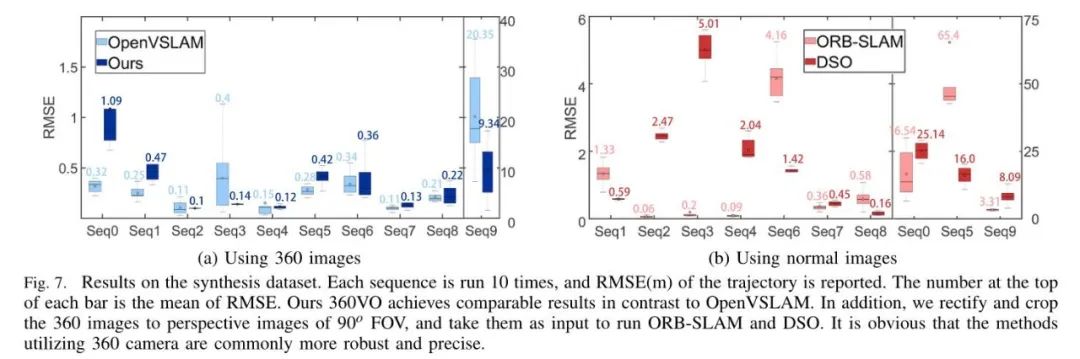
圖7 上圖是合成數據集得到的的結果。每個序列運行10次,得到軌跡的均方根誤差(RMSE,Root Mean Square Error)。圖中每個柱形頂部的數字是均方根誤差的平均值。與OpenVSLAM相比,我們的360VO取得了可觀的結果。此外,我們將360°的圖像校正并裁剪為90°視場的透視圖像,并將其作為運行ORB-SLAM和DSO的輸入。顯然,利用360相機的方法通常更魯棒、精度更高。
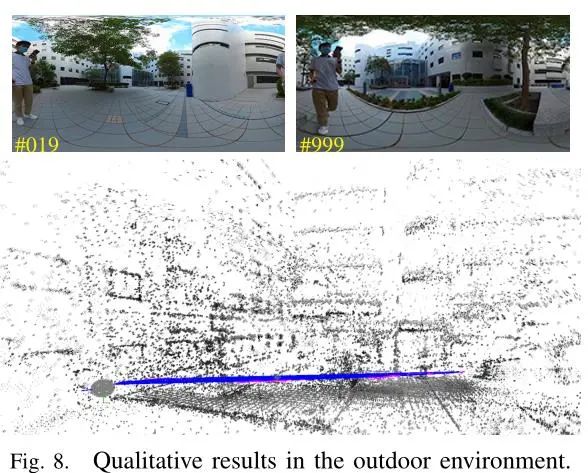
圖8 360VO在室外環境中測試的定性結果
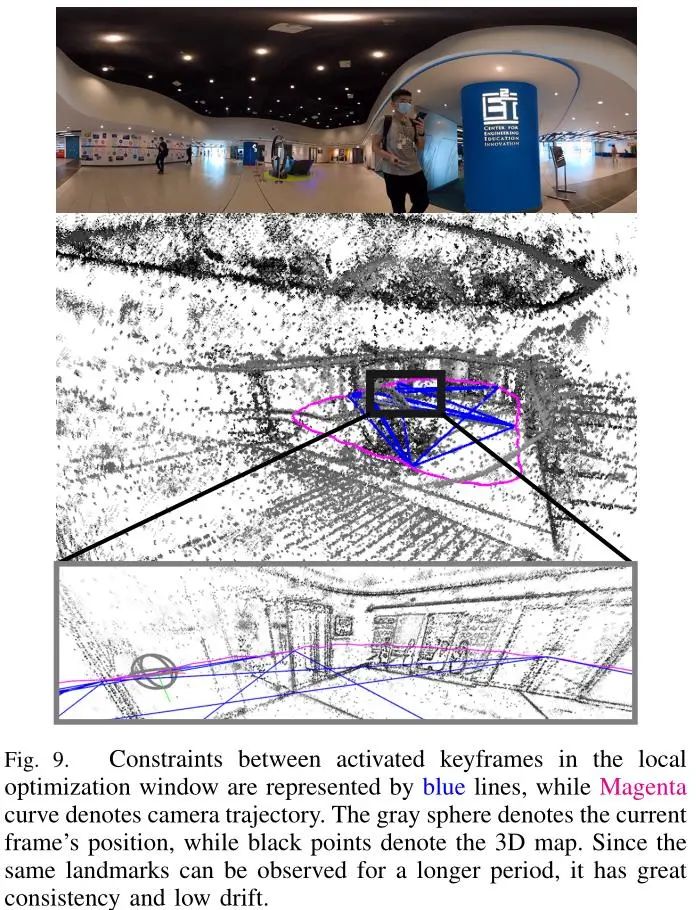
圖9 圖中藍色線表示局部優化窗口中激活關鍵幀間的約束,品紅色曲線表示相機軌跡。灰色的球體表示當前幀的位置,而黑色的點表示3D地圖。由于同一個地標可以被長時間地觀測到,本文中算法得到的結果具有較好的一致性和較低的漂移。
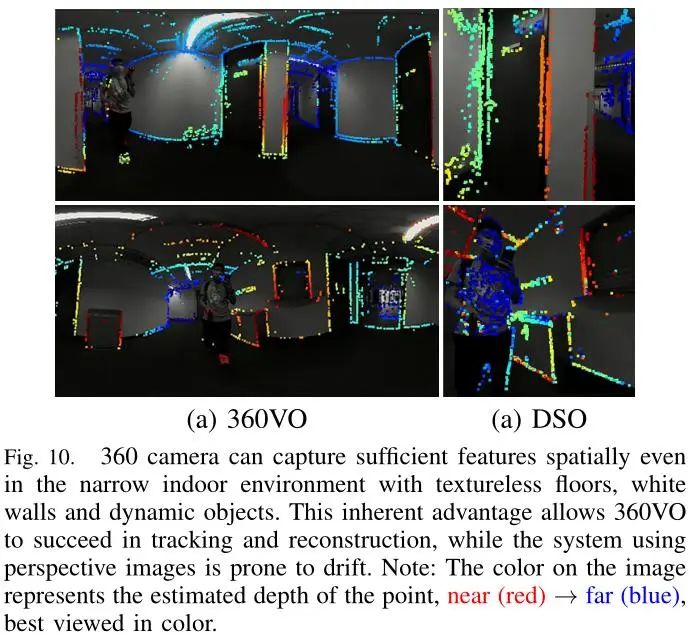
圖10 即使在有著無紋理地板、白色墻壁和動態物體的狹窄的室內環境中,360相機也能在空間上捕捉到足夠的特征。這種固有的優勢使得360VO能夠成功地跟蹤和建圖,而使用透視圖像的系統則容易產生漂移。注:圖像上的顏色表示點的估計深度,近(紅色)→遠(藍色)
審核編輯 :李倩
-
算法
+關注
關注
23文章
4600瀏覽量
92646 -
相機
+關注
關注
4文章
1344瀏覽量
53516
原文標題:360VO:基于單個全景相機的視覺里程計
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
淺談掃地機器人用到的那些電子元器件!

機器視覺系統硬件組成之工業相機篇

網絡研討會: Teledyne FLIR IIS Forge 5GigE高速高精度機器視覺工業相機

友思特方案 多相機的完美閉環:proFRAME車載全景環視相機數采方案


視覺慣性里程計(VIO)在運動估計中的優勢及應用

labview全景圖像拼接
為什么需要使用線陣相機 線陣相機與面陣相機的區別
線陣相機與面陣相機的區別與選型
Ladybug 全景相機, 360°球形成像,帶來全方位的視覺體驗


一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統






 工商網監
工商網監
評論