 車載CAN-FD的抗擾度評估技術
車載CAN-FD的抗擾度評估技術
摘要
眾所周知,大量的電子控制單元(ECU)和高速通信局域網(LAN)對于高級駕駛輔助系統(ADAS)來說是必要的。原始設備制造商(OEM)有興趣在車輛上引入具有靈活數據速率的控制器區域網絡(CAN-FD),因為它具有高數據速率和低數據速率的仲裁階段。同時,確保抗干擾性能是使用差分信號的CAN-FD的主要問題之一。我們以前報道過一種方法,以100Mbps以太網ECU的Sdc11為基礎,使用差分信號來定義抗擾性能的標準。我們還研究了CAN-FD的模式轉換S參數的定義。在此基礎上,我們提出了一種CAN-FD收發器IC的抗擾度評估方法,以用于IC的選擇。
I.簡介
最近,汽車上安裝了許多ECU,由于駕駛輔助功能和電氣組件的增加,ECU之間處理的數據量也增加了。CAN被廣泛用作連接ECU的車內局域網標準,其中數據的傳輸和接收速度主要為500 kbps。然而,隨著上述車載局域網上信息量的增加,羅伯特-博世新制定了CAN- FD,可以以5 Mbps的速度發送和接收數據。CAN在仲裁階段和數據階段使用相同的比特率。
相比之下,CAN-FD可以改變數據階段的比特率,使數據傳輸的最高速度為5Mbps[1],ISO標準[2]。具體來說,數據相位的信號振幅是相同的,而5 Mbps的數據相位速率是500 kbps的十倍。因此,確保抗干擾性能是CAN-FD的主要問題之一。
相比之下,CAN-FD作為CAN的替代品,正在進行車內研究。預計許多汽車制造商將繼承傳統的CAN組件和設計政策,如通信線路和ECU設計要求。為了確保這一點,有必要確定收發器IC的抗擾度性能。
因此,我們認為有必要事先估計一下收發器IC的抗干擾性能,并選擇一個可以安裝在車上的收發器IC。過去已有多項研究報道了以太網系統或差分通信系統的抗擾性能與100Base-T1[3]、1000Base-T1[4]和仿真分析[5]的模式轉換混合模s參數(Sdc)之間的關系。
在此基礎上,提出了一種定義Sdc11100mbps以太網[6]和1gbps以太網ECU[7]抗擾性能標準的方法。我們確認了批量電流注入(BCI)測試結果與Sdc11值之間的關系,其中BCI測試是車輛設備[8]的抗擾度測試之一。
由于CAN-FD已經被指定為繼承傳統設計要求中的Sdc11,到達收發器IC端的波形預計將根據BCI測試期間到達ECU端的噪聲來估計。
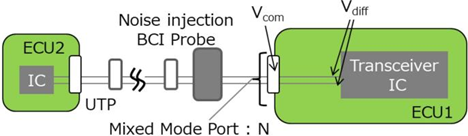
圖1. BCI對UTP的共模噪聲的誘導。
以往關于BCI測試建模的研究通常基于三維電磁場模擬[9]、等效電路模型(部分與實測模型相結合)[10]或實測模型[11]。被測目標設備通常與BCI測試環境分開建模,作為電路模型或阻抗模型。此外,這些研究還采用了單端特性進行建模。在這項研究中,我們將目標限定為CAN-FD差分通信。這使我們能夠將模式轉換s參數的概念應用于噪聲傳播分析,并專注于到達收發端最壞的差分噪聲。此外,通過將目標頻率限制在CAN-FD的抗擾度性能惡化的頻段,可以使用經驗知識進行有效分析。
這項研究的目的是建立一種評估收發器IC的抗干擾性能的方法,并將其作為一種IC選擇方法。作為一個標準,它應該能夠估計實際收發器IC在BCI測試中的誤差。
II.估計收發器終端的噪音水平
A.收發器IC選擇方法概述
在BCI測試中,共模噪聲被應用于非屏蔽雙絞線(UTP)電纜。然后,根據通信路徑的不平衡程度,將其轉換為差分噪聲。我們提出了一種使用100 Mbps和1 Gbps ECU的SdcNN定義抗擾性能標準的方法(圖1),其中我們定義了以dB符號表示的標準方程:

Vcom: 通過BCI測試施加到ECU的最大共模噪聲水平[V]。
Vdiff: 收發器可接受的差分噪聲的閾值水平[V]。
這些是在[6]中測量的電壓。
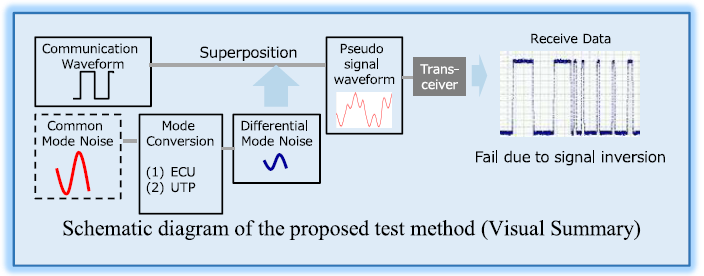
到達收發器IC的差分噪聲是造成誤差的主要原因。因此,有必要選擇一個能夠承受BCI測試中產生的最差差分噪聲的收發器IC。視覺摘要(在第1頁)顯示了所提出的IC選擇方法的原理圖。在這項研究中,我們重點關注在OEM測試條件下CAN-FD的高錯誤率的10-16MHz。通過使用通信路徑的模式轉換S參數對BCI測試期間到達ECU端的共模噪聲的影響來量化到達收發器IC端的最差差分噪聲(圖2),下一節將詳細解釋。
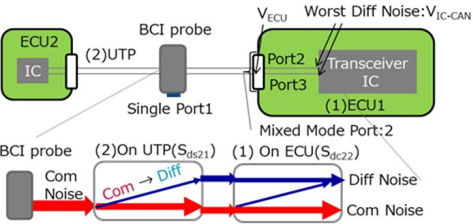
圖2. BCI測試期間的模式轉換原理圖。
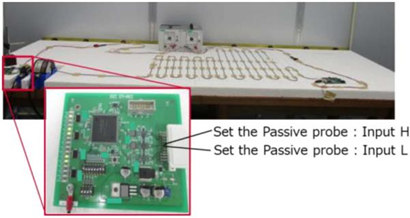
圖3. BCI測試期間的VECU測量設置。
接下來,通過將得出的最差差分噪聲疊加到通信信號上,產生一個偽信號波形。偽信號通過信號發生器直接作用于收發器IC。然后,根據輸出波形中是否存在錯誤,來估計BCI測試的通過或失敗。在這些頻率中,位寬有時會因噪聲而波動,高(H)或低(L)被誤判。在我們的研究中,我們把錯誤的原因限制在這種位寬波動上。本節介紹了最差差分噪聲VIC-CAN的推導和驗證。
B. CAN-FD的VIC-CAN的推導
到達CAN-FD收發器端的差分噪聲VIC-CAN被認為是由ECU中的模式轉換產生的差分噪聲VIC和由通信線路(UTP)上的模式轉換產生的差分噪聲VUTP之和,具體如下:

VIC: ECU上模式轉換的電壓:VECU * Sdc22[V] @10-16 MHz。
VUTP: 來自UTP上模式轉換的電壓:VECU* Sdc21[V]@10-16MHz。
為了計算由ECU中的模式轉換產生并到達收發器IC終端的差分噪聲VIC,在BCI測試期間在ECU端測量VECU(圖3)。分析頻率被設定為10到16MHz,在這個頻率下,CAN- FD的抗干擾性能會惡化,達到的共模噪聲會超過監測電流。一個使用VIC= VECU*Sdc22的VIC計算結果的例子顯示(圖4),其中ECU的Sdc22被設定為40dB。
根據傳統的CAN ECU規范,Sdc被選擇為40dB。
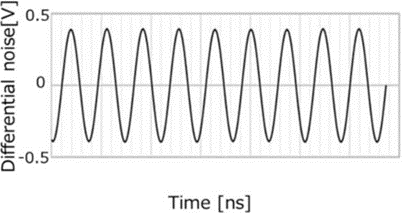
圖4. VIC的例子(在BCI測試期間12MHz的噪音)。
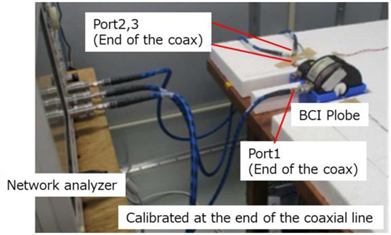
圖5. UTP的Sdc21測量設置。
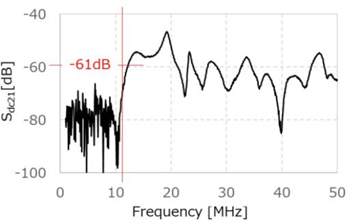
圖6. Sds21的測量結果。
據估計,在10到16MHz時,最大約0.4V的差分噪聲已經到達。
接下來,由通信線路的模式轉換產生的差分噪聲VUTP被導出。根據原始設備制造商設定的ECU的Sdc測量頻段,它被測量到50MHz。構建BCI測試環境是為了測量從BCI探頭通過通信線路到達ECU端的信號的模式轉換Sdc21(圖5和6)。由于VECU的最大值在12MHz時為120V,通過乘以12MHz時61dB的Sdc21,得到VUTP為0.1V。因此,VUTP的最差值被設定為0.1V,并在本研究中應用于10-16MHz的其他頻率。從上述情況來看,到達收發端的差分噪聲VIC-CAN在12MHz時被計算為約0.5V。
C.VIC-CAN的驗證
因為在BCI測試中很難測量到達收發器IC端的差分噪聲,因為通信差分信號是疊加的。因此,我們把重點放在通信信號的位寬因差分噪聲而變化的事實上,并從位寬的波動量驗證了差分噪聲計算的有效性。即加噪聲時,主隱性判斷位置發生變化,信號波形的位寬發生變化,因此以波動量作為指標。先前計算的VIC-CAN(12MHz時為0.5V)被用作最差的差分噪聲。為了看到連續變化的相位的最大值,通過以足夠小的0.1rad步長進行移位來檢查。在信號波形上疊加VIC CAN,并以0.1rad的步長移動相位,信號波形的最大波動量為33ns(表I,圖7)。這種波動直接影響到收發電路中的比特提取。
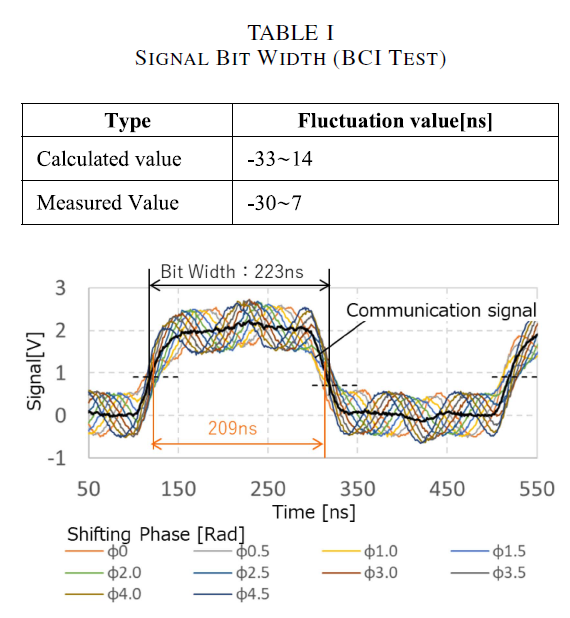
圖7. 在收發器輸入處的位寬波動計算值的例子。
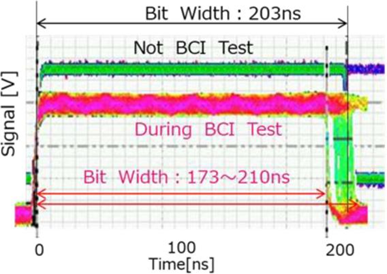
圖8. 在收發器輸出(RXD)進行BCI測試期間的位寬波動測量值。
在BCI測試期間測量接收數據(RXD)波形的結果是,信號波形的最大波動量為30ns(表I,圖8)。在這里,比特波動由接收信號主導,但信號幅度相對穩定,因為它是由RXD輸出電路控制的。由于證實了計算出的信號波形的最大波動量與實際測量的波動量幾乎相同,因此得出結論,12MHz的VIC CAN可以在上一節中被適當估計。
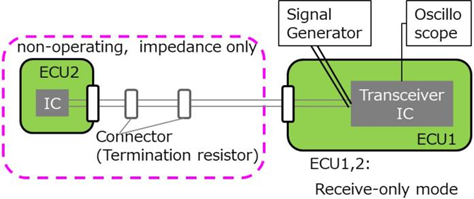
圖9. 擬議的測試方法的測試裝置。
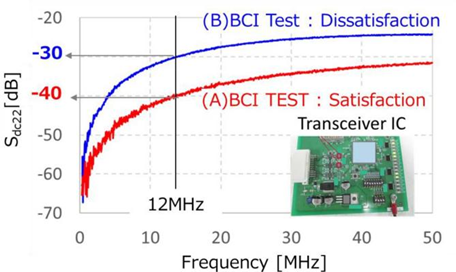
圖10. 評估板和Sdc22的結果。
III.審查收發器IC選擇方法
由于上一節中計算的VIC CAN是到達收發器IC端的差分噪聲,在BCI測試期間輸入到收發器IC的信號可以通過將VIC CAN疊加到通信信號上進行模擬。偽信號波形的輸入系統和輸出波形的測量系統如圖所示(圖9)。偽信號從信號發生器直接施加到安裝在評估板上的收發器IC的CAN-H和CAN-L終端。然后,用示波器測量輸出,以獲得其波形。由于只有一種類型的樣品IC(來自合作的半導體制造商的原型)可用,因此準備了以下兩種類型的偽信號波形,并用于驗證測試方法。

我們準備了兩塊具有不同Sdc22值的板子,即40分貝和30分貝,并安裝了收發器IC以進行BCI測試(圖10)。我們確認,BCI測試結果的通過或失敗在兩個板子中是不同的。
結果顯示在圖11中。波形(A)相當于原始波形,沒有發生錯誤,而波形(B)會導致位反轉,可以估計出一個通信錯誤。從這一結果中,我們可以確認使用應用于收發器IC的偽信號波形對BCI測試的通過或失敗進行估計。
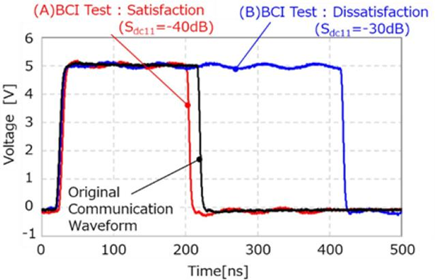
圖11. 實例測量的結果。
IV.總結
提出了一種CAN-FD收發器的IC選擇方法,利用混合模式的S參數來估計UTP和ECU上的模式轉換,來定義抗干擾性能的最差差分噪聲。在BCI測試期間到達收發器IC的最差差分噪聲被疊加在信號波形上,以獲得一個用于評估IC輸出信號的偽信號。通過比較其在IC輸出信號終端的位寬波動與具有實際通信錯誤的BCI測試中的位寬波動,驗證了最差的差分噪聲水平。最后,通過與實際BCI測試的結果進行比較,我們確認使用該方法可以估計BCI測試的通過或失敗,只需將偽信號直接應用于收發器IC,而無需使用BCI測試環境。
審核編輯:湯梓紅
-
收發器
+關注
關注
10文章
3393瀏覽量
105860 -
CAN
+關注
關注
57文章
2715瀏覽量
463364 -
ecu
+關注
關注
14文章
880瀏覽量
54404 -
抗擾度
+關注
關注
0文章
18瀏覽量
9257
原文標題:車載CAN-FD的抗擾度評估技術
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
車載線束系統輻射抗擾度測試的案例分析
CAN-FD協議你了解多少
一文淺析汽車CAN-FD總線的通信應用
多核異構-雙核高速率CAN-FD評測
是否有任何外部組件可以使ESP32S3與CAN-FD兼容?
[原創] MicrochipCAN LIN CAN-FD汽車網絡開發方案
![[原創] MicrochipCAN LIN <b class='flag-5'>CAN-FD</b>汽車網絡開發方案](https://file1.elecfans.com//web2/M00/A7/38/wKgZomUMQxqAQ3EDAACKNtK0Npk204.png)
你知道CAN-FD協議有多少?
DS70000系列數字示波器在CAN-FD協議解碼上的應用
STM32設備上的CAN FD
簡單介紹基于CAN-FD的診斷通信傳輸層
CAN與CAN-FD主要區別概述
CAN-FD協議有哪些車用
如何使用DSLogic分析CAN/CAN-FD 信號?






 工商網監
工商網監
評論