") 如何取消激光雷達(dá)接收器的環(huán)境光
如何取消激光雷達(dá)接收器的環(huán)境光
飛行時(shí)間(ToF)激光雷達(dá)面臨的一個(gè)更困難的挑戰(zhàn)是接收信號(hào)鏈所需的高靈敏度。通常,準(zhǔn)直(平行光線)激光脈沖被發(fā)送到一個(gè)點(diǎn)。準(zhǔn)直激光源的優(yōu)點(diǎn)是它限制了發(fā)散造成的光損失,并使光斑尺寸在距離內(nèi)保持恒定。然而,一旦光線照射到物體上,這種光就會(huì)向多個(gè)方向反彈——這稱為散射。反射回光源的光量與 1/R 成正比2,也稱為平方反比定律。在短距離內(nèi),檢測(cè)物體并不困難。然而,為了檢測(cè)》100米處的物體,需要高增益來(lái)檢測(cè)由于平方反比定律損失而導(dǎo)致的少量反射光。在接收器中使用高增益的后果之一是環(huán)境光對(duì)信號(hào)鏈的影響。太陽(yáng)是波長(zhǎng)范圍很廣的光源。激光雷達(dá)系統(tǒng)通常選擇900 nm和1550 nm的波長(zhǎng),因?yàn)檫@些光譜中來(lái)自太陽(yáng)的光自然為零。不幸的是,為了探測(cè)遠(yuǎn)處的物體,我們?cè)诮邮掌髦蝎@得了顯著的收益,即使光譜中有這些自然零點(diǎn),太陽(yáng)的環(huán)境光也會(huì)使接收器飽和。這有效地使系統(tǒng)失明并使其無(wú)用。本文將探討如何減輕環(huán)境光對(duì)激光雷達(dá)接收器鏈的影響的解決方案。
基本
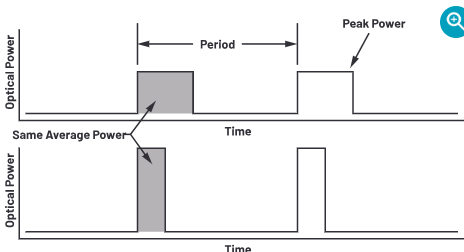
退后一步,激光用于發(fā)出狹窄的光脈沖;該激光脈沖擊中目標(biāo),光線從物體反射。檢測(cè)器用于測(cè)量該反射返回所需的時(shí)間。通過了解光速和激光脈沖的往返時(shí)間,可以計(jì)算出距離。通常,脈沖激光的振幅越高,返回信號(hào)就越大。對(duì)于遠(yuǎn)程激光雷達(dá),激光功率的人眼安全限制了現(xiàn)代系統(tǒng)的范圍。曲線下的面積決定了脈沖的能量,如圖1所示。通過達(dá)到更高的峰值功率,必須減小該脈沖的寬度,以使曲線下的面積低于眼睛安全限值。因此,我們的目標(biāo)是提供寬度相對(duì)較窄的高振幅激光脈沖。在當(dāng)前的LIDAR系統(tǒng)中,脈沖寬度約為5 ns,并且正在向更短的脈沖寬度移動(dòng)。激光雷達(dá)需要考慮的另一個(gè)方面是散射。通常,使用雪崩光電二極管(APD)檢測(cè)器來(lái)提供光增益,以解決平方反比定律問題。APD有利于信號(hào)鏈,因?yàn)榭缱?a href="http://www.nxhydt.com/tags/放大器/" target="_blank">放大器(TIA)是信號(hào)鏈中噪聲的限制因素。通過在檢波器中施加增益,可以降低系統(tǒng)的輸入?yún)⒖荚肼暋U?qǐng)記住,APD存在局限性,增益過大會(huì)在擊穿時(shí)產(chǎn)生較差的噪聲性能。

圖1.不同激光輸出的示例。
激光雷達(dá)挑戰(zhàn)
與任何其他工程問題一樣,需要權(quán)衡取舍。接收信號(hào)鏈需要具有足夠高的帶寬來(lái)檢測(cè)~5 ns寬激光脈沖的邊緣,并且檢波器的電容需要很小,以不限制TIA帶寬。較小的電容也有助于APD的散粒噪聲,因?yàn)樗鼈儽舜顺杀壤?duì)于實(shí)際應(yīng)用,必須平衡靈敏度、帶寬和功耗。在接收信號(hào)鏈中獲得更高增益的另一個(gè)挑戰(zhàn)是隨之而來(lái)的大動(dòng)態(tài)范圍。現(xiàn)代APD的反向偏置接近300伏,以實(shí)現(xiàn)這些更大的增益。當(dāng)高反射物體非常靠近探測(cè)器時(shí),問題變得明顯。這種大信號(hào)與APD相對(duì)較大的增益相結(jié)合,可能導(dǎo)致數(shù)百mA電流流過TIA。大多數(shù)通信TIA不能在這種事件中幸存下來(lái),更不用說在下一個(gè)脈沖周期的合理時(shí)間內(nèi)恢復(fù)了。幸運(yùn)的是,激光雷達(dá)專用TIA具有內(nèi)置箝位,可分流電流并在100 ns以下恢復(fù)。通過占空比和關(guān)閉未使用的通道來(lái)解決電源問題。考慮到這些,最后一個(gè)大問題是來(lái)自環(huán)境光的直流光電流,解決這個(gè)問題并非易事。
交流耦合與直流耦合輸入
乍一看,一個(gè)簡(jiǎn)單的解決方案是將輸入耦合到TIA以阻止直流電。不幸的是,這種方法有很多陷阱。飽和恢復(fù)時(shí)間將受到影響,使系統(tǒng)失明。如果來(lái)自近距離物體的大脈沖,交流電容器將被充電。TIA只能向交流電容注入少量電流,因?yàn)榉答?a target="_blank">電阻(大約為10 kΩ至100 kΩ)限制了電流。根據(jù)電容器的值,RC時(shí)間常數(shù)非常大,可能需要數(shù)百μs才能恢復(fù)。這是不可接受的,因?yàn)橥ǔ?00 m檢測(cè)分配2 μs的時(shí)間,并且我們將錯(cuò)過來(lái)自更遠(yuǎn)物體的信號(hào)。交流耦合TIA的另一個(gè)缺陷是激光源的重復(fù)率。當(dāng)您交流耦合輸入脈沖時(shí),脈沖將在交流電容上取平均值。探測(cè)器的信號(hào)是單極性的,會(huì)慢慢地為交流電容器充電。該電容器上會(huì)產(chǎn)生直流偏移。這系統(tǒng)地減小了TIA的線性范圍,直流偏移將根據(jù)重復(fù)率和返回信號(hào)的幅度而變化。有關(guān)交流輸入耦合TIA的更詳細(xì)分析,請(qǐng)參閱“如何有效設(shè)計(jì)和優(yōu)化LIDAR系統(tǒng)的TIA接口”一文。幸運(yùn)的是,直流耦合輸入避免了所有這些細(xì)微差別和次級(jí)效應(yīng),但代價(jià)是增加了復(fù)雜性。消除此電流的有效方法是集成閉環(huán)電路,將相反的電流注入TIA的輸入。
直流取消電路
圖2顯示了如何實(shí)現(xiàn)模擬閉環(huán)以消除直流輸入電流的框圖。誤差放大器的工作是查看TIA的輸出,并向TIA的輸入注入相反的電流。它比較并伺服輸出以匹配 TIA 的基準(zhǔn)電壓源。最好使用TIA的基準(zhǔn)電壓源來(lái)推導(dǎo)誤差放大器的基準(zhǔn)電壓源,原因有二:與輸出的基準(zhǔn)電壓源匹配,并確保PSRR對(duì)于TIA來(lái)說是守恒的。為了節(jié)省功耗和成本,誤差放大器的電路應(yīng)使用帶寬較低的放大器。建議對(duì)誤差放大器的輸入使用低通濾波器,因?yàn)槟幌M焖倜}沖耦合回輸入。

圖2.直流取消框圖。
圖 3 示出了 LTC6560 的直流消除電路。當(dāng)TIA沒有輸入電流時(shí),LTC6560的輸出標(biāo)稱值約為1 V DC。因此,需要從基準(zhǔn)電壓源分壓一個(gè)電阻分壓器來(lái)匹配該電壓,將基準(zhǔn)電壓標(biāo)稱值1.5 V分壓以匹配輸出1 V。 R1和C1產(chǎn)生約10.6 kHz的低通;這有助于最大限度地降低誤差放大器注入 LTC6560 的噪聲量。該低通將是該環(huán)路的主極點(diǎn),可以根據(jù)不同的帶寬要求進(jìn)行調(diào)整。一個(gè)簡(jiǎn)單的積分誤差放大器電路用于將LTC6560的輸出伺服至1 V;請(qǐng)記住,當(dāng)LTC6560上沒有電流時(shí),標(biāo)稱輸出電壓為1 V。R2是一款20 kΩ電阻,是將LT6015的輸出轉(zhuǎn)換為電流的簡(jiǎn)單方案。該電阻器的值和運(yùn)放的最大擺幅將根據(jù) LT6015 的輸出擺幅設(shè)定最大電流。由于LT6015不是軌到軌運(yùn)放,因此最大直流抵消將限制為L(zhǎng)T6015的最大擺幅與LTC6560的輸入自偏置電壓(標(biāo)稱值為1.5 V)之差。這大約是 3 V,將為我們提供 150 μA 的最大直流抵消電流。

圖3.用于 LTC6560 的直流消除電路。
圖 4 和圖 5 示出了 LTC6560 DC 消除電路的 LTspice 仿真。請(qǐng)注意,仿真中使用V2來(lái)設(shè)置積分誤差放大器的基準(zhǔn)電壓源。這用于幫助電路仿真和建立確定性的起始電壓。?
該 DC 消除電路也可與 LTC6561 配合使用。通過使用四個(gè)輸出電阻器將電流注入每個(gè)通道,您可以節(jié)省三個(gè)LT6015,如圖6所示。需要注意的一點(diǎn)是,我們現(xiàn)在正在創(chuàng)建一個(gè)可以耦合通道的路徑。但是,40 kΩ電阻對(duì)通道間隔離的影響最小。最后,通道的直流輸入電流應(yīng)該非常相似,因?yàn)檎`差放大器在通道之間不會(huì)發(fā)生劇烈變化。該電路將使所有光通道彼此靠近的系統(tǒng)受益。

圖4.LTspice仿真原理圖。

圖5.直流抵消模擬的輸入和輸出波形。

圖6.用于 LTC6561 的直流消除電路。
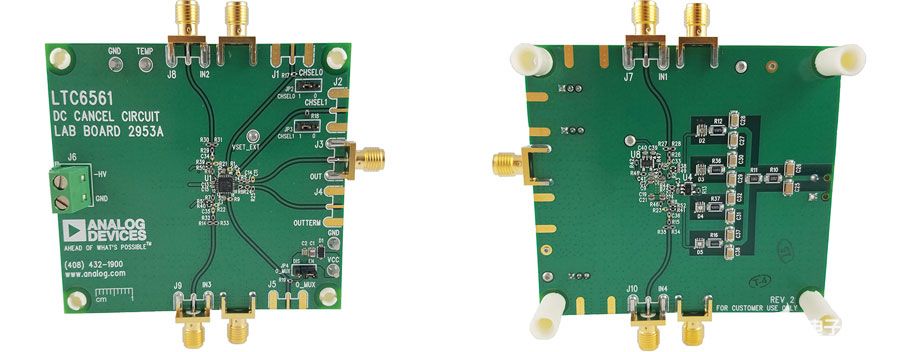
圖7.LB2953A 直流取消電路板實(shí)驗(yàn)室板。
結(jié)果
制作了概念驗(yàn)證板以創(chuàng)建更具吸引力的文章并驗(yàn)證性能。如圖 7 所示。正如預(yù)期的那樣,直流消除電路主要由電路板布線和元件的寄生元件主導(dǎo)。該電路將積分噪聲從非直流消除電路的64 nA rms增加到集成在100 kHz至200 MHz的直流消除電路的66 nA rms。 圖8顯示了使用和不使用直流消除電路時(shí)測(cè)量的折合到輸入端的噪聲密度。從該電路中移除APD,以找到?jīng)]有TIA容性負(fù)載的本底噪聲。這為非直流消除電路產(chǎn)生59 nA rms的積分噪聲,對(duì)直流消除電路產(chǎn)生60 nA rms的積分噪聲。但是,該電路旨在與檢測(cè)器一起使用,并且應(yīng)將電容包含在電路的性能中。

圖8.折合到輸入端的噪聲密度。
結(jié)論
對(duì) LTC6560 和 LTC6561 的輸入進(jìn)行交流耦合可能會(huì)帶來(lái)一些挑戰(zhàn)。最終,在少數(shù)情況下,交流耦合可以在對(duì)電路性能影響最小的情況下實(shí)現(xiàn)。在現(xiàn)代LIDAR系統(tǒng)中,為了最大限度地提高系統(tǒng)性能,所提出的直流消除電路可以提供最大的恢復(fù)時(shí)間性能,而不會(huì)影響電路噪聲。這種性能的代價(jià)是布局的復(fù)雜性和積分誤差放大器的功耗增加。
審核編輯:郭婷
-
接收器
+關(guān)注
關(guān)注
14文章
2458瀏覽量
71806 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3943瀏覽量
189625 -
TOF
+關(guān)注
關(guān)注
9文章
478瀏覽量
36276
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
空間激光雷達(dá)最小接收光功率的計(jì)算
激光雷達(dá)分類以及應(yīng)用
常見激光雷達(dá)種類
激光雷達(dá)面臨的機(jī)遇與挑戰(zhàn)
消費(fèi)級(jí)激光雷達(dá)的起航
激光雷達(dá)的核心重要指標(biāo)到底是什么?
自動(dòng)駕駛激光雷達(dá)新型探測(cè)器:近紅外MPPC
讓機(jī)器人在陌生環(huán)境里穿梭自如的激光雷達(dá)
TOF激光雷達(dá)
毫米波雷達(dá)VS激光雷達(dá)VS超聲波雷達(dá)
最佳防護(hù)——激光雷達(dá)與安防監(jiān)控解決方案
激光雷達(dá)知多少:從技術(shù)上講講未來(lái)前景
激光雷達(dá)的工作主要分成四大部分
激光雷達(dá)中的激光發(fā)射與接收光學(xué)原理
如何取消激光雷達(dá)接收器的環(huán)境光





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論