") 狀態(tài)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)選擇及其對(duì)信號(hào)鏈實(shí)現(xiàn)的影響
狀態(tài)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)選擇及其對(duì)信號(hào)鏈實(shí)現(xiàn)的影響
本文對(duì)狀態(tài)監(jiān)測(cè)系統(tǒng)的傳感器接口數(shù)據(jù)采集(DAQ)信號(hào)鏈設(shè)計(jì)考慮進(jìn)行了簡(jiǎn)要討論。我們將 研究 某些 設(shè)計(jì) 選擇, 如 系統(tǒng) 架構(gòu)、 傳感器 類型 和 分析 方法 會(huì) 如何 影響 DAQ 信號(hào) 鏈 設(shè)計(jì), 并 通過 詳細(xì) 介紹 兩 個(gè) DAQ 信號(hào) 鏈 設(shè)計(jì) 示例, 將 這些 理論 付諸 實(shí)踐。
介紹
狀態(tài)監(jiān)測(cè)的核心價(jià)值是長(zhǎng)期節(jié)約成本。通過預(yù)測(cè)性維護(hù)降低維護(hù)成本,并通過預(yù)防性維護(hù)消除計(jì)劃外生產(chǎn)停機(jī)時(shí)間,從而節(jié)省成本。這種價(jià)值的實(shí)現(xiàn)依賴于狀態(tài)監(jiān)測(cè)系統(tǒng)在開發(fā)的早期階段準(zhǔn)確檢測(cè)和識(shí)別故障條件的能力。
與開發(fā)后期的災(zāi)難性故障不同,開發(fā)早期階段的災(zāi)難性故障通常顯而易見且易于檢測(cè),而開發(fā)早期階段的故障檢測(cè)可能只會(huì)導(dǎo)致資產(chǎn)正常運(yùn)行行為的輕微偏差。這種偏差也可能是暫時(shí)的。正確檢測(cè)和分類早期故障特征通常需要使用不同檢測(cè)方式的高性能傳感器作為整體監(jiān)控解決方案的一部分。這些傳感器需要與具有匹配性能的DAQ信號(hào)鏈正確連接,以充分利用其檢測(cè)能力。 然后可以使用專門的算法組合和處理數(shù)據(jù),以確定被監(jiān)控資產(chǎn)的整體狀況。
與所有系統(tǒng)設(shè)計(jì)一樣,在設(shè)計(jì)狀態(tài)監(jiān)測(cè)系統(tǒng)時(shí)需要做出許多選擇。每一種選擇都有不同的權(quán)衡,并可能極大地改變DAQ信號(hào)鏈設(shè)計(jì)。
系統(tǒng)級(jí)注意事項(xiàng)
系統(tǒng)架構(gòu)
狀態(tài)監(jiān)測(cè)(CM)系統(tǒng)要考慮的第一個(gè)級(jí)別是系統(tǒng)架構(gòu)。根據(jù)傳感器和DAQ信號(hào)鏈之間的相對(duì)位置,有幾種常見的CM系統(tǒng)架構(gòu)選項(xiàng),每種選項(xiàng)都有一定的優(yōu)勢(shì)。
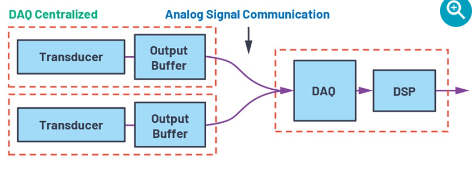
數(shù)據(jù)采集集中式
典型的 DAQ 集中 式 系統(tǒng) 將 多個(gè) 數(shù)據(jù) 采集 通道 捆綁 在 一個(gè) 集中 位置, 通常 以 盒 / 架 儀器 的形式 出現(xiàn)。傳感器位于遠(yuǎn)程位置,并使用模擬電纜連接到DAQ系統(tǒng)。
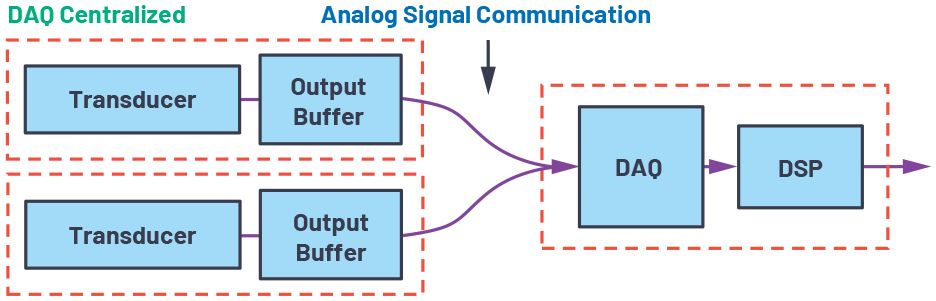
圖1.DAQ 集中式 系統(tǒng) 架構(gòu)。
DAQ 集中式 架構(gòu) 被 許多 現(xiàn)有 的 測(cè)量 解決 方案 廣泛 使用 。大多數(shù)臺(tái)式振動(dòng)監(jiān)測(cè)儀器以及工業(yè)模擬輸入模塊都采用這種架構(gòu)。它還非常適合設(shè)計(jì)具有內(nèi)置 CM 功能的資產(chǎn),例如,在電機(jī)和泵中集成 CM 功能時(shí)。
此體系結(jié)構(gòu)的一些主要優(yōu)點(diǎn)包括:
布線成本低。低成本的同軸和雙絞線電纜通常用于在傳感器和DAQ之間長(zhǎng)距離傳輸信號(hào)。
強(qiáng)大的界面。有許多標(biāo)準(zhǔn)接口協(xié)議,例如IEPE和4 mA至20 mA電流環(huán)路,旨在確保在嘈雜環(huán)境中提供可靠的傳感器接口。
靈活的傳感器支持。根據(jù)測(cè)量要求,可以設(shè)計(jì)相同的DAQ系統(tǒng)來支持多種傳感器類型。
支持惡劣的操作環(huán)境。傳感器和DAQ信號(hào)鏈的物理分離允許某些傳感器在電子元件通常不支持的條件下工作,例如具有極高的/低工作溫度。
更高效的數(shù)據(jù)采集 信號(hào)鏈實(shí)現(xiàn)。信號(hào)鏈設(shè)計(jì)可以共享更多常用模塊,以提高效率并降低成本。
采用DAQ集中式架構(gòu)的CM系統(tǒng)的典型數(shù)據(jù)采集信號(hào)鏈設(shè)計(jì)要求是:
性能。大多數(shù) DAQ 集中 式 系統(tǒng) 設(shè)計(jì) 為 支持 多種 傳感器 類型。其中一些具有雙重功能,也可以用作通用DAQ儀器。這些需求提高了DAQ信號(hào)鏈的性能要求,并要求寬動(dòng)態(tài)范圍、可調(diào)帶寬、交流線性度和直流精度等指標(biāo)。
輸入保護(hù)。由于DAQ集中式系統(tǒng)的輸入端子經(jīng)常暴露在外部訪問中,因此它們?nèi)菀资艿浇泳€錯(cuò)誤,信號(hào)過量程和ESD等因素的損壞。通常需要額外的保護(hù)電路來幫助保護(hù)DAQ輸入。
混疊拒絕。采用DAQ集中式架構(gòu)的系統(tǒng)供應(yīng)商并不總是控制傳感器和與系統(tǒng)一起使用的輸入信號(hào)。因此,這些系統(tǒng)需要能夠抵御目標(biāo)測(cè)量頻帶之外的信號(hào)和噪聲混疊。其中許多系統(tǒng)要求DAQ完全抑制所有帶外信號(hào)。
功率和面積。與其他系統(tǒng)架構(gòu)相比,DAQ集中式架構(gòu)對(duì)DAQ信號(hào)鏈的功耗和解決方案尺寸的限制更少。然而, 一些 較 新 的 系統(tǒng) 正在 推動(dòng) 更高 的 通道 密度, 其中 DAQ 信號(hào) 鏈 解決 方案 尺寸 和 熱 密度 在 設(shè)計(jì) 考慮 方面 扮演 了 更 重要 的 角色。
邊緣節(jié)點(diǎn)
與DAQ集中式架構(gòu)相比,邊緣節(jié)點(diǎn)架構(gòu)處于解決方案集成水平的另一端。在 基于 邊緣 節(jié)點(diǎn) 的 系統(tǒng) 上, 傳感器、DAQ 信號(hào) 鏈 和 信號(hào) 處理 單元 都 位于 非常 近 的位置。信號(hào)在邊緣被感測(cè)、采集和處理。處理后的數(shù)據(jù)通過有線或無線通信鏈路發(fā)送到主機(jī)。

圖2.邊緣節(jié)點(diǎn)系統(tǒng)架構(gòu)。
許多電池供電的智能狀態(tài)監(jiān)測(cè)系統(tǒng)采用邊緣節(jié)點(diǎn)架構(gòu),具有以下優(yōu)點(diǎn):
易于安裝。特別是對(duì)于無線系統(tǒng),安裝邊緣節(jié)點(diǎn)系統(tǒng)在傳感節(jié)點(diǎn)之間布線可能很長(zhǎng)的電纜需要更少的努力。
優(yōu)化設(shè)計(jì)。由于整個(gè)系統(tǒng)更加明確和獨(dú)立,因此更容易設(shè)計(jì)優(yōu)化的信號(hào)鏈。
采用邊緣節(jié)點(diǎn)架構(gòu)的CM系統(tǒng)的典型DAQ信號(hào)鏈設(shè)計(jì)要求是:
性能。準(zhǔn)確 了解 需要 將 哪些 傳感器 連接 到 DAQ , 可以 定制 DAQ 信號(hào) 鏈 設(shè)計(jì) 并 提高 效率。然而,有限的功率預(yù)算,特別是在電池供電的系統(tǒng)中,可能會(huì)限制傳感器和信號(hào)鏈的性能。
輸入保護(hù)。由于系統(tǒng)是獨(dú)立的,模擬DAQ信號(hào)鏈不會(huì)暴露在外界。這放寬了模擬DAQ信號(hào)鏈輸入保護(hù)的要求。
混疊拒絕。同樣,傳感器和DAQ系統(tǒng)之間的短距離,加上獨(dú)立的物理結(jié)構(gòu),使得邊緣節(jié)點(diǎn)系統(tǒng)不太可能拾取帶外干擾。DAQ 系統(tǒng) 可能 仍 需要 一定 程度 的 濾波 來 保護(hù) 其 免受 來自 節(jié)點(diǎn) 內(nèi)部 的 干擾, 例如 來自 傳感器 時(shí)鐘 偽 器、 電源 和 通信 鏈路 的 干擾, 但 所需 的 抑制 水平 低于 DAQ 集中 式 系統(tǒng)。
功率和面積。低功耗和緊湊的解決方案尺寸是邊緣節(jié)點(diǎn)系統(tǒng)的常見要求。低功耗對(duì)于電池供電系統(tǒng)至關(guān)重要。系統(tǒng)的尺寸會(huì)影響系統(tǒng)外殼的材料成本、安裝的難易程度,對(duì)于振動(dòng)傳感系統(tǒng),還會(huì)影響傳感器的機(jī)械特性。
DAQ 分布式 系統(tǒng)
DAQ 分布式 架構(gòu) 位于 DAQ 集中 式 和 邊緣 節(jié)點(diǎn) 架構(gòu) 之間。在這種架構(gòu)中, DAQ 信號(hào)鏈位于傳感器側(cè),數(shù)據(jù)處理能力有限或沒有。采集的傳感器數(shù)據(jù)通過RS-485或10BASE-T1L以太網(wǎng)等數(shù)字有線鏈路傳送到集中式主機(jī)進(jìn)行后處理。
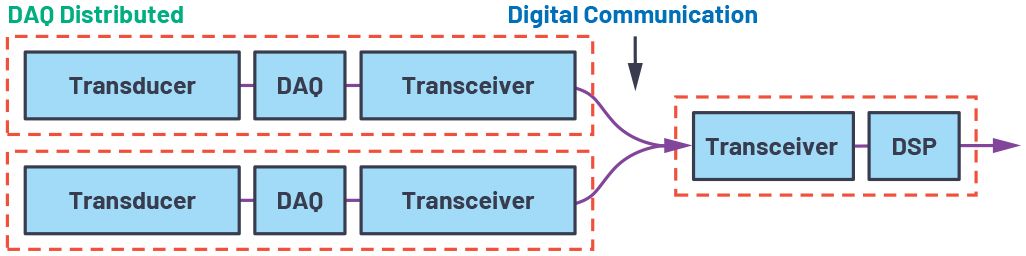
圖3.DAQ 分布式 系統(tǒng) 架構(gòu)。
DAQ 分布式 架構(gòu) 的 優(yōu)勢(shì) 包括 更 標(biāo)準(zhǔn) 化 的 通信 接口 和 更好 與 更大 工廠 自動(dòng) 化 系統(tǒng) 的 集成。
DAQ 分布式 系統(tǒng) 的 信號(hào) 鏈 設(shè)計(jì) 考慮 因素 與 邊緣 節(jié)點(diǎn) 系統(tǒng) 類似。
傳感器
傳感模態(tài)
選擇用于狀態(tài)監(jiān)測(cè)系統(tǒng)的傳感器取決于幾個(gè)因素,第一個(gè)因素是要支持的傳感方式。就像醫(yī)生會(huì)監(jiān)測(cè)患者的多個(gè)生命體征以更好地診斷他/她的健康狀況一樣,監(jiān)測(cè)資產(chǎn)的多個(gè)參數(shù)可以提高故障檢測(cè)的準(zhǔn)確性。例如,振動(dòng)監(jiān)測(cè)已被證明是在開發(fā)的早期階段檢測(cè)機(jī)械故障的可靠方法。溫度是CM中另一個(gè)重要的補(bǔ)充參數(shù),因?yàn)樵S多故障類型會(huì)產(chǎn)生熱量。其他常用傳感模式 CM 包括聲音、電能質(zhì)量、應(yīng)變、扭矩和位移。給定CM系統(tǒng)所需的傳感模式的確切組合還取決于被監(jiān)控的資產(chǎn)類型以及要檢測(cè)的故障類型。
傳感器類型
對(duì)于相同的傳感模式,還可以有多種傳感器類型可供選擇。不同類型的傳感器可能具有不同的性能和接口要求,并且沒有一種適合所有CM系統(tǒng)。
以振動(dòng)監(jiān)測(cè)為例。常見的振動(dòng)傳感器類型包括MEMS、壓電(壓電)和壓阻(動(dòng)態(tài)應(yīng)變片)。MEMS加速度計(jì)功耗低、重量輕、尺寸小,非常適合采用邊緣節(jié)點(diǎn)架構(gòu)的系統(tǒng)。壓電加速度計(jì)可以支持非常寬的帶寬并具有高動(dòng)態(tài)范圍。帶有IEPE接口的壓電傳感器與許多振動(dòng)監(jiān)測(cè)儀器兼容,可以一起使用,以構(gòu)建具有DAQ集中式架構(gòu)的CM系統(tǒng)。
這兩種傳感器的接口要求也大不相同。一些MEMS加速度計(jì)具有數(shù)字輸出,可以直接連接到微處理器。大多數(shù)高性能MEMS加速度計(jì)具有模擬輸出,需要數(shù)據(jù)采集信號(hào)鏈。MEMS傳感器通常可以由與DAQ信號(hào)鏈共享的單端3.3 V至5 V電源供電。相比之下,帶有IEPE接口的壓電加速度計(jì)通常由~4 mA恒流源供電,通過2芯電纜在24 V電源上產(chǎn)生,傳感器輸出為頂部的交流信號(hào) 直流偏置電壓(通常為8 V至10 V),通常需要對(duì)其進(jìn)行緩沖、衰減和電平轉(zhuǎn)換,然后才能由ADC采集。
通道數(shù)
另一個(gè)與傳感器相關(guān)的考慮因素是要使用的傳感器數(shù)量,這直接影響所需的DAQ通道數(shù)量。CM系統(tǒng)可以在多個(gè)位置部署相同的傳感器類型,以提供更完整的資產(chǎn)狀況。例如,一對(duì)振動(dòng)傳感器可以正交放置,以提供有關(guān)資產(chǎn)振動(dòng)幅度的更準(zhǔn)確信息。3軸振動(dòng)傳感器可以安裝在任何角度位置,并且仍然對(duì)所有方向的振動(dòng)具有完全的靈敏度。某些故障診斷方法還依賴于多個(gè)信號(hào)之間的相位差來對(duì)故障位置進(jìn)行三角測(cè)量。這 要求 CM 系統(tǒng) 同時(shí) 從 多個(gè) 相同 類型 的 傳感器 采集 信號(hào), 這 需要 對(duì) DAQ 信號(hào) 鏈 進(jìn)行 同步 采樣、 相位 匹配 和 通道 采樣 同步 要求。
分析方法
分析方法的選擇在DAQ信號(hào)鏈設(shè)計(jì)決策中也起著關(guān)鍵作用。
頻域分析
頻域分析是用于監(jiān)測(cè)移動(dòng)機(jī)械的常用CM方法。旋轉(zhuǎn)機(jī)器基頻倍數(shù)的諧波可以通過振動(dòng)、聲音和電能質(zhì)量等傳感方式來檢測(cè)。確定這些諧波的振幅和頻率是分析機(jī)器運(yùn)行條件的第一個(gè)基本步驟。
頻域信息可以通過使用快速傅里葉變換(FFT)轉(zhuǎn)換時(shí)域樣本來獲得。頻率 分析 中 要 考慮 的 關(guān)鍵 DAQ 信號(hào) 鏈 設(shè)計(jì) 參數(shù) 包括:
感興趣的帶寬。感興趣的測(cè)量范圍取決于被監(jiān)控資產(chǎn)的屬性和故障覆蓋的類型。監(jiān)測(cè)齒輪箱軸承所需的振動(dòng)監(jiān)測(cè)帶寬可能明顯高于監(jiān)測(cè)風(fēng)塔結(jié)構(gòu)擺動(dòng)所需的帶寬。整個(gè)監(jiān)控信號(hào)鏈應(yīng)具有足夠的帶寬,以覆蓋目標(biāo)的最高頻率分量。
幅度平坦度。頻率分析通常需要在目標(biāo)頻率上具有平坦的幅度響應(yīng),也就是說,增益應(yīng)在整個(gè)頻率范圍內(nèi)保持恒定。頻率的幅度響應(yīng)變化可能來自傳感器響應(yīng)和DAQ信號(hào)鏈內(nèi)濾波的響應(yīng)。通過選擇在目標(biāo)頻帶上具有平坦響應(yīng)的傳感器并將濾波器設(shè)計(jì)為具有平坦通帶響應(yīng),可以實(shí)現(xiàn)良好的平坦度。
帶外信號(hào)抑制。目標(biāo)頻帶外的信號(hào)對(duì)CM系統(tǒng)毫無用處,并且會(huì)消耗寶貴的處理能力,甚至污染目標(biāo)信號(hào)。DAQ信號(hào)鏈最好去除目標(biāo)頻帶外的所有信號(hào)。
噪聲。就像信號(hào)平坦度一樣,測(cè)量系統(tǒng)希望在目標(biāo)頻帶上具有均勻平坦的噪聲頻譜密度(NSD)。本底噪聲應(yīng)低于目標(biāo)的最小信號(hào)幅度。FFT工藝還有一個(gè)額外的好處,即由于處理增益,可以降低頻域輸出中的整體本底噪聲。一個(gè)簡(jiǎn)單的解釋是,處理的樣本越多,箱子尺寸越窄,每個(gè)箱內(nèi)的功率越低。這允許測(cè)量系統(tǒng)人為地增加其測(cè)量動(dòng)態(tài)范圍(僅在頻域中),以檢查原本低于本底噪聲的信號(hào)。處理增益的限制在于它需要大內(nèi)存和更長(zhǎng)的處理時(shí)間。測(cè)量信號(hào)鏈的無雜散動(dòng)態(tài)范圍(SDFR)還可以設(shè)置要測(cè)量的最小有效信號(hào)幅度。
動(dòng)態(tài)線性度。低諧波失真對(duì)于頻域諧波分析非常重要。由測(cè)量信號(hào)鏈的非線性引起的額外諧波可以掩蓋由故障條件引起的實(shí)際諧波信號(hào)的偏差。
時(shí)域分析
頻域分析僅限于監(jiān)測(cè)周期性信號(hào),例如旋轉(zhuǎn)機(jī)械固有產(chǎn)生的信號(hào)。對(duì)于以非周期方式運(yùn)行的資產(chǎn)(例如,線性和往復(fù)運(yùn)動(dòng))以及基于特定時(shí)間運(yùn)行的資產(chǎn)(例如液壓/氣缸),需要進(jìn)行時(shí)域分析。即使對(duì)于監(jiān)測(cè)旋轉(zhuǎn)機(jī)械,某些分析方法,如沖擊脈沖法,也依賴于時(shí)域數(shù)據(jù)分析。
時(shí)域信息可以通過簡(jiǎn)單地分析采樣數(shù)據(jù)波形來獲得。時(shí)間分析時(shí)要考慮的關(guān)鍵DAQ信號(hào)鏈設(shè)計(jì)參數(shù)包括:
感興趣的帶寬。測(cè)量信號(hào)鏈的帶寬應(yīng)足夠?qū)挘悦庠谧罡吣繕?biāo)頻率下使信號(hào)波形失真。通常不是瞬態(tài)事件發(fā)生的頻率,而是瞬態(tài)事件引起的信號(hào)振蕩頻率決定了測(cè)量帶寬要求。在某些情況下,例如使用沖擊脈沖方法進(jìn)行監(jiān)測(cè),瞬態(tài)事件引起的信號(hào)振蕩由傳感器的諧振頻率設(shè)定。
采樣率。與頻率分析(其中有效信號(hào)采樣率原則上不需要高于要監(jiān)控的最高頻率分量的兩倍)相反,時(shí)域分析的采樣率要求可能需要遠(yuǎn)高于目標(biāo)的最高輸入信號(hào)頻率。這是由于信號(hào)的瞬態(tài)性質(zhì) 被監(jiān)控。瞬態(tài)信號(hào)的過采樣使得分析信號(hào)波形的輪廓變得容易,包括其峰值和谷值幅度以及變化率。最大誤差峰值比可以從 1–cos (π/OS) 得出,其中 OS 是過采樣比,等于輸入信號(hào)頻率范圍內(nèi)的有效采樣率。10×瞬態(tài)信號(hào)振蕩頻率的過采樣會(huì)使峰值檢測(cè)精度限制在±5%以下。
噪聲。由于每個(gè)樣本中包含的噪聲會(huì)直接影響時(shí)域波形的幅度檢測(cè)精度,因此總均方根噪聲值在時(shí)域分析中至關(guān)重要。噪聲頻譜密度的平坦度并不重要,只要有效噪聲帶寬上的總積分噪聲滿足所需的測(cè)量精度即可。噪聲改善DSP技術(shù),如FFT過程增益,在時(shí)域分析中不再可用。
階躍響應(yīng)。測(cè)量信號(hào)鏈需要具有良好的階躍響應(yīng),以便正確復(fù)制瞬態(tài)信號(hào)輸入的曲線。這會(huì)影響DAQ信號(hào)鏈中的濾波器設(shè)計(jì)和選擇。
DAQ 信號(hào)鏈 設(shè)計(jì) 示例
在 本節(jié) 中, 我們 將 使用 兩 個(gè) CM 系統(tǒng) DAQ 信號(hào) 鏈 示例 來 展示 如何 將 系統(tǒng) 要求 轉(zhuǎn)換 到 信號(hào) 鏈 設(shè)計(jì) 中。
例 1
系統(tǒng)要求
邊緣節(jié)點(diǎn)架構(gòu)中的 3 V 至 3.6 V 電池供電系統(tǒng)
單軸振動(dòng)感應(yīng),量程為 ±50 g
支持高達(dá) 10 kHz(平坦)帶寬的頻率分析
動(dòng)態(tài)范圍 >10 kHz 帶寬內(nèi)為 80 dB
支持時(shí)域分析,包括沖擊脈沖法,采樣率為128 kSPS
在滿量程范圍內(nèi)等于或小于動(dòng)態(tài)非線性度的0.1%。
能夠在嘈雜的環(huán)境中工作,并能夠抑制電磁干擾(EMI)。
傳感器選擇
選擇ADXL1002MEMS加速度計(jì)進(jìn)行振動(dòng)檢測(cè)。它符合關(guān)鍵性能標(biāo)準(zhǔn),具有非常適合邊緣節(jié)點(diǎn)系統(tǒng)的低功耗和小外形尺寸。
ADXL1002具有11 kHz的平坦響應(yīng)帶寬,非常適合在目標(biāo)帶寬為10 kHz的頻率分析。傳感器的諧振頻率為21 kHz。可以對(duì)該頻率的信號(hào)進(jìn)行過采樣,以支持時(shí)域分析方法,例如沖擊脈沖法。
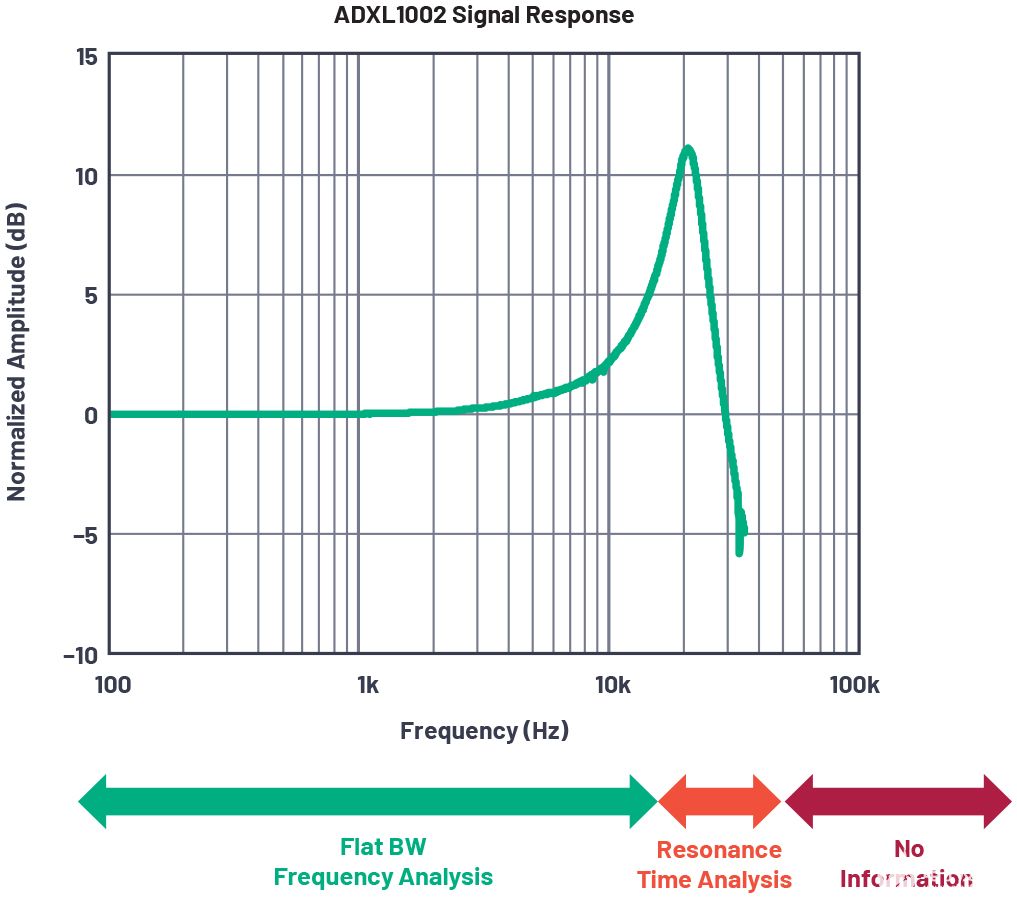
圖5.ADXL1002加速度計(jì)的頻率響應(yīng)分頻。
該傳感器的噪聲密度為 25 μg/√Hz,最高可達(dá) 10 kHz。如果10 kHz帶寬上的總均方根噪聲為25 × √(10e3)= 2.5 mg rms 輸入范圍為 ±50g,傳感器的動(dòng)態(tài)范圍可通過下式計(jì)算

ADXL1002的輸出為緩沖電壓信號(hào),幅度與感測(cè)加速度和傳感器電源電壓成正比。輸出信號(hào)偏置在等于傳感器電源電壓一半的直流電壓下。采用5 V電源供電時(shí),ADXL1002的靈敏度為40 mV/g。采用 3.3 V 電源時(shí),±50g輸入范圍內(nèi)的最大傳感器輸出信號(hào)擺幅為 ±50 × 40e–3/5 × 3.3 = ±1.32 V,中心電壓為

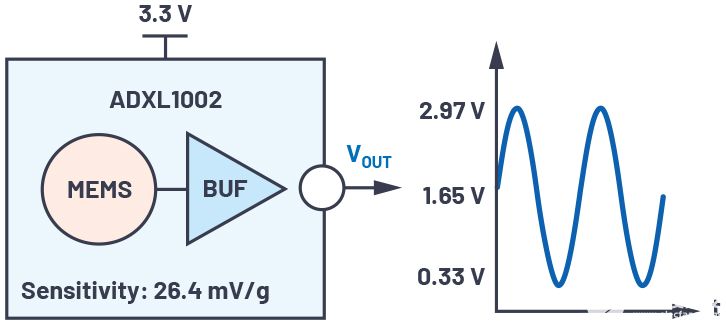
圖6.ADXL1002的滿量程輸出信號(hào)。
數(shù)據(jù)采集要求
與ADXL1002傳感器接口的DAQ信號(hào)鏈需要滿足以下要求:
支持傳感器的整個(gè)輸出電壓范圍
具有超過 11 kHz 的平坦頻率響應(yīng)
能夠?qū)χC振頻率進(jìn)行至少5次過采樣×
讓傳感器主導(dǎo)整體交流和直流性能
為目標(biāo)頻帶外的信號(hào)提供足夠的混疊抑制
低功耗
解決方案尺寸小
建議的解決方案如圖7所示。它由單通道精密Σ-Δ型ADC AD7768-1和ADC驅(qū)動(dòng)放大器ADA4805-1組成。
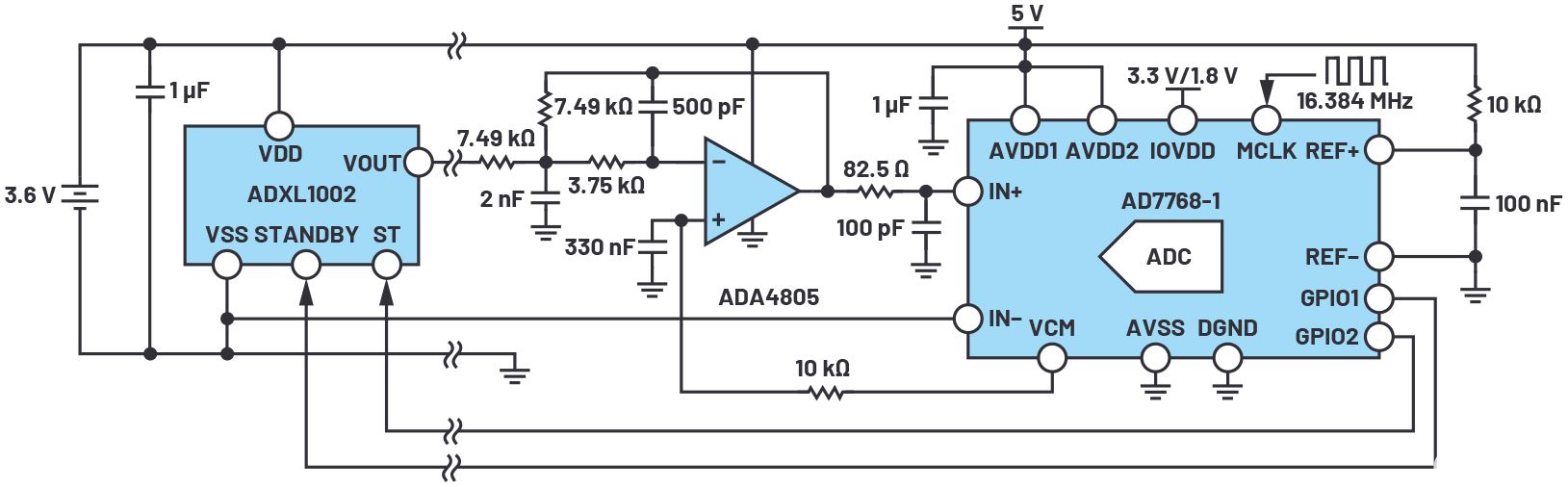
圖7.電池供電邊緣節(jié)點(diǎn)傳感器解決方案的DAQ信號(hào)鏈?zhǔn)纠摻鉀Q方案支持使用ADXL1002加速度計(jì)進(jìn)行單軸振動(dòng)檢測(cè)。
AD7768-1是一款多功能精密ADC,具有多種工作模式,可在功耗、帶寬和噪聲之間進(jìn)行權(quán)衡。可編程數(shù)字濾波器對(duì)于混疊抑制至關(guān)重要,可以使用不同的濾波器類型來支持頻域和時(shí)域分析。
在此設(shè)計(jì)中,我們選擇使用以下配置操作設(shè)備:
在 REF+ 輸入上啟用集成基準(zhǔn)電壓緩沖器
低功耗模式
低紋波寬帶濾波器,具有 32 kSPS ODR(濾波器選項(xiàng) A)
具有 128 kSPS ODR 的 Sinc5 濾波器(濾波器選項(xiàng) B)
集成的基準(zhǔn)電壓緩沖器可實(shí)現(xiàn)非常緊湊的設(shè)計(jì),并且無需額外的緩沖放大器。該設(shè)計(jì)利用了ADXL1002輸出與其電源電壓之間的比例關(guān)系,以及AD7768-1的基準(zhǔn)電壓緩沖器支持軌到軌操作的事實(shí),方法是在傳感器和ADC之間共享3.3 V電池電源,并使用與ADC基準(zhǔn)電壓相同的電壓。這不僅消除了為DAQ信號(hào)鏈生成專用基準(zhǔn)電壓的需要,而且還消除了由于電源電壓變化(例如電池放電隨時(shí)間變化)而導(dǎo)致的任何測(cè)量信號(hào)幅度變化。
低功耗模式操作使ADC的功耗降至最低,從而最大限度地延長(zhǎng)電池壽命。在低功耗模式下,AD7768-1可以支持磚墻式低紋波寬帶濾波器,在ODR為32 kSPS(濾波器選項(xiàng)A)時(shí)具有13 kHz平坦(–0.1 dB)帶寬,非常適合覆蓋ADXL1002的11 kHz平坦帶寬,以執(zhí)行頻率分析。磚墻濾波器具有近乎理想的濾波器輪廓,非常適合頻率分析,但高階濾波器使其不太適合執(zhí)行時(shí)域分析。因此,可以使用具有較大階躍響應(yīng)的sinc5濾波器來滿足時(shí)域分析的需求。低功耗模式下的AD7768-1內(nèi)置sinc5濾波器,支持高達(dá)128 kSPS的輸出數(shù)據(jù)速率和26 kHz時(shí)的–3 dB頻率(濾波器選項(xiàng)B),足以對(duì)傳感器的21 kHz諧振頻率進(jìn)行過采樣5×以上。數(shù)字濾波器類型和輸出數(shù)據(jù)速率均通過SPI接口進(jìn)行寄存器編程,允許信號(hào)帶寬 根據(jù)應(yīng)用需求動(dòng)態(tài)調(diào)整。
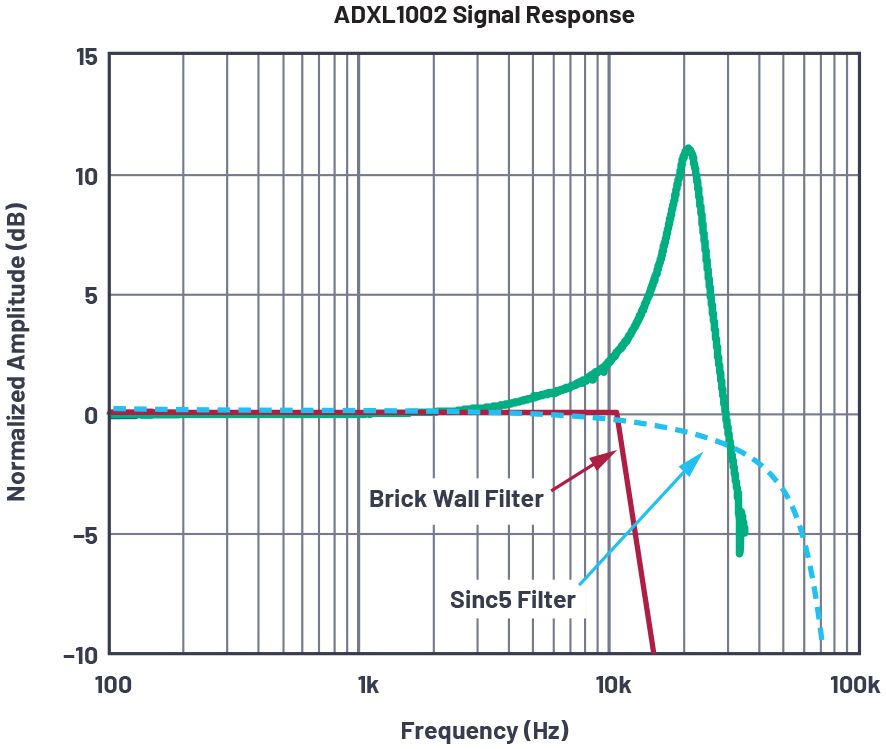
圖8.如何將不同的數(shù)字濾波器響應(yīng)用于不同的測(cè)量要求。
與將未濾波的過采樣數(shù)據(jù)發(fā)送到外部數(shù)字主機(jī)進(jìn)行后處理相比,AD7768-1上的集成數(shù)字濾波器大大提高了數(shù)字處理的能效。AD7768-1在低功耗模式下的功耗(AVDD1、AVDD2和IOVDD采用3.3 V電源,REF+引腳使能時(shí),估計(jì)功耗為10.2 mW,帶寬為32 kSPS ODR的寬帶低紋波濾波器為12.6 mW。
在此配置中,AD7768-1的噪聲對(duì)于濾波器選項(xiàng)A為11.5 μV rms,對(duì)于濾波器選項(xiàng)B為49.5 μV rms。本設(shè)計(jì)中ADC的輸入信號(hào)是±1.32 V的偽差分信號(hào)。具有此輸入范圍和濾波器選項(xiàng)A的ADC的有效動(dòng)態(tài)范圍為20 × log(1.32/√(2)/11.5e–6) = 98 dB,使用濾波器選項(xiàng) B 時(shí)為 85.5 dB。兩者都足以讓傳感器主導(dǎo)整體噪聲性能。
AFE 設(shè)計(jì)
雖然ADXL1002具有緩沖輸出,但在ADC的采樣頻率(2.048 MHz)下,其輸出阻抗不夠低,無法在采樣期間完全建立ADC的輸入。建議使用寬帶寬驅(qū)動(dòng)器放大器將傳感器與ADC橋接。選擇ADA4805-1是基于其寬帶寬、低輸出阻抗、低噪聲、小尺寸、 和低功耗。
由于ADC和驅(qū)動(dòng)放大器組合的噪聲性能低于傳感器的噪聲性能,因此無需增益?zhèn)鞲衅鞯妮敵鲂盘?hào)。ADA4805-1具有軌到軌輸出,但沒有軌到軌輸入。因此,驅(qū)動(dòng)器配置為增益為1的反相緩沖器。驅(qū)動(dòng)器的輸出裕量經(jīng)過驗(yàn)證,可滿足滿量程信號(hào)擺幅。
AD7768-1的數(shù)字濾波器在ADC采樣頻率附近的頻帶上也沒有抑制。利用ADA4805-1構(gòu)建一個(gè)有源抗混疊濾波器,以幫助數(shù)字濾波器在整個(gè)頻率范圍內(nèi)實(shí)現(xiàn)足夠的整體帶外信號(hào)抑制。該設(shè)計(jì)是一款二階低通濾波器,具有多反饋架構(gòu)和近巴特沃茲響應(yīng),轉(zhuǎn)折頻率為–3 dB 在 32 Hz 時(shí)和 –73 dB 的抑制(在 2 MHz 時(shí))。
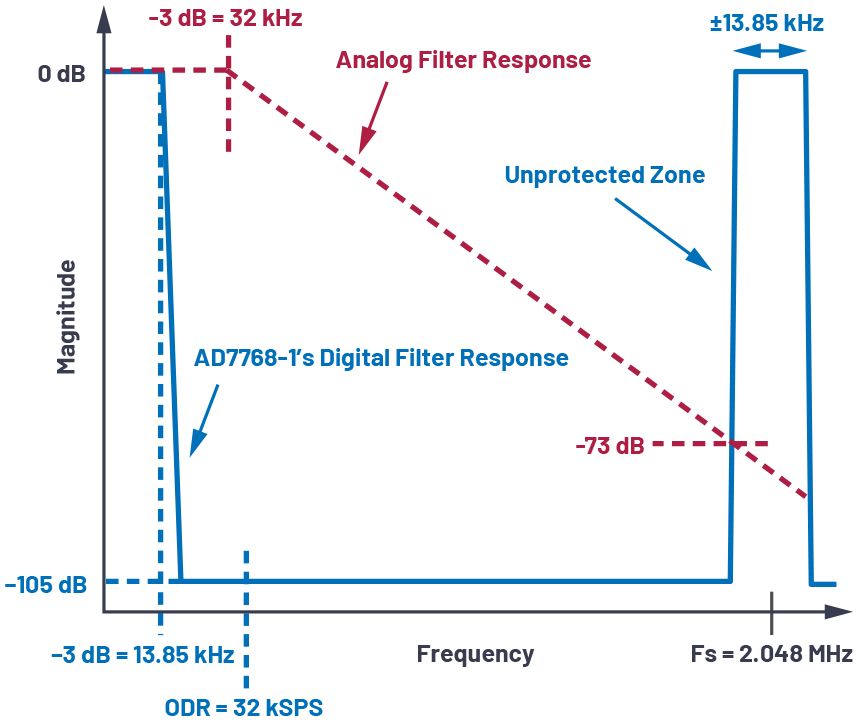
圖9.示例1信號(hào)鏈的整體濾波器響應(yīng)。
驅(qū)動(dòng)器電路中使用的電阻值經(jīng)過精心選擇,以平衡功耗、電路噪聲、電容尺寸和ADA4805-1輸入偏置電流引起的直流失調(diào)誤差。
組合信號(hào)鏈的整體性能如表1所示。
| 傳感器 特性 | 數(shù)據(jù)采集 特性 | ||
| 滿量程 測(cè)量憤怒 | ±50g(0.33 V 至 2.97 V) | 最大輸入范圍 | 0.02 V 至 3.28 V |
| 最大平坦帶寬 (3 分貝) | 11 千赫 | 最大平坦帶寬 (–3 dB) | 13.8千赫 |
| 共鳴 頻率 | 21千赫 | Sinc5 過濾器外徑最大 | 128 kSPS (–3 dB 帶寬 = 26 kHz) |
| 動(dòng)態(tài)范圍 超過 13.8 kHz 帶寬 | 80分貝* | 動(dòng)態(tài)范圍超過 13.8 kHz 帶寬 | 98分貝 |
| 線性 | 全范圍為 0.1% | 線性 | 在整個(gè)范圍內(nèi)優(yōu)于 0.001% |
| 功耗 采用 3.3 V 電源供電 | 3.3毫瓦 | 功耗 | 14毫瓦 |
| 包裝尺寸 | 25 毫米2 | IC封裝總尺寸 | 28 毫米2 |
| *根據(jù)輸出噪聲曲線估算 | |||
例 2
系統(tǒng)要求
DAQ 集中式架構(gòu)中的 DAQ 模 塊, 具有 通道 間 隔離 的 DAQ 模 塊
偽差分輸入,最大輸入范圍為 ±12 V
支持IEPE接口
交流和直流偏置輸入選項(xiàng)
高達(dá) ±60 V 的輸入過壓保護(hù)
1 MΩ 輸入阻抗
支持高達(dá) 100 kHz(平坦)帶寬的頻率分析
動(dòng)態(tài)范圍 >105 kHz 帶寬內(nèi)為 100 dB
無混疊(能夠抑制目標(biāo)頻帶外的所有信號(hào) –105 dB)
支持時(shí)域分析,包括沖擊脈沖法
總諧波失真為 ≤–115 dB,滿量程輸入為 1 kHz
高直流精度
支持可編程濾波器帶寬和輸出數(shù)據(jù)速率
建議的解決方案如圖10所示。它使用與示例1相同的24位精密Σ-Δ型ADC (AD7768-1)。模擬前端包括一個(gè)ADG5421F輸入保護(hù)開關(guān)、一個(gè)用于提供IEPE傳感器電源電流的LT3092恒流源、一個(gè)精密JFET緩沖放大器ADA4610-1、一個(gè)用于ADC驅(qū)動(dòng)的全差分放大器ADA4945-1,以及一個(gè)抗混疊濾波器結(jié)構(gòu)。精密基準(zhǔn)電壓源ADR444用于在精密運(yùn)算放大器ADA4528-1作為基準(zhǔn)電壓緩沖器的幫助下向ADC提供基準(zhǔn)電壓源。
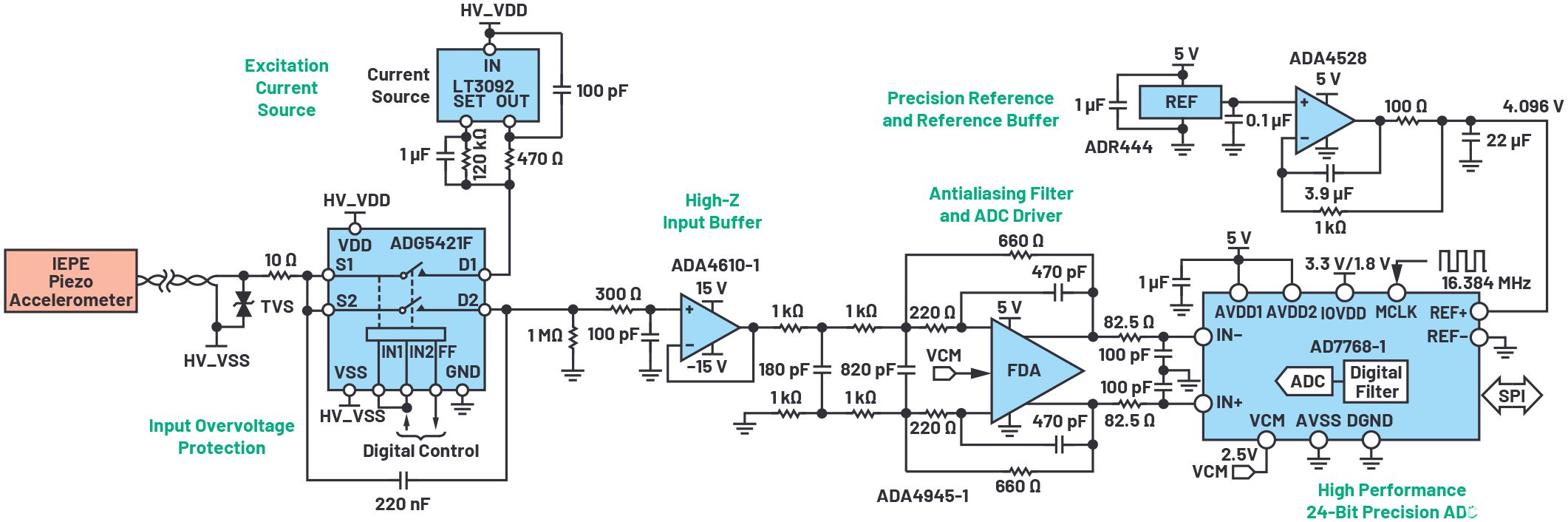
圖 10.支持直接IEPE傳感器接口和通道間隔離的DAQ集中式解決方案的DAQ信號(hào)鏈?zhǔn)纠?/p>
傳感器電源
IEPE接口為2線接口,傳感器輸出信號(hào)(電壓)和傳感器電源(電流)共用同一根線。LT3092用于在30 V電源上構(gòu)建一個(gè)低噪聲2.5 mA電流源,為傳感器供電。電流值可通過電阻值進(jìn)行編程,以支持更長(zhǎng)的電纜長(zhǎng)度/更高的電纜電容。
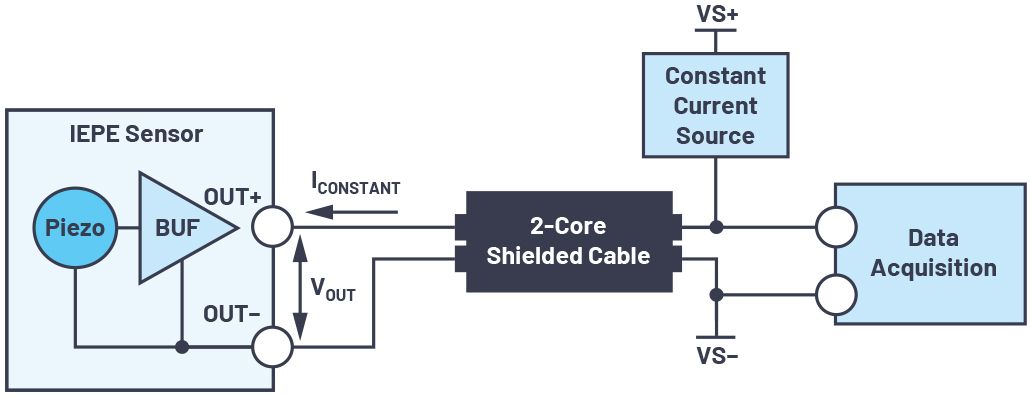
圖 11.只需一根 2 芯電纜即可與 IEPE 傳感器連接。
一些IEPE傳感器不是外殼隔離的,這意味著它們的OUT-端子可能連接到本地接地。如果傳感器接口DAQ也不是隔離的,那么DAQ也需要接地參考。在這種設(shè)計(jì)中,DAQ通道是隔離的。這有助于消除接地和電源電平限制,允許DAQ設(shè)計(jì)為雙極性電源,以支持更對(duì)稱的 雙極性輸入信號(hào)。
輸入保護(hù)
采用ADG5421F保護(hù)開關(guān)為電路提供輸入過壓保護(hù)。當(dāng)輸入電壓超過電源范圍時(shí),內(nèi)部開關(guān)斷開,以保護(hù)DAQ信號(hào)鏈的其余部分。ADG5421F可承受高達(dá)±60 V的輸入電壓,其低而穩(wěn)定的R電壓上對(duì)于最小化信號(hào)失真至關(guān)重要。
在此設(shè)計(jì)中,該開關(guān)還用于為信號(hào)鏈輸入配置提供可編程選項(xiàng)。根據(jù)開關(guān)配置,信號(hào)鏈輸入可配置為交流或直流耦合,電流源可獨(dú)立切換進(jìn)出。
附加一個(gè)TVS與一個(gè)小(10 Ω)串聯(lián)電阻器一起,以幫助改善輸入節(jié)點(diǎn)的ESD保護(hù)。
模數(shù)轉(zhuǎn)換器選擇
通道隔離要求推動(dòng)了對(duì)單通道DAQ解決方案的需求。
這兩個(gè)示例展示了AD7768-1的多功能性。在全功率模式下工作時(shí),該ADC能夠使用磚墻數(shù)字濾波器(ODR = 256 kSPS)實(shí)現(xiàn)110 kHz的平坦帶寬,同時(shí)仍能實(shí)現(xiàn)108 dB的動(dòng)態(tài)范圍(基準(zhǔn)電壓為4.096 V)。它還支持用于時(shí)域波形捕獲的sinc5濾波器,最大輸出數(shù)據(jù)速率為1.024 MSPS。
AD7768-1還具有業(yè)界領(lǐng)先的動(dòng)態(tài)線性度和直流性能。這包括典型THD為–120 dB,1 kHz接近滿量程正弦輸入信號(hào),失調(diào)誤差漂移為300 nV/°C,增益誤差漂移為0.25 ppm。
對(duì)于不需要通道隔離的多通道DAQ系統(tǒng),可以使用同一ADC的四通道(AD7768-4)或八通道(AD7768)版本。
AFE 設(shè)計(jì)
輸入信號(hào)需要緩沖以達(dá)到所需的阻抗。緩沖放大器需要具有低輸入偏置電流、低噪聲、良好的動(dòng)態(tài)線性度、高直流精度和足夠的帶寬。ADA4610-1JFET運(yùn)算放大器是根據(jù)這些要求選擇的。它配置為單位增益緩沖器,需要±15 V電源。
然后需要對(duì)信號(hào)進(jìn)行衰減和電平轉(zhuǎn)換,以適應(yīng)ADC的輸入范圍。希望將偽差分信號(hào)轉(zhuǎn)換為全差分信號(hào)。這種轉(zhuǎn)換將測(cè)量動(dòng)態(tài)范圍提高了6 dB,并大大降低了二次諧波失真。然后需要對(duì)信號(hào)進(jìn)行濾波以抑制混疊,并使用高帶寬和低輸出阻抗ADC驅(qū)動(dòng)器放大器進(jìn)行緩沖,以確保ADC輸入正確建立。幸運(yùn)的是,所有這些功能都可以通過使用單個(gè)ADA4945-1全差分ADC驅(qū)動(dòng)器放大器的電路設(shè)計(jì)來實(shí)現(xiàn),最小 失真和增加噪聲,同時(shí)保持出色的直流精度。
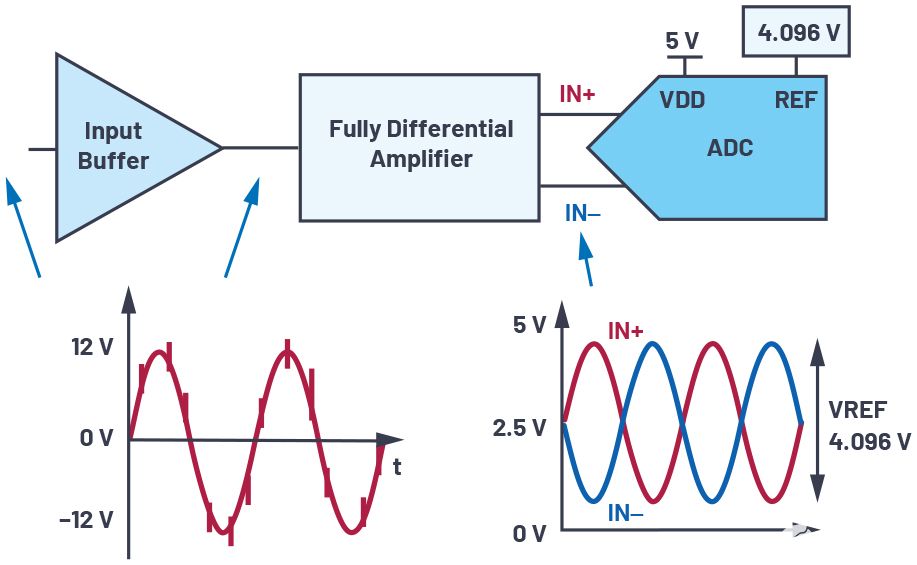
圖 12.模擬前端的信號(hào)調(diào)理。
在本電路中,信號(hào)衰減0.33,采用4.096 V ADC基準(zhǔn)電壓源時(shí),允許±4.096/0.33 = ±12.41 V滿量程輸入擺幅。信號(hào)以±4.096 V幅度轉(zhuǎn)換為全差分,電平轉(zhuǎn)換為2.5 V(中間電源)共模電壓,使FDA輸出和ADC輸入都滿意。
如示例1所述,AD7768-1的數(shù)字濾波器在ADC采樣頻率附近的頻帶上也沒有抑制。在全功率模式下,ADC的有效采樣頻率為16.384 MHz。ADA4945-1構(gòu)建了一個(gè)有源抗混疊濾波器,以幫助數(shù)字濾波器在整個(gè)頻率范圍內(nèi)實(shí)現(xiàn)足夠的整體帶外信號(hào)抑制。該設(shè)計(jì)是一個(gè)三階低通濾波器,具有多反饋架構(gòu)和接近巴特沃茲響應(yīng)。另一個(gè)低通極點(diǎn)由緩沖放大器ADA4610-1前面的RC電路增加,以幫助進(jìn)一步提高FS處的混疊抑制。整個(gè)信號(hào)鏈頻率響應(yīng)在440 kHz時(shí)具有–3 dB轉(zhuǎn)折,以最大程度地減小帶內(nèi)響應(yīng)的幅度和相位失真。AAF 在 100 kHz 時(shí)引起的幅度下降小于 10 mdB。16.3 MHz時(shí)的幅度響應(yīng)約為–108 dB。這與AD7768-1的磚墻數(shù)字濾波器相結(jié)合,產(chǎn)生一個(gè)無混疊信號(hào)鏈,能夠 抑制所有帶外信號(hào)至少 105 dB。
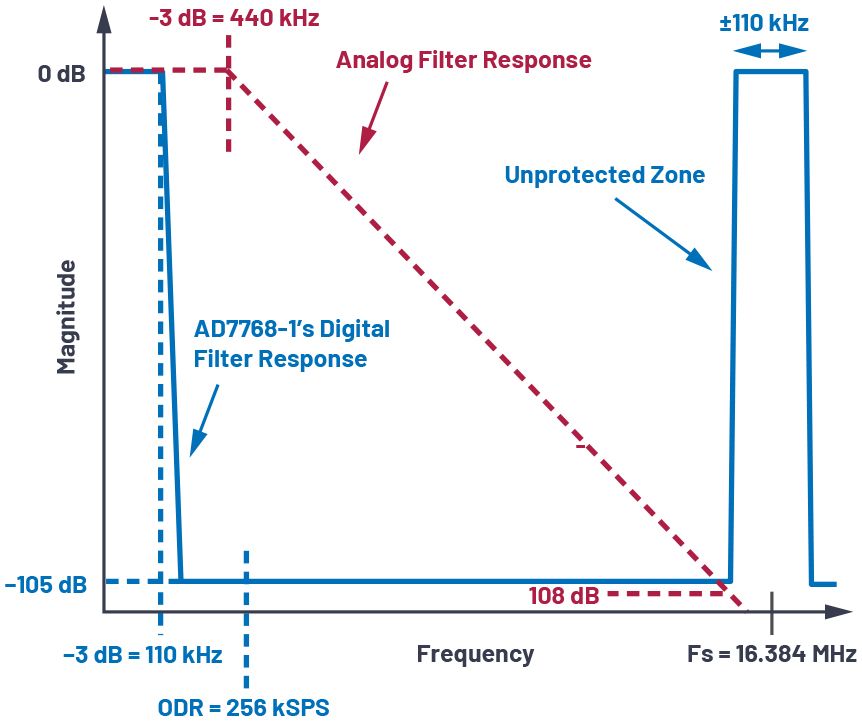
圖 13.示例2信號(hào)鏈的整體濾波器響應(yīng)。
隔離和電源管理
這里不詳細(xì)討論數(shù)字和電源隔離及電源管理解決方案。ADP1031等解決方案可在隔離范圍內(nèi)提供SPI接口以及±15 V和5 V電源電壓。ADuM140D高速數(shù)字隔離器可用于跨隔離提供MCLK和SYNC_IN信號(hào),以實(shí)現(xiàn)跨通道采樣同步。
|
數(shù)據(jù)采集特性 |
|||
| 最大輸入范圍 | ±12.4 V 偽差分 | ||
| 最大平坦帶寬 (–3 dB) | 110 千赫 | ||
| Sinc5 過濾器外徑最大 | 1024 kSPS (–3 dB 帶寬 = 209 kHz) | ||
| 動(dòng)態(tài)范圍超過 110 kHz 帶寬 | 優(yōu)于 105 dB | ||
| 接近滿量程輸入時(shí) 1 kHz 時(shí)的 THD | 優(yōu)于 –105 dB | ||
| 增益誤差漂移* | 10 頁(yè)/°C | ||
| 失調(diào)誤差漂移* | 5 μV/°C | ||
| 使用sinc5濾波器的功耗 | 110毫瓦 | ||
| 磚墻過濾器的功耗 | 130毫瓦 | ||
| *不包括電阻匹配誤差 | |||
例 3
CN0540描述了IEPE傳感器接口DAQ信號(hào)鏈設(shè)計(jì)的另一種方法。
CN0540設(shè)計(jì)支持0 V至24 V的單極性輸入范圍。它適用于與IEPE傳感器接口的非通道隔離DAQ系統(tǒng),無需外殼隔離,在這種情況下,IEPE傳感器和DAQ信號(hào)鏈共享一個(gè)公共接地。此設(shè)計(jì)支持直流耦合到 IEPE 傳感器。盡管壓電傳感器不支持低至直流的響應(yīng),但直流耦合使該信號(hào)鏈具有提取低頻振動(dòng)的優(yōu)勢(shì),而不會(huì)從低帶寬交流耦合電路中提取啟動(dòng)延遲。
相比之下,示例2所示的信號(hào)鏈設(shè)計(jì)支持雙極性輸入信號(hào)。它 需要 在 交流 耦合 模式 下 工作 才能 與 IEPE 傳感器 連接, 但 這種 ±12.4 V 輸入 范圍 和 高 輸入 阻抗 使其 更 適合 多 用途 DAQ 系統(tǒng)。
總結(jié)
總之,本文詳細(xì)介紹了系統(tǒng)架構(gòu)、傳感器類型和分析方法的選擇如何極大地影響狀態(tài)監(jiān)測(cè)系統(tǒng)中的DAQ信號(hào)鏈設(shè)計(jì)。本文討論的設(shè)計(jì)考慮因素以及示例參考設(shè)計(jì)有望幫助系統(tǒng)設(shè)計(jì)人員為其狀態(tài)監(jiān)測(cè)系統(tǒng)做出最佳設(shè)計(jì)選擇。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752148 -
濾波器
+關(guān)注
關(guān)注
160文章
7749瀏覽量
177737 -
DAQ
+關(guān)注
關(guān)注
6文章
91瀏覽量
32157
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
光鏈路實(shí)時(shí)監(jiān)測(cè)倒換系統(tǒng)
機(jī)器狀態(tài)監(jiān)測(cè)的高級(jí)算法及實(shí)現(xiàn)課程
基于CompactRIO的遠(yuǎn)程狀態(tài)監(jiān)測(cè)系統(tǒng)研究
醫(yī)療冷鏈監(jiān)控系統(tǒng)
采用LabVIEW實(shí)現(xiàn)橋梁運(yùn)行狀態(tài)長(zhǎng)期監(jiān)測(cè)系統(tǒng)
機(jī)泵狀態(tài)無線監(jiān)測(cè)系統(tǒng)方案
DSP怎么實(shí)現(xiàn)調(diào)幅廣播信號(hào)的監(jiān)測(cè)系統(tǒng)?
火電廠狀態(tài)監(jiān)測(cè)系統(tǒng)實(shí)施研究
基于PLC控制的船舶機(jī)艙監(jiān)測(cè)系統(tǒng)及其軟件實(shí)現(xiàn)
多路交通信號(hào)燈狀態(tài)監(jiān)測(cè)系統(tǒng)

基于STM32的軸承狀態(tài)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)


狀態(tài)監(jiān)控系統(tǒng)設(shè)計(jì)選項(xiàng)及其對(duì)信號(hào)鏈實(shí)施方案的影響
北斗桿塔狀態(tài)實(shí)時(shí)監(jiān)測(cè)系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論