 基于全天時單光子激光雷達背景噪聲抑制技術
基于全天時單光子激光雷達背景噪聲抑制技術
一、概述
單光子激光雷達具有極高的探測靈敏度,但也極易受到背景噪聲光子的干擾,這在很大程度上降低了其白天的探測性能,限制了其適用范圍。本文對全天時單光子激光雷達探測性能進行了分析,提出了一種新型的激光雷達背景噪聲抑制技術,能夠極大的提升單光子激光雷達在白天的探測性能。同時,本文還提出了一種普適性的ROI評價指數,能夠極為直觀的對各種激光雷達系統探測性能進行評價。
二、研究背景和意義
激光雷達作為一種高精度,高時間分辨率的主動探測技術,被廣泛應用于遙感、空間目標探測、高分辨率三維成像等諸多領域。而單光子激光雷達(又稱光子計數激光雷達)以時間相關單光子計數(Time-Correlated Single-PhotonCounting, TCSPC)機制,結合具有單光子級靈敏度的探測器件,能夠對極微弱的回波信號進行探測,從而獲得更遠的探測距離,成為了激光雷達探測技術的前沿和發展趨勢。然而,受限于探測器的死時間效應及其本身的概率檢測機制,單光子探測極易受到噪聲光子的干擾,尤其是白天工作時,除了信號回波外,由太陽輻射引起的散射的光子,不可避免的進入系統的接收視場內,成為背景噪聲,進而使其探測性能急劇下降。因此,對全天時單光子探測性能進行分析,提高其白天探測能力對于拓展單光子探測技術的適用范圍具有十分迫切的需求和極其重要的現實意義。
另外,為了能夠更為直觀的對同等系統資源需求下激光雷達探測性能進行評價,本文還提出了一種普適性的評價模型,即激光雷達系統的“投資回報率”ROI指數(Return On Investment)。該指數將激光雷達系統參數進行歸一化處理,以此來評價一個激光雷達系統探測是否更為“經濟”,能夠極為直觀的對激光雷達探測性能進行評估。
三、全天時單光子激光雷達探測
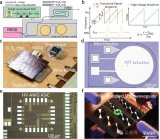
背景光噪聲抑制技術是提升激光雷達全天時工作能力的關鍵,為了實現更好的光譜濾波,我們采用反射式布拉格光柵作為核心濾波器件,搭建了一個超窄帶光譜濾波系統(Ultra-narrowband Spectral Filtering System,UNSFS),該系統的濾波帶寬約為50pm,透過率約為85%,中心波長 1029nm。同時,采用波長為 1029nm的 Yb:YAG 窄線寬脈沖激光器作為激光雷達光源,系統結構如圖1所示。激光重復頻率為1.6kHz,單脈沖能量為20μJ,發射束直徑為1mm。光學接收孔徑為25mm,接收視場為1.3mrad。透鏡收集的光線通過針孔后進入UNSFS,濾波后透射光線耦合到芯徑為100μm的多模光纖中,然后進入單光子探測器。激光的發射和接收光束由帶有中心孔的反射鏡進行空間合束,在中心孔旁邊放置PIN探測器,作為發射脈沖同步信號源。
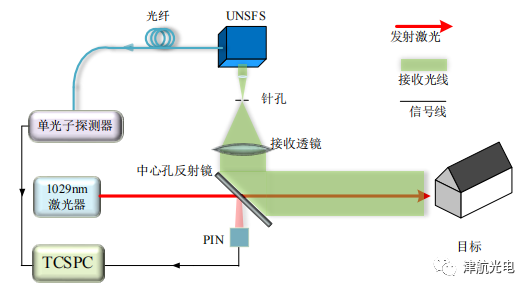
圖1單光子激光雷達系統結構
完成雷達系統搭建后,我們首先進行了單點測距實驗,實驗目標選擇為實驗室所能觀測到最遠的目標,成都市東側的龍泉山脈,從地圖上得知該山脈距離實驗地點的直線距離約為25km。實驗時天氣晴朗,能見度約22km。從上午10點到晚上10點,每小時進行一次探測,探測積累時間為1s(1600次),時間門寬度為16ns,結果見圖2。
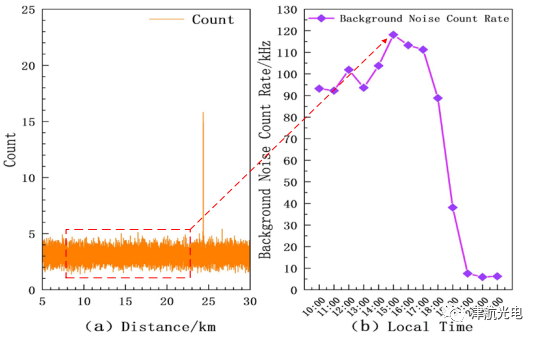
圖2單點測距實驗結果(a 為下午3點激光雷達回波光子計數距離直方圖;b 為全天背景噪聲計數率統計)
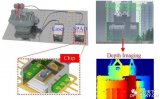
由圖可見,在強烈背景光條件下,激光雷達系統也擁有非常高的信噪比,全天最大的背景噪聲計數率僅為119kHz,遠低于其他的光子計數激光雷達系統(一般為幾兆Hz量級或者更多),系統擁有良好的日間工作能力。我們還進行了對城市區域的快速掃描三維成像實驗,掃描的目標我們選擇了成都市的地標建筑,成都金融城雙子塔,該建筑有著較為明顯的幾何特征。實驗時間選擇在下午四點陽光強烈的時刻,當天能見度約為10km,整個掃描視場為1°×1°,掃描的圖像分辨率為100×141。得益于本系統優異的背景噪聲抑制能力,使得整個探測掃描的時間大為縮短,這對于遠距離三維成像來說至關重要。整個掃描時間為85s,單點累加時間約為6ms。掃描結果如圖3所示。
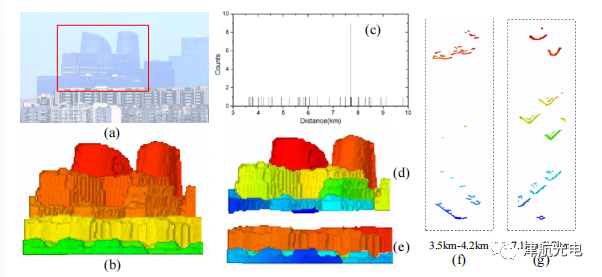
圖3快速掃描三維成像實驗結果
圖中(a)為在實驗室由光學相機拍攝得到的目標照片,紅色線框為激光雷達掃描區域;(b)為掃描全景三維點云圖像;(c)為單個像素在 6ms 累加時間下的光子計數直方圖;(d)為7.1-7.7km 遠景三維點云圖;(e)為3.5-4.2km 近景三維點云圖;(f)和(g)分別為近景和遠景區域頂視圖。從結果中可以看出,整個點云圖分布在3.5-7.7km 范圍,能夠非常精細的展示出雙子塔的表面輪廓(細節處有穿透成像),同時前方建筑群的細節也能夠得到有效的展現。這證明了該系統能夠出色完成日間強烈背景光條件下的快速三維成像。
四、激光雷達系統評價
對于激光雷達系統來說,增加接收光學孔徑和發射激光功率總是可以獲得更遠的探測距離,但這不可避免地會帶來對系統資源的更多需求,給雷達的實際應用帶來困難。這里我們引入經濟學的概念。體積、重量、功耗等系統資源對于一臺激光雷達來說,可以認為是各種“投資”,而“回報”就是最大探測距離。在經濟學上,人們追求更高的投資回報率(Return On Investment,ROI),對于激光雷達系統,同樣也應如此。由此,我們可以通過在單位接收面積、單位發射功率和單位探測時間下的系統最大探測距離平方來得到激光雷達的 ROI 指數,以如下形式給出:

式中Z是激光雷達的最大探測距離,AR是系統有效光學接收面積,P是激光發射的平均功率,T是單像素的探測累積時間(對于N×M面陣探測激光雷達,其單像素探測時間為T/(N×M)),ET是激光單脈沖能量,N為每個像素的脈沖累積次數(對于線性探測激光雷達,N=1)該指數可以認為是激光雷達系統的“投資回報率”。顯然,ROI指數越高,激光雷達的探測效率就越高,或者說激光雷達探測更為“經濟”。上文提出的新型單光子激光雷達的 ROI指數為6.03E14,是一個相當高的分數。
五、結論
對于全天時工作的單光子激光雷達,條件允許時,超導納米線單光子探測器會有較大優勢,除此之外,綜合考慮目前的器件水平以及日光輻射、大氣散射等影響,采用1μm波段作為探測波長和硅基的單光子探測器,會帶來更好的探測性能。
本文采用一種新型的超窄帶光譜濾波技術搭建了一套新型的全天時單光子激光雷達系統。利用該激光雷達在城市復雜大氣環境中完成了24.35km的測距與全天時噪聲水平的測試實驗。隨后完成了 3.2-7.7km的高動態快速三維掃描成像實驗。實驗結果表明該系統能夠在強烈背景光條件下出色的完成探測任務,能夠極大的提升單光子激光雷達的全天時探測能力,為白天工作的激光雷達提供了一種新的實用解決方案。
此外,為了對實際激光雷達系統的性能進行評價,類比經濟學中的“投資回報率”概念,本文提出了一種激光雷達評價模型,即ROI指數,該指數能夠十分直觀的對各種激光雷達系統探測性能進行評價,可作為一種通用的激光雷達性能評價標準。本文提出的新型單光子激光雷達的ROI指數為6.03E14,是一個相當高的分數。
作者簡介
第一作者:劉博,研究員,博士生導師,中國科學院“百人計劃”A 類海外引進人才,四川省“千人計劃”特聘專家,中國科學院空間光電精密測量技術重點實驗室副主任,中國科學院大學光電學院教學委員會委員、主講教授。主要研究方向為激光雷達探測與通信,作為項目負責人承擔并完成多項國家重大科研項目,在激光探測研究領域取得多項顯示度成果。
審核編輯:郭婷
-
探測器
+關注
關注
14文章
2617瀏覽量
72908 -
激光器
+關注
關注
17文章
2483瀏覽量
60251 -
激光雷達
+關注
關注
967文章
3938瀏覽量
189593
原文標題:【特邀報告】全天時單光子激光雷達技術進展與系統評價
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用單光子探測技術設計的數字混沌激光雷達系統

單光子激光雷達:航空遙感技術的革命性突破

激光雷達的維護與故障排查技巧
激光雷達技術的發展趨勢
中科院微電子所在光子集成激光探感技術方面取得進展
光學雷達和激光雷達的區別是什么
基于SPAD單光子相機的LiDAR技術革新

機載單光子激光雷達系統用于實現高分辨率3D成像

基于光子-電子集成回路的相干激光雷達引擎設計
激光雷達的探測技術介紹 機載激光雷達發展歷程

汽車激光雷達:競爭格局和技術演進






 工商網監
工商網監
評論