") 伺服電機和步進電機的區(qū)別
伺服電機和步進電機的區(qū)別
關于步進電機
步進電動機是一種生活中較為常見的控制電機,由特定的驅(qū)動器供給電脈沖。在帶動負載不至于出現(xiàn)超載的情況下,電機的啟停,理想轉(zhuǎn)速V僅僅由控制器輸出到電機的脈沖信號決定,帶動負載不會對其運動產(chǎn)生影響,而電機每收到控制信號后轉(zhuǎn)動的角度,稱為步距角。特殊一點,我們也能夠?qū)⒉竭M電動機看成是一種有著特殊運轉(zhuǎn)方法的同步電動機,直接將收到的電信號轉(zhuǎn)變?yōu)榻俏灰啤?/p>
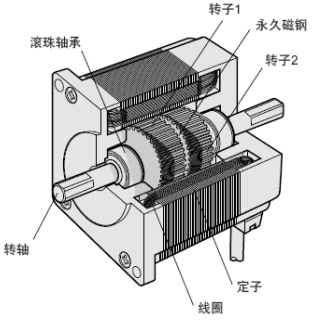
步進電機構造圖
關于伺服電機
伺服電機是指在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機,是一種補助馬達間接變速裝置。伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能快速反應,在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機電時間常數(shù)小、線性度高等特性,可把所收到的電信號轉(zhuǎn)換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類,其主要特點是,當信號電壓為零時無自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
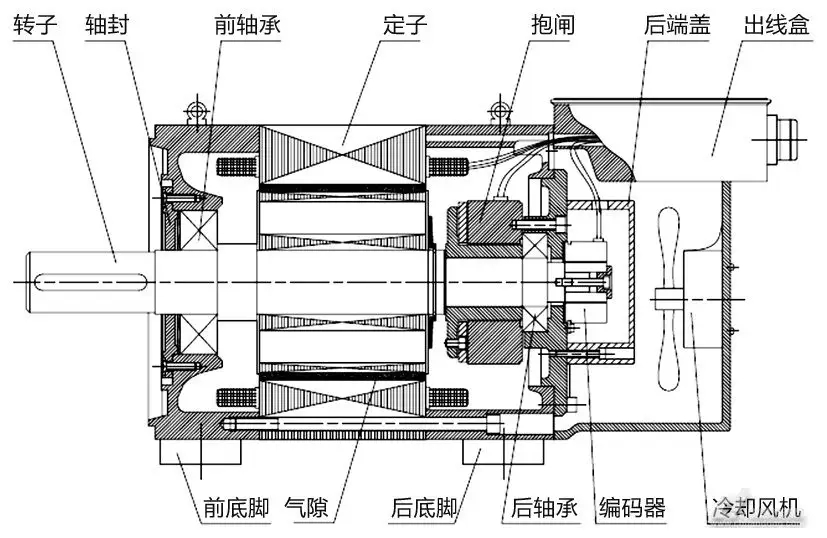
伺服電機構造圖
伺服電機和步進電機的區(qū)別
1、 控制的方式不同
步進電機:通過控制脈沖的個數(shù)控制轉(zhuǎn)動角度的,一個脈沖對應一個步距角。
伺服電機:通過控制脈沖時間的長短控制轉(zhuǎn)動角度。
2、工作流程不同
步進電機:工作流程為步進電機工作一般需要兩個脈沖:信號脈沖和方向脈沖。
伺服電機:其工作流程就是一個電源連接開關,再連接伺服電機。
3、 低頻特性不同
步進電機:在低速時易出現(xiàn)低頻振動現(xiàn)象。
伺服電機:運轉(zhuǎn)非常平穩(wěn),即使在低速時也不會出現(xiàn)振動現(xiàn)象。
4、矩頻特性不同
步進電機:輸出力矩隨轉(zhuǎn)速升高而下降,且在較高轉(zhuǎn)速時會急劇下降,所以其最高工作轉(zhuǎn)速一般在 300~600r/min。
伺服電機:為恒力矩輸出,即在其額定轉(zhuǎn)速(一般為2000或3000 r/min)以內(nèi),輸出額定轉(zhuǎn)矩,在額定轉(zhuǎn)速以上為恒功率輸出。
5、過載能力不同
步進電機:一般不具有過載能力。
伺服電機:具有較強的過載能力。
審核編輯:湯梓紅
-
驅(qū)動器
+關注
關注
52文章
8155瀏覽量
145999 -
步進電機
+關注
關注
150文章
3095瀏覽量
147346 -
伺服電機
+關注
關注
85文章
2028瀏覽量
57699
發(fā)布評論請先 登錄
相關推薦
伺服電機與步進電機的性能比較區(qū)別有哪些?
步進電機伺服控制系統(tǒng)的作用
普通電機、伺服電機和步進電機的區(qū)別在哪里

交流伺服電機與直流伺服電機的區(qū)別
步進電機與伺服電機的主要區(qū)別
步進伺服電機出現(xiàn)失步現(xiàn)象的有哪些原因?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論