 藍牙遙控履帶底盤行駛
藍牙遙控履帶底盤行駛
1. 功能描述
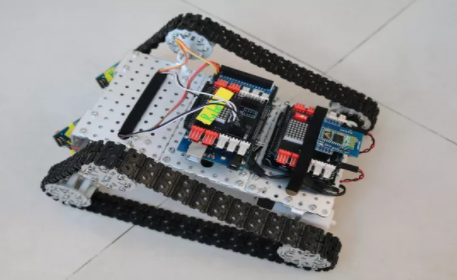
本文提供的示例所實現的功能為:用手機APP遙控斜三角履帶底盤樣機實現移動,包括前進、停止、后退、原地左轉、原地右轉。
在這個示例中,采用了以下硬件,請大家參考:
Basra主控板(兼容Arduino Uno)、Bigfish2.1擴展板、7.4V鋰電池、藍牙串口模塊
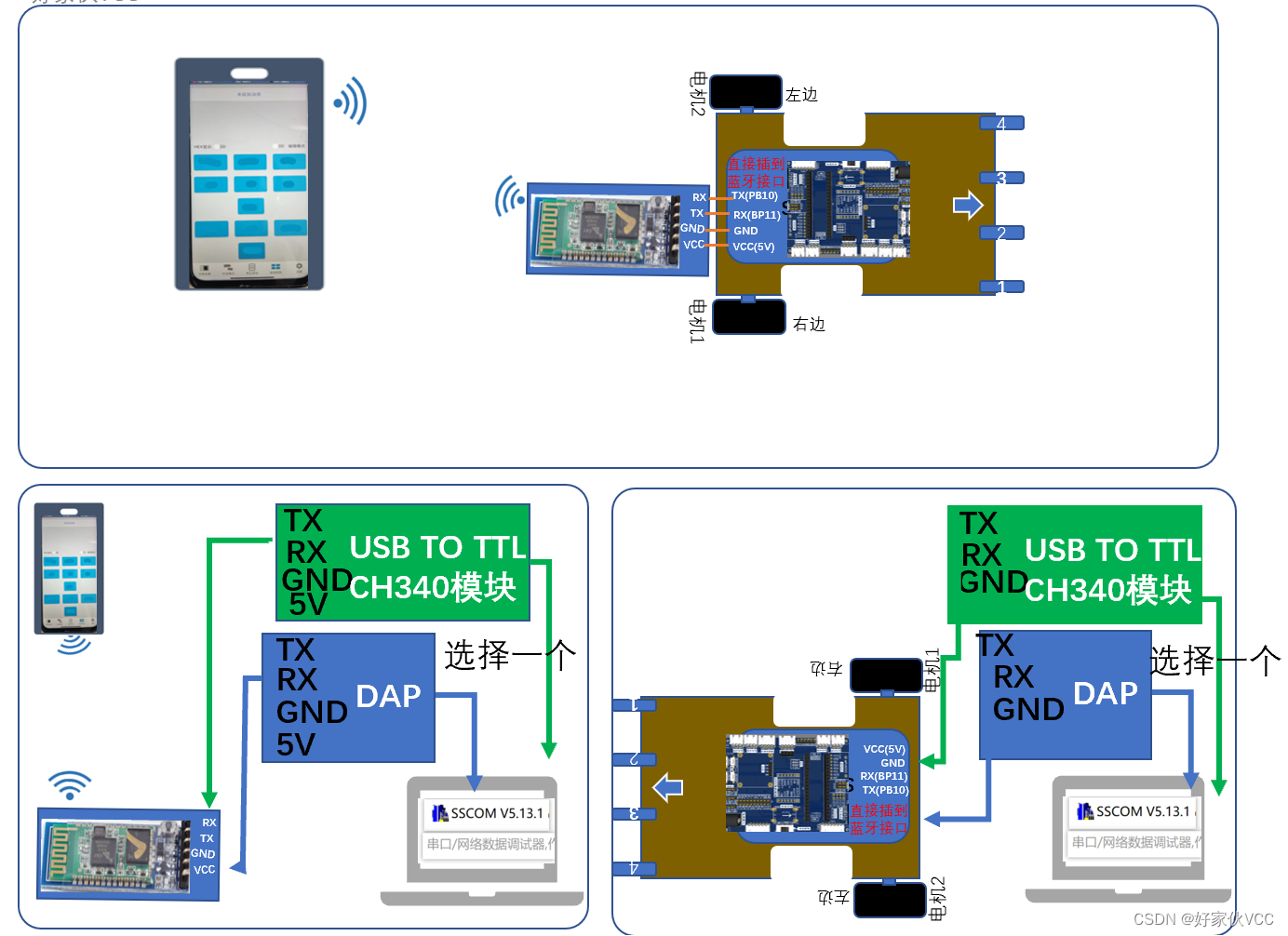
為斜三角履帶底盤樣機安裝藍牙串口模塊,斜三角履帶底盤樣機有兩種擺放方式:

車身右側為安裝了藍牙串口模塊的主控板,左側控制板請忽略
3. 示例程序
編程環境:Arduino 1.8.19
程序通過使用if語句來判斷讀取到的串口的不同字符值來匹配不同的動作,從而實現對機器人的遠程控制。
接收到“1”的時候,執行前進;
接收到“2”的時候,執行后退;
接收到“3”的時候,執行左轉;
接收到“4”的時候,執行右轉;
接收到“5”的時候,執行停止;
手機APP的鍵值按上述規則進行配置,然后單片機接收到不同的信息,對應執行不同的動作。
例程代碼(robot_ble_control.ino)如下:
|
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2022-9-28 https://www.robotway.com/ ------------------------------ 實功能: 從串口(藍牙)接收字符,根據不同字符分別做出前進、后退、停止、原地左轉、原地右轉的動作。 ----------------------------------------------------- 實驗接線: 左輪:D9,D10 右輪:D5,D6。 ------------------------------------------------------------------------------------*/ int _ABVAR_1_Bluetooth_data = 0 ; void Left(); void Stop(); void Right(); void Back(); void Forward(); void setup() { Serial.begin(9600); pinMode( 5 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 9 , OUTPUT); pinMode( 10 , OUTPUT); } void loop() { _ABVAR_1_Bluetooth_data = Serial.parseInt() ; if (( ( _ABVAR_1_Bluetooth_data ) > ( 0 ) )) { if (( ( _ABVAR_1_Bluetooth_data ) == ( 1 ) )) { Forward(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 2 ) )) { Back(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 3 ) )) { Left(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 4 ) )) { Right(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 5 ) )) { Stop(); } } } void Right() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } void Back() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Left() { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Forward() { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } void Stop() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , HIGH ); } |
審核編輯 黃昊宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28212瀏覽量
206568 -
藍牙
+關注
關注
114文章
5771瀏覽量
169836
發布評論請先 登錄
相關推薦
小米汽車發布智能底盤預研技術,展現極致操控性能
技術的發布,不僅展示了小米汽車在智能底盤領域的深厚積累,更預示了其未來在自動駕駛和智能操控方面的巨大潛力。小米全主動懸架能夠根據路況和行駛需求,實時調整懸架狀態,確保車輛行駛的穩定性和舒適性。而小米超級四電機系統則提
線控底盤,自動駕駛時代的基石?
線控底盤(X-by-wire)作為自動駕駛技術的核心支撐技術,正逐步改變著汽車工業的技術框架和市場格局。本文深入探討了線控底盤的定義及其在自動駕駛中的關鍵作用,分析了當前技術的現狀及其面臨的挑戰,并
藍牙語音遙控器方案
在智能家居的時代,科技正在改變我們的生活方式。藍牙語音遙控器,作為智能家居的關鍵組成部分,正在重新定義用戶與設備之間的互動方式。用戶對著藍牙語音遙控器,只要輕說一句話就可以搞定很多復雜


AW30N藍牙語音芯片
杰理藍牙BLE+語音一體化芯片AW30N系列,支持BLE、玩具類、小音箱類產品和通用MCU類應用二次開發。AW30N系列芯片:AW302A、AW305A、AW306A,應用行業:藍牙遙控玩具、語音識別產品、語音
探討底盤的發展歷程及趨勢
自汽車誕生一百余年以來,底盤發展就和汽車發展深度綁定。底盤系統決定了汽車縱向、橫向和垂向六個自由度的動態行為,是汽車能夠跑運行的必要條件。
發表于 04-11 10:13
?560次閱讀
自制一輛遙控悍馬
小時進行設計、3D打印原型、發現問題,然后重復這個過程,但每次我都能學到一些東西。
底盤中最具挑戰性的部分是轉向機構。
我花費了大量時間研究轉向是如何工作的,以及如何讓它應用于我的小型遙控車上。同樣,我經歷
發表于 03-19 16:02
汽車底盤構造之傳動系統詳解
底盤作用是支承、安裝汽車發動機及其各部件、總成,形成汽車的整體造型,并接受發動機的動力,使汽車產生運動,保證正常行駛。底盤由傳動系、行駛系、轉向系和制動系四部分組成。
發表于 03-12 11:32
?724次閱讀

基于國民技術N32WB031的藍牙語音遙控器解決方案
N32WB031系列藍牙芯片是國民技術新一代高性能、超低功耗的藍牙5.1芯片,具有豐富的外設接口,在工業/能源、金融/消費、醫療、家電及汽車等行業領域用途非常廣泛。本文介紹的藍牙語音遙控

無線遙控開關原理 無線遙控開關怎么配對
無線遙控開關原理及配對方法 摘要:隨著科技的發展,無線遙控開關的應用越來越普遍。無線遙控開關通過無線技術,實現了對電器的遙控控制,方便了人們的生活。本文將詳細介紹無線
汽車底盤構造名稱圖解
底盤作用是支承、安裝汽車發動機及其各部件、總成,形成汽車的整體造型,并接受發動機的動力,使汽車產生運動,保證正常行駛。底盤由傳動系、行駛系、轉向系和制動系四部分組成。
發表于 01-17 11:28
?1003次閱讀
低功耗藍牙模塊取代遠紅外技術遙控器廣泛應用于市場
藍牙技術的出現對于遙控器來說似乎是一個質變,那些曾經很常見的紅外遙控器也隨著老電視逐漸退出了市場。雖然萬能遙控器曾經火熱過一段時間,但是隨著低功耗





 工商網監
工商網監
評論