") 用于微型電機(jī)驅(qū)動(dòng)應(yīng)用的快速反應(yīng)光學(xué)編碼器反饋系統(tǒng)
用于微型電機(jī)驅(qū)動(dòng)應(yīng)用的快速反應(yīng)光學(xué)編碼器反饋系統(tǒng)
本文深入探討了工業(yè)自動(dòng)化中電機(jī)控制位置傳感接口設(shè)計(jì)人員面臨的常見問(wèn)題,即能夠在更快、更小尺寸的應(yīng)用中感測(cè)位置。從編碼器捕獲信息以準(zhǔn)確測(cè)量電機(jī)位置對(duì)于自動(dòng)化和機(jī)器人設(shè)備的成功運(yùn)行非常重要。快速、高分辨率、雙通道、同步采樣模數(shù)轉(zhuǎn)換器(ADC)是該系統(tǒng)的重要組成部分。
介紹
電機(jī)旋轉(zhuǎn)信息(如位置、速度和方向)必須準(zhǔn)確,以便在各種新興應(yīng)用中產(chǎn)生精確的驅(qū)動(dòng)器和控制器,例如,在有限的PCB區(qū)域內(nèi)安裝微型元件的拾取和放置機(jī)器中。最近,電機(jī)控制已經(jīng)小型化,在醫(yī)療保健的手術(shù)機(jī)器人以及航空航天和國(guó)防的無(wú)人機(jī)中實(shí)現(xiàn)了新的應(yīng)用。較小的電機(jī)控制器還支持工業(yè)和商業(yè)安裝中的新應(yīng)用。設(shè)計(jì)人員面臨的挑戰(zhàn)是滿足高速應(yīng)用中位置反饋傳感器的高精度要求,同時(shí)將所有組件注入有限的PCB空間,以安裝在微型外殼(如機(jī)械臂)中。
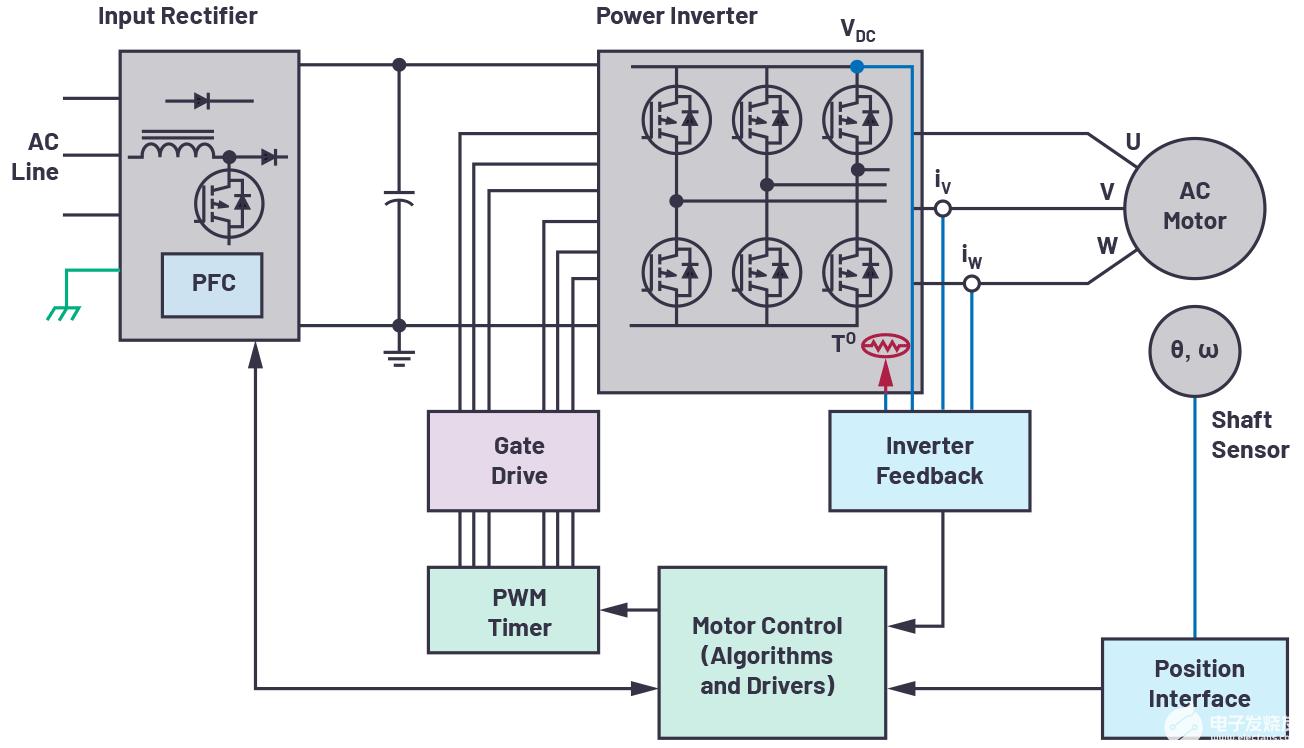
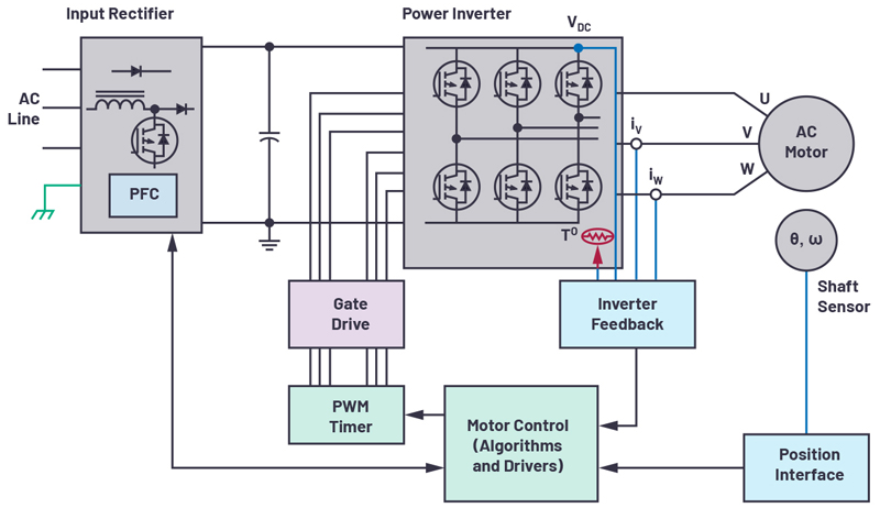
圖1.閉環(huán)電機(jī)控制反饋系統(tǒng)。
電機(jī)控制
如圖1所示,電機(jī)控制回路主要由電機(jī)、控制器和位置反饋接口組成。電機(jī)轉(zhuǎn)動(dòng)旋轉(zhuǎn)軸,使機(jī)器的臂相應(yīng)地移動(dòng)。電機(jī)控制器告訴電機(jī)何時(shí)施加力、停止或繼續(xù)旋轉(zhuǎn)。回路中的位置接口向控制器提供轉(zhuǎn)速和位置信息。這些數(shù)據(jù)對(duì)于用于組裝微型表面貼裝 PCB 的拾取和放置機(jī)器的正常運(yùn)行至關(guān)重要。所有這些應(yīng)用都需要有關(guān)旋轉(zhuǎn)物體的精確位置測(cè)量信息。
位置傳感器分辨率必須非常高,足以準(zhǔn)確檢測(cè)電機(jī)軸位置,正確拾取微小組件,并將其精確地放置在電路板上。此外,更高的電機(jī)轉(zhuǎn)速會(huì)導(dǎo)致更高的環(huán)路帶寬和更低的延遲要求。
位置反饋系統(tǒng)
在低端應(yīng)用中,增量式傳感器和比較器可能足以進(jìn)行位置檢測(cè),而高端應(yīng)用則需要更復(fù)雜的信號(hào)鏈。這些反饋系統(tǒng)包括位置傳感器,然后是模擬前端信號(hào)調(diào)理、ADC及其驅(qū)動(dòng)器,然后數(shù)據(jù)進(jìn)入數(shù)字域。最精確的位置傳感器之一是光學(xué)編碼器。光學(xué)編碼器由LED光源、附在電機(jī)軸上的標(biāo)記盤和光電探測(cè)器組成。圓盤具有不透明和透明區(qū)域的遮罩圖案,可遮擋光線或允許光線通過(guò)。光電探測(cè)器感測(cè)產(chǎn)生的光,并將開/關(guān)光信號(hào)轉(zhuǎn)換為電信號(hào)。
當(dāng)圓盤轉(zhuǎn)動(dòng)時(shí),光電探測(cè)器與圓盤的圖案相結(jié)合,產(chǎn)生mV或μV級(jí)的小正弦和余弦信號(hào)。該系統(tǒng)是絕對(duì)位置光學(xué)編碼器的典型系統(tǒng)。這些信號(hào)被饋送到模擬信號(hào)調(diào)理電路,該電路通常由分立放大器或模擬PGA組成,以獲得高達(dá)1 V p-p范圍的信號(hào),通常適合ADC輸入電壓范圍以獲得最大動(dòng)態(tài)范圍。然后,每個(gè)放大的正弦和余弦信號(hào)由同步采樣ADC的驅(qū)動(dòng)放大器采集。
ADC必須在其通道上同時(shí)采樣,以便在完全相同的時(shí)間點(diǎn)獲取正弦和余弦數(shù)據(jù)點(diǎn),因?yàn)樵摻M合可提供軸位置信息。ADC轉(zhuǎn)換結(jié)果被傳遞到ASIC或微控制器。電機(jī)控制器在每個(gè)PWM周期查詢編碼器位置,并根據(jù)收到的指令使用此數(shù)據(jù)驅(qū)動(dòng)電機(jī)。過(guò)去,系統(tǒng)設(shè)計(jì)人員必須犧牲ADC速度或通道數(shù),以適應(yīng)限制性電路板尺寸。
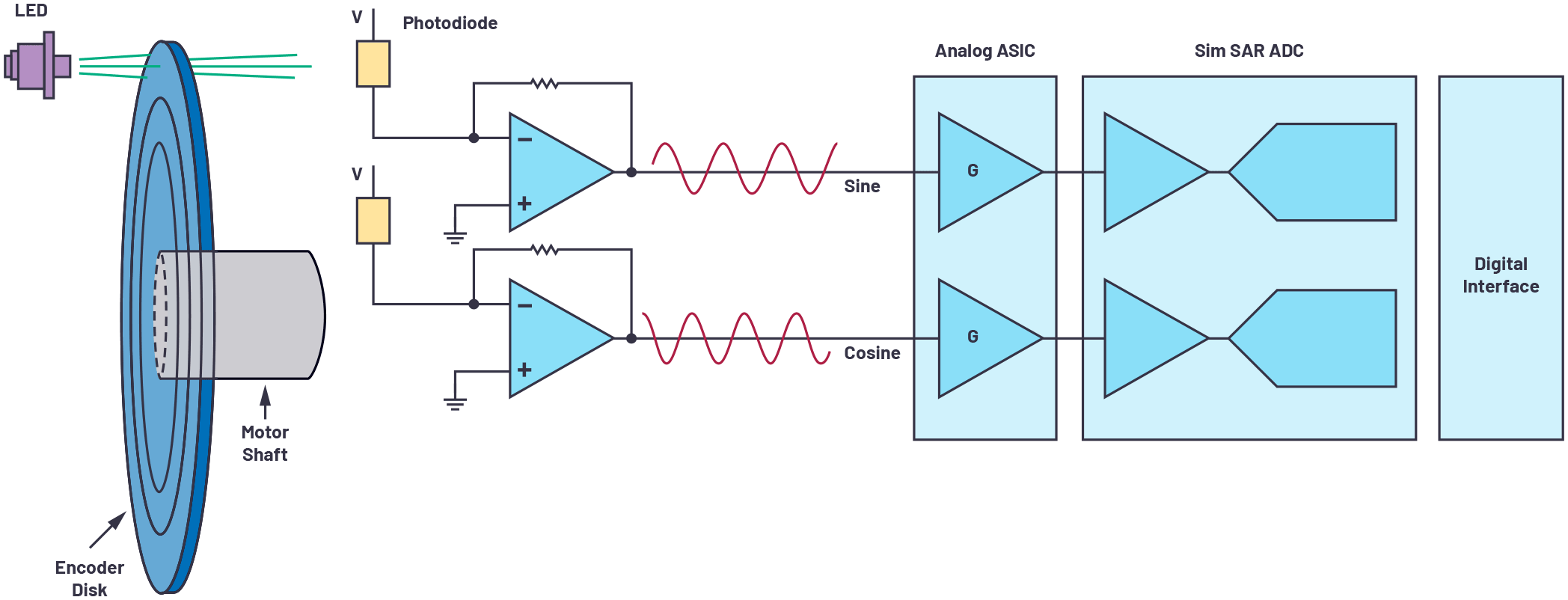
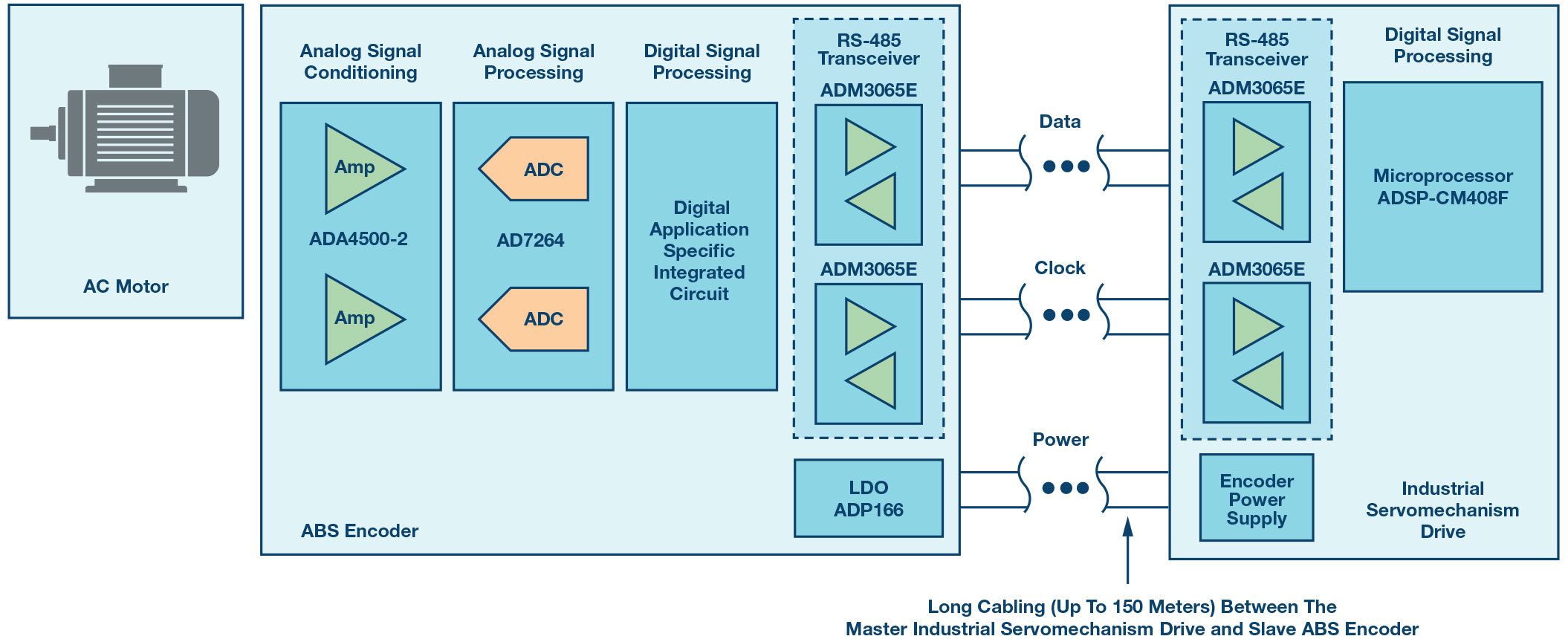
圖2.位置反饋系統(tǒng)。
優(yōu)化位置反饋
不斷發(fā)展的技術(shù)需求催生了需要高精度位置檢測(cè)的電機(jī)控制應(yīng)用的創(chuàng)新。光學(xué)編碼器的分辨率可以基于光盤中精細(xì)光刻刻的插槽數(shù)量,通常為數(shù)百或數(shù)千。將這些正弦和余弦信號(hào)插值到高速、高性能ADC中,將使我們能夠創(chuàng)建更高分辨率的編碼器,而無(wú)需對(duì)編碼器盤進(jìn)行系統(tǒng)更改。例如,當(dāng)編碼器正弦和余弦信號(hào)以較慢的速率采樣時(shí),捕獲的信號(hào)值較少,如圖3所示;這也限制了倉(cāng)位上限的準(zhǔn)確性。在圖3中,當(dāng)ADC以更快的速率采樣時(shí),捕獲更詳細(xì)的信號(hào)值,并確定更高精度的位置。ADC的高速采樣速率允許過(guò)采樣,進(jìn)一步改善噪聲性能,消除一些數(shù)字后處理需求。同時(shí),它降低了ADC的輸出數(shù)據(jù)速率;也就是說(shuō),允許較慢的串行頻率信號(hào),從而簡(jiǎn)化數(shù)字接口。電機(jī)位置反饋系統(tǒng)安裝在電機(jī)組件中,在某些應(yīng)用中可能非常小。因此,尺寸對(duì)于適應(yīng)編碼器模塊的有限PCB區(qū)域至關(guān)重要。在單個(gè)微型封裝中出現(xiàn)多個(gè)通道組件最適合節(jié)省空間。
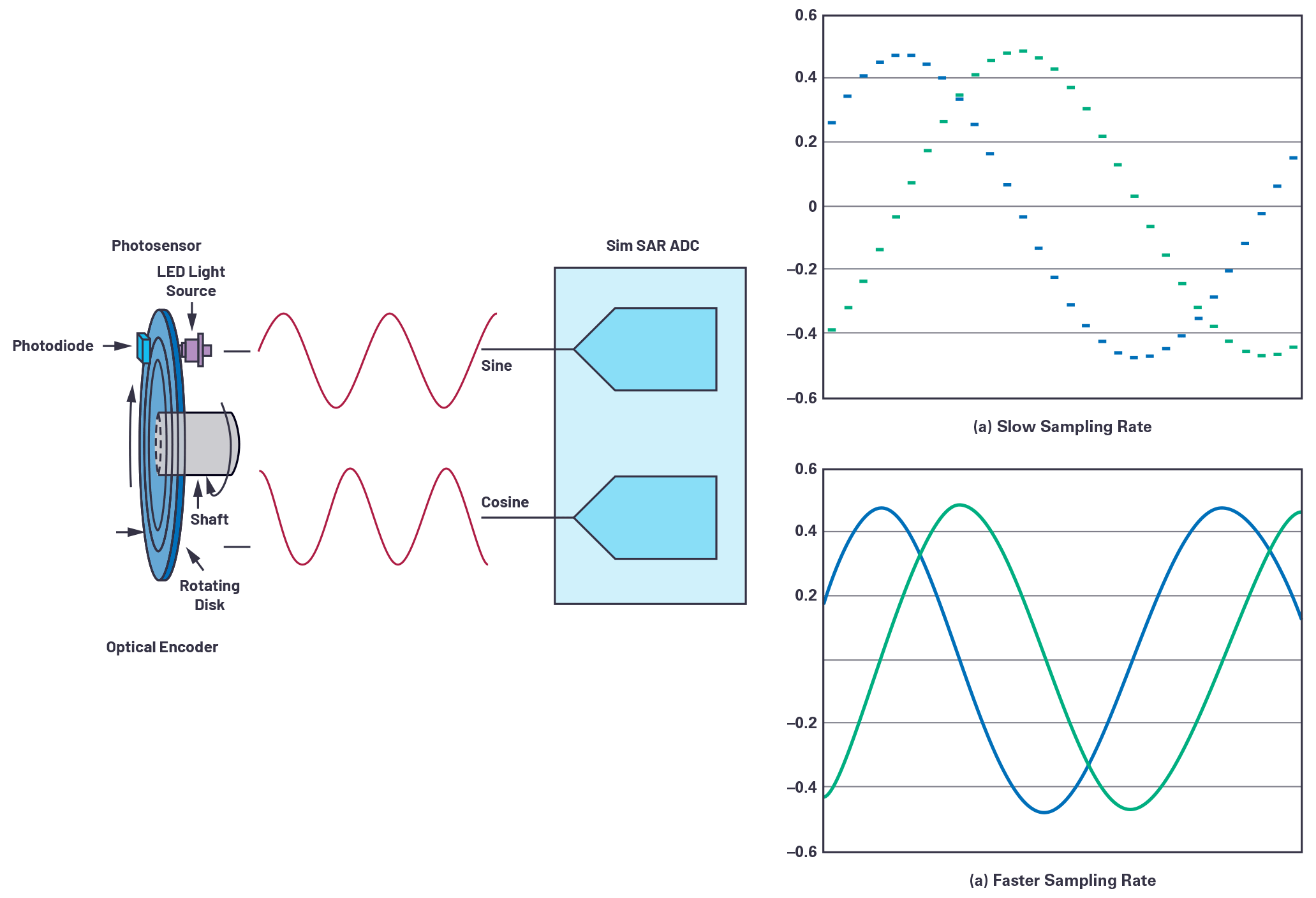
圖3.采樣率。
光學(xué)編碼器位置反饋設(shè)計(jì)示例
光學(xué)編碼器位置反饋系統(tǒng)的優(yōu)化解決方案示例如圖4所示。該電路可以很容易地連接到絕對(duì)型光學(xué)編碼器,其中來(lái)自編碼器的差分正弦和余弦信號(hào)可以很容易地被電路捕獲。ADA4940-2前端放大器是一款雙通道、低噪聲、全差分放大器,用于驅(qū)動(dòng)雙通道、16位、全差分、4 MSPS同步采樣SAR ADC,采用3 mm×3 mm LFCSP小型封裝。片內(nèi)2.5 V基準(zhǔn)電壓源可滿足該電路的最低元件要求。五世抄送和 V駕駛的 ADC 和放大器驅(qū)動(dòng)器的電源軌可由一個(gè) LDO 穩(wěn)壓器(例如 LT3023 和 LT3032)供電。當(dāng)這些參考設(shè)計(jì)與1024槽光學(xué)編碼器接口時(shí),該編碼器在編碼器盤的一圈內(nèi)產(chǎn)生1024個(gè)正弦和余弦周期,16位AD7380對(duì)每個(gè)編碼器槽的采樣頻率為216代碼,總體上將編碼器分辨率提高到 26 位。4 MSPS吞吐速率可確保捕獲詳細(xì)的正弦和余弦周期,并確保編碼器位置是最新的。高吞吐速率可實(shí)現(xiàn)片上過(guò)采樣,從而減少數(shù)字ASIC或微控制器向電機(jī)饋送精確編碼器位置的時(shí)間損失。AD7380片內(nèi)過(guò)采樣的另一個(gè)優(yōu)點(diǎn)是,它允許額外的2位分辨率,可輕松與片內(nèi)分辨率提升功能一起使用。分辨率提升可以進(jìn)一步提高精度,最高可達(dá)28位。應(yīng)用筆記AN-2003詳細(xì)介紹了AD7380的過(guò)采樣和分辨率提升特性。
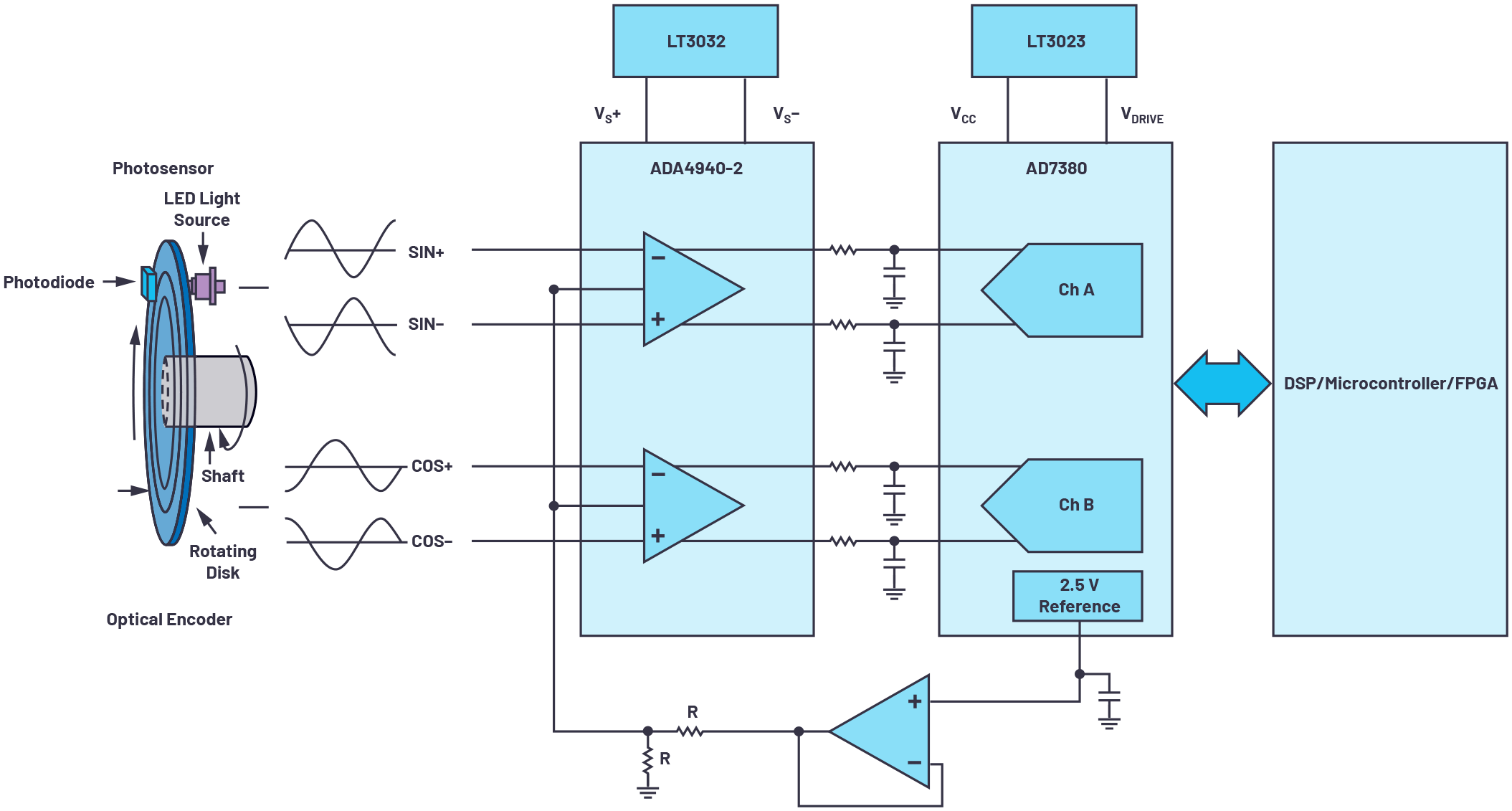
圖4.優(yōu)化反饋系統(tǒng)設(shè)計(jì)。
結(jié)論
電機(jī)控制系統(tǒng)對(duì)更高精度、更高速度和小型化的需求正在增加。光學(xué)編碼器用作電機(jī)位置傳感設(shè)備。為此,光學(xué)編碼器信號(hào)鏈在測(cè)量電機(jī)位置時(shí)必須具有高精度。高速、高吞吐量ADC可準(zhǔn)確捕獲信息并將電機(jī)位置數(shù)據(jù)饋送到控制器。AD7380的速度、密度和性能可滿足行業(yè)需求,同時(shí)在位置反饋系統(tǒng)中實(shí)現(xiàn)更高水平的精度和優(yōu)化。
審核編輯:郭婷
-
pcb
+關(guān)注
關(guān)注
4317文章
23002瀏覽量
396234 -
控制器
+關(guān)注
關(guān)注
112文章
16197瀏覽量
177396 -
編碼器
+關(guān)注
關(guān)注
45文章
3592瀏覽量
134145 -
電機(jī)驅(qū)動(dòng)
+關(guān)注
關(guān)注
60文章
1203瀏覽量
86613
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
適用于微型電機(jī)驅(qū)動(dòng)應(yīng)用的快速反應(yīng)、光學(xué)編碼器反饋系統(tǒng)
伺服電機(jī)與編碼器小知識(shí)
請(qǐng)問(wèn)步進(jìn)電機(jī)是否可以裝編碼器
磁性編碼器技術(shù)在電機(jī)的旋轉(zhuǎn)位置反饋中有什么應(yīng)用?精選資料推薦
Avago光學(xué)編碼器AEDB-9340在伺服電機(jī)系統(tǒng)中的應(yīng)用

電機(jī)小知識(shí):伺服電機(jī)與編碼器
光學(xué)編碼器位置反饋系統(tǒng)優(yōu)化設(shè)計(jì)方案
光學(xué)編碼器位置反饋系統(tǒng)優(yōu)化設(shè)計(jì)
什么是電機(jī)編碼器?電機(jī)編碼器配置種類
增強(qiáng)電機(jī)控制編碼器應(yīng)用的通信可靠性和性能
磁性編碼器和光電編碼器的比較
伺服控制器編碼器反饋數(shù)值為負(fù)數(shù)怎么回事
伺服電機(jī)編碼器起什么作用
如何判斷伺服電機(jī)編碼器故障?
具有Endat 2.2絕對(duì)編碼器反饋、采用EtherCAT連接的電機(jī)驅(qū)動(dòng)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論