") 機(jī)器視覺發(fā)展趨勢
機(jī)器視覺發(fā)展趨勢
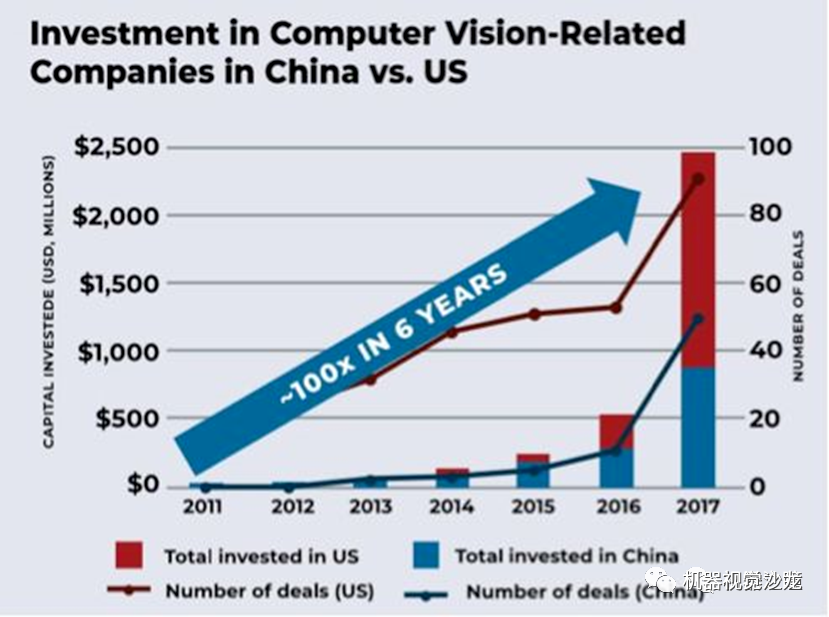
早在2011年嵌入式視覺聯(lián)盟(EVA)成立時,其創(chuàng)始公司就認(rèn)為,在廣泛的市場范圍內(nèi),在實用計算機(jī)視覺技術(shù)和解決方案領(lǐng)域的投資、創(chuàng)新和部署,將很快出現(xiàn)前所未有的增長。在不到十年后,這一預(yù)測就真正實現(xiàn)了。在過去的六年中,美國和中國在計算機(jī)視覺公司領(lǐng)域的投資都在加速,過去六年的投資額增長了100倍,并且增長速度沒有任何放緩的跡象,如下圖所示。
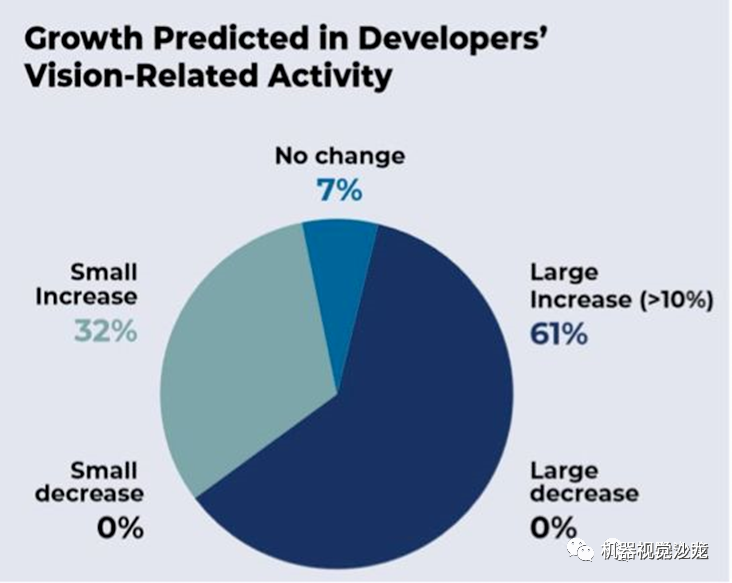
這些投資正在刺激這些公司及其合作伙伴和客戶加速在視覺領(lǐng)域的研究、開發(fā)和部署活動。EVA會定期對視覺開發(fā)者社區(qū)就各種主題開展調(diào)查,最新調(diào)查結(jié)果表明,93%的被調(diào)查組織表示,未來一年中在視覺領(lǐng)域的投入會增加(其中61%表示會大幅增加),如下圖所示。
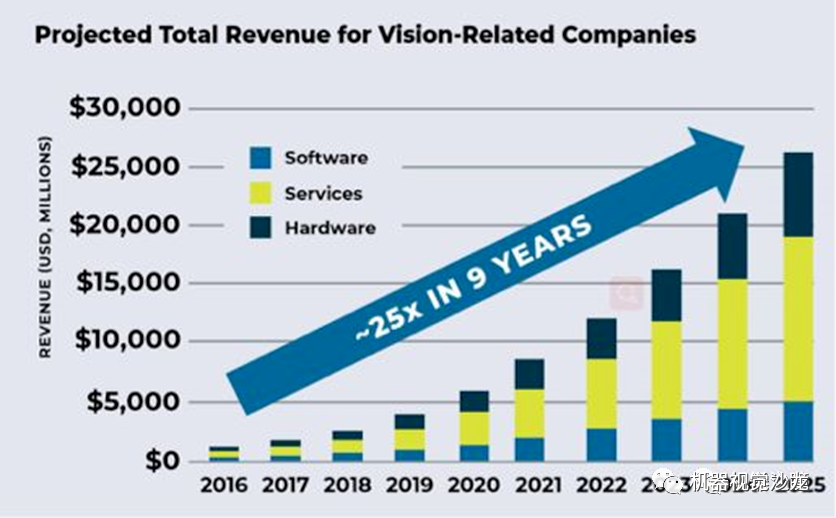
預(yù)計這些增加的活動將轉(zhuǎn)化為收入的增加。例如,Tractica最近發(fā)布的一份市場研究報告預(yù)測,從現(xiàn)在到2025年,計算機(jī)視覺市場(包括硬件、軟件和服務(wù))的收入將增加25倍,到2025年將超過260億美元,如下圖所示。
其中,有四大關(guān)鍵趨勢正在驅(qū)動這些增長。
1.深度學(xué)習(xí)
傳統(tǒng)上,計算機(jī)視覺應(yīng)用依賴于專用的算法,這些算法經(jīng)過精心設(shè)計以識別特定的特征(如邊緣、角落、物體)。然而最近,卷積神經(jīng)網(wǎng)絡(luò)(CNN)和其他深度學(xué)習(xí)方法已經(jīng)在各種圖像理解任務(wù)上,表現(xiàn)得優(yōu)于傳統(tǒng)算法。與傳統(tǒng)算法相比,深度學(xué)習(xí)方法是通過實例訓(xùn)練的通用學(xué)習(xí)算法,來識別特定的特征,包括物體類型和位置。深度神經(jīng)網(wǎng)絡(luò)(DNN)已經(jīng)改變了計算機(jī)視覺領(lǐng)域,其在識別物體、在一幀圖像內(nèi)定位物體以及確定哪個像素屬于哪個物體等功能上,都提供了優(yōu)越的結(jié)果。即使是像光流和立體匹配這樣的已經(jīng)用傳統(tǒng)技術(shù)能很好地解決的問題,現(xiàn)在也可以用深度學(xué)習(xí)技術(shù)找到更好的解決方案。
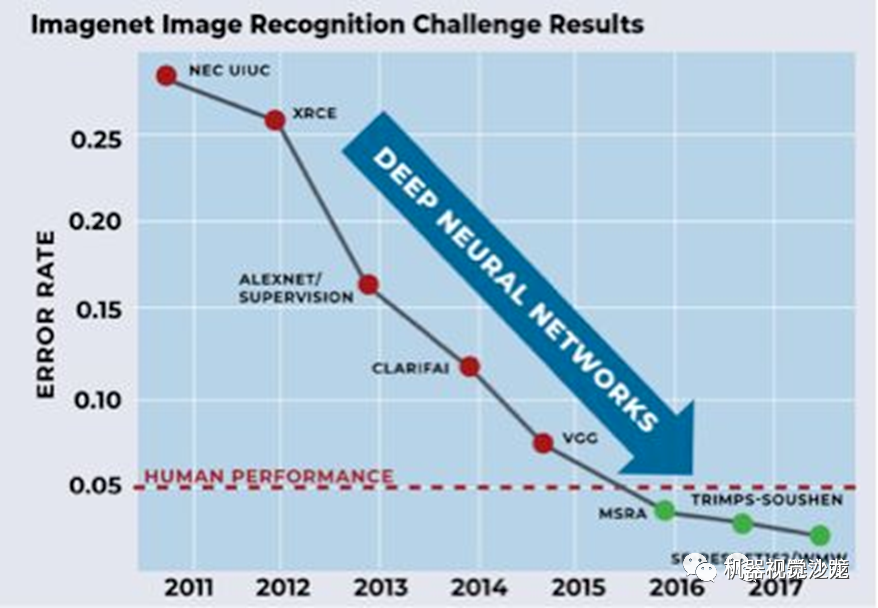
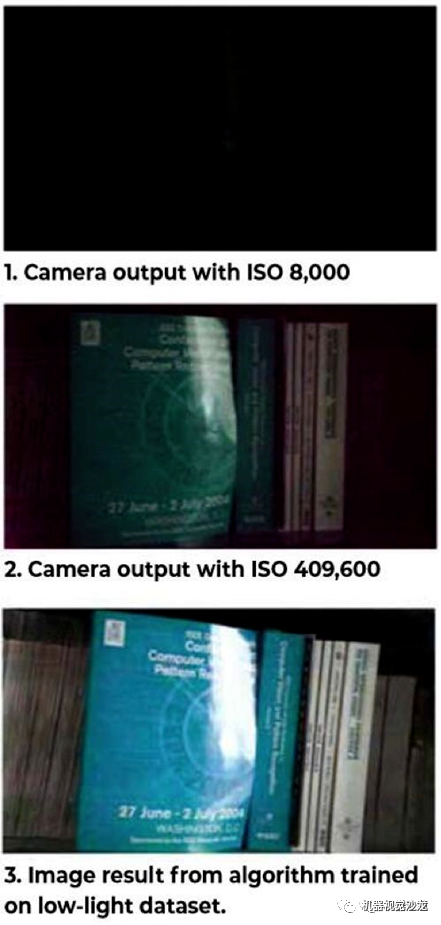
此外,基于深度學(xué)習(xí)的視覺處理方法,在解決許多問題上都優(yōu)于傳統(tǒng)的計算機(jī)視覺算法。Image Net圖像識別挑戰(zhàn)賽獲獎?wù)叩慕Y(jié)果表明,從幾年前開始,在相同的任務(wù)和相同的數(shù)據(jù)集中,深度學(xué)習(xí)在識別物體方面的準(zhǔn)確性開始超過典型的人類功能,如下圖所示。深度神經(jīng)網(wǎng)絡(luò)也被訓(xùn)練、以填補照片中缺失的補丁,與能夠熟練處理圖片的操作員的技能相匹配,同時能夠比人更快地提供處理結(jié)果。而且,訓(xùn)練有素的神經(jīng)網(wǎng)絡(luò)甚至開始產(chǎn)生遠(yuǎn)超越技術(shù)嫻熟的人類所能做出的成就,例如從非常差的曝光照片中產(chǎn)生可接受的圖像,如下圖所示。
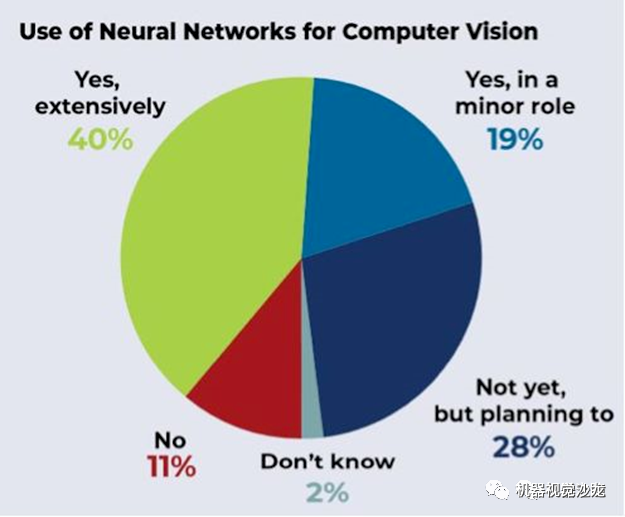
因此,不出所料,計算機(jī)視覺開發(fā)人員正越來越多地將深度學(xué)習(xí)技術(shù)添加到他們的工具箱中,如下圖所示。EVA最近的調(diào)查結(jié)果顯示,59%的視覺系統(tǒng)和解決方案開發(fā)者已經(jīng)在使用DNN,比兩年前的34%大幅增加。28%的人計劃在不久的將來使用DNN用于視覺智能。總體來看,87%的開發(fā)者已經(jīng)使用或計劃使用神經(jīng)網(wǎng)絡(luò)來執(zhí)行計算機(jī)視覺功能。
2.3D傳感
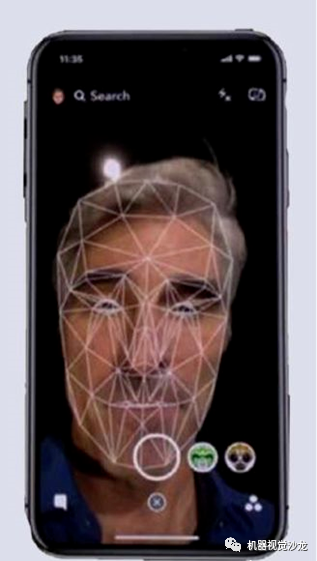
2D圖像傳感器能夠在許多嵌入式視覺系統(tǒng)設(shè)計中,實現(xiàn)巨大的視覺能力。然而,它們無法辨別物體與傳感器之間的距離,這將導(dǎo)致某些視覺功能的實現(xiàn)非常困難或是無法實現(xiàn)。例如,手勢接口實現(xiàn)。識別運動的能力,包括上下、左右和前后,能夠大大擴(kuò)展系統(tǒng)能夠解讀的手勢的多樣性、豐富性和精確性。或者是人臉識別情況,如下圖所示。深度傳感在“確定被識別的物體是真實的人臉而非人臉的照片”方面,也很有價值。
ADAS(汽車高級駕駛輔助系統(tǒng))和其他受益于3D傳感器的半自動和全自動設(shè)備應(yīng)用也非常豐富。例如,你可以很容易地想象,在公路上,你不僅能夠確定另一輛車或物體在你的前方或后方,而且還能準(zhǔn)確地辨別它與你之間的距離。準(zhǔn)確地確定車輛與限速標(biāo)志之間的距離,對于確定多久必須把車速降下來、進(jìn)而避免罰單同樣非常有用。
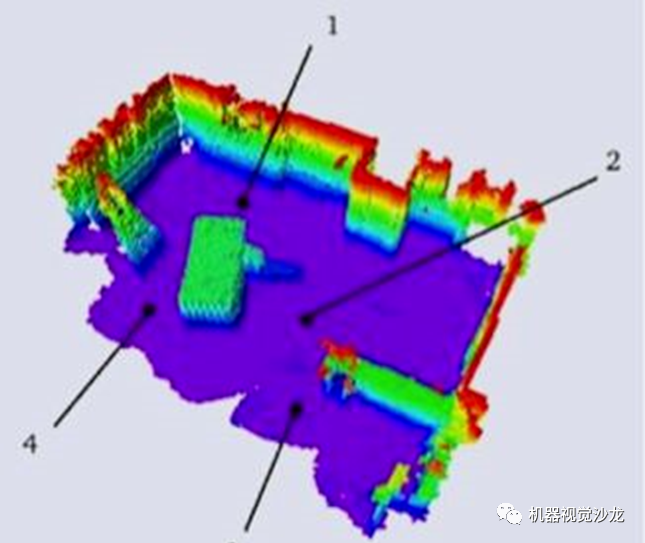
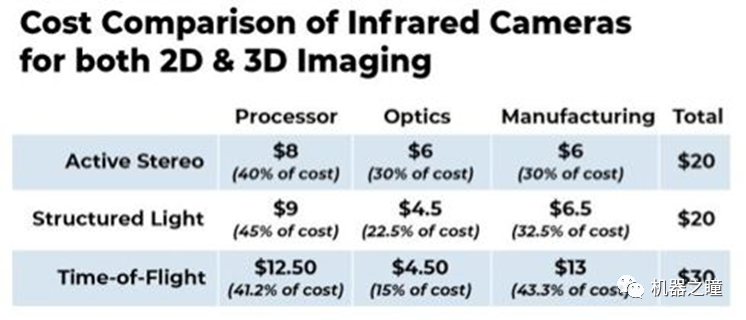
同樣,用于3D打印的3D物體掃描也是一個重要的應(yīng)用案例。幸運的是,最近將3D光學(xué)傳感器引入手機(jī)和汽車等大批量生產(chǎn)應(yīng)用中,不但加速了創(chuàng)新,而且使尺寸、成本和3D傳感的復(fù)雜性都有所降低,如下圖所示。3D相機(jī)模塊通常包括某種形式的紅外照明,其同樣得益于最近顯著的成本降低趨勢,它在低光環(huán)境中以及在監(jiān)控戴太陽鏡的車輛駕駛員的注意力方面,非常有用。

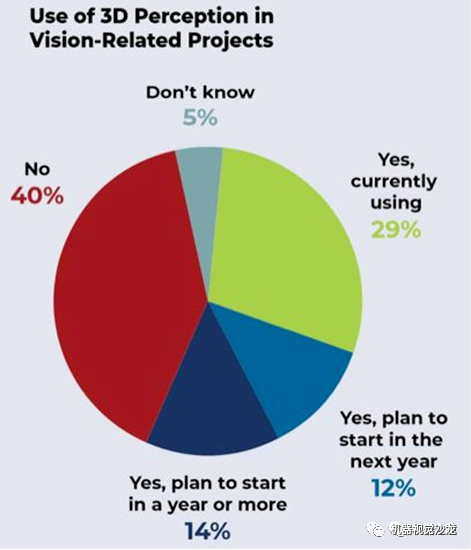
在微軟Kinect游戲機(jī)外設(shè)首次亮相8年后,現(xiàn)在3D相機(jī)模塊已經(jīng)準(zhǔn)備好部署在成本和功率敏感的應(yīng)用中。計算機(jī)視覺開發(fā)者正在對3D傳感采取積極行動和積極預(yù)測。EVA最近的調(diào)查顯示,近30%的開發(fā)者已經(jīng)在使用3D傳感,26%的開發(fā)者計劃近期內(nèi)在其項目中采用3D傳感功能,如下圖所示。
3.處理器進(jìn)步
推動強(qiáng)大而廣泛的視覺感知可部署性的最重要因素,是更好的處理器。“更好”是指更高的性能、更低的成本、更低的功耗,以及其他關(guān)鍵因素的改進(jìn)。視覺算法對計算性能要求很高,各種嵌入式系統(tǒng)通常需要滿足低成本和低功耗的要求。在數(shù)字無線通信和以壓縮為中心的消費視頻設(shè)備等其他應(yīng)用領(lǐng)域,芯片設(shè)計人員通過使用專用協(xié)處理器和加速器,獲得高性能、低成本和低功耗的極具挑戰(zhàn)性的組合,從而實現(xiàn)應(yīng)用中最苛刻的處理任務(wù)。然而,這些協(xié)處理器和加速器通常不能由芯片用戶編程。
在很多標(biāo)準(zhǔn)應(yīng)用中,這種權(quán)衡通常是可以接受的,因為在這些應(yīng)用中,不同設(shè)計者使用的算法具有很強(qiáng)的通用性。然而,在視覺應(yīng)用中,并沒有標(biāo)準(zhǔn)來約束算法的選擇。此外,視覺算法發(fā)展迅速,并且變化頻繁。 因此,實現(xiàn)高性能、低成本、低功耗和可編程性的結(jié)合,是一項非常具有挑戰(zhàn)性的工作,通常需要在異構(gòu)計算體系結(jié)構(gòu)中通過組合多種類型的處理器(CPU、GPU、FPGA、DSP等)來實現(xiàn)。
基于機(jī)器學(xué)習(xí)的視覺處理,無論對于預(yù)先培訓(xùn)還是隨后的推理任務(wù)而言,從計算和存儲需求來看,都是資源密集型的工作。幸運的是,視覺處理器正在以驚人的速度發(fā)展,一方面開發(fā)速度非常快,另一方面來自數(shù)量龐大且仍在增長的技術(shù)供應(yīng)商方面的競爭壓力。例如,現(xiàn)在有50多家公司同時在為深度學(xué)習(xí)推理和/或訓(xùn)練開發(fā)處理器。在過去的幾年中,深度學(xué)習(xí)加速的處理能力,已經(jīng)有了兩個數(shù)量級的提升,這些性能的提升與多方技術(shù)進(jìn)步相結(jié)合,將使處理器的處理能力呈指數(shù)級增長。
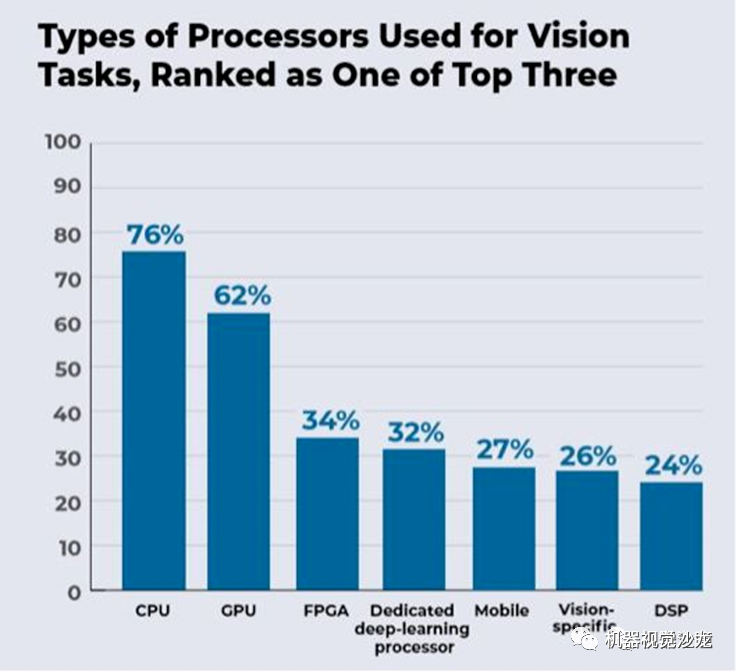
EVA最近在開發(fā)者調(diào)查中收集的數(shù)據(jù)顯示,深度學(xué)習(xí)專用處理器的采用顯著增加。近1/3的受訪者表示現(xiàn)在正在使用深度學(xué)習(xí)專用處理器,而兩年前這一比例只有19%(由于調(diào)查對象要求標(biāo)記所有他們的項目使用的處理器,所以總數(shù)超過100%),如下圖所示。這種趨勢尤其令人震驚,因為在幾年前,深度學(xué)習(xí)專用處理器還根本不存在。同樣需要注意的是,其他處理架構(gòu)通常用于各種視覺任務(wù)。
4.軟硬件普及
“普及化”意味著開發(fā)有效的計算機(jī)視覺系統(tǒng)和應(yīng)用、以及大規(guī)模部署這些解決方案,正在快速變得越來越容易,原因如下:
1.深度學(xué)習(xí)使非專家能夠使用樣本圖像數(shù)據(jù)(與手工設(shè)計的代碼相比)更容易地創(chuàng)建功能性視覺系統(tǒng);
2.有了更高性能、更低成本的處理器和有效的開發(fā)工具;
3.作為邊緣處理的輔助或替代,云計算越來越普遍。
前兩點已經(jīng)討論過,但第3點值得注意。云計算作為基于邊緣視覺處理方法的輔助(如果不是替代的話),正變得越來越普遍。
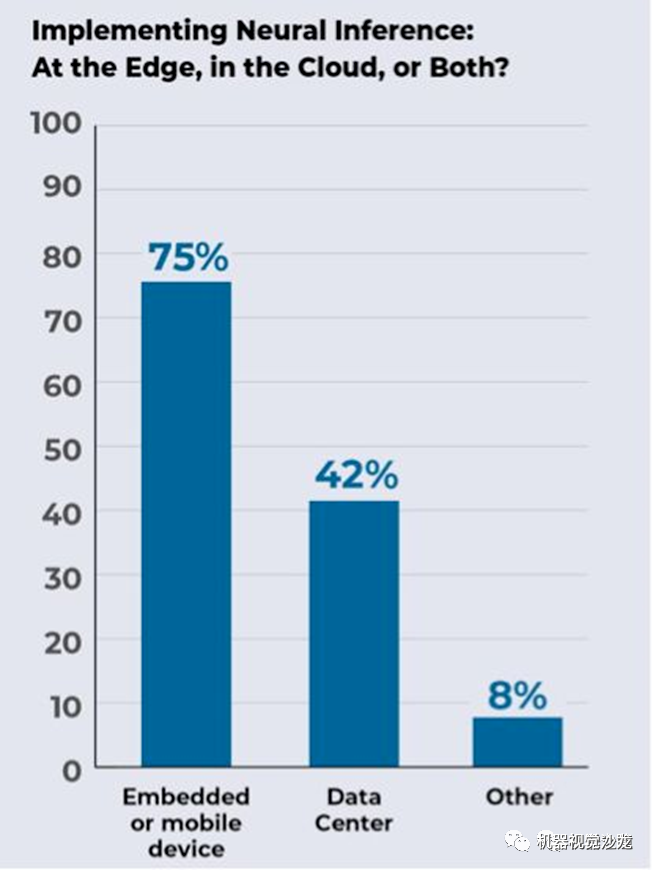
“云vs邊緣計算vs兩者混合”的拓?fù)錄Q策通常并不簡單,“正確”的答案因應(yīng)用和公司的不同而不同,甚至同一公司內(nèi)的不同項目之間也不同,如下圖所示。
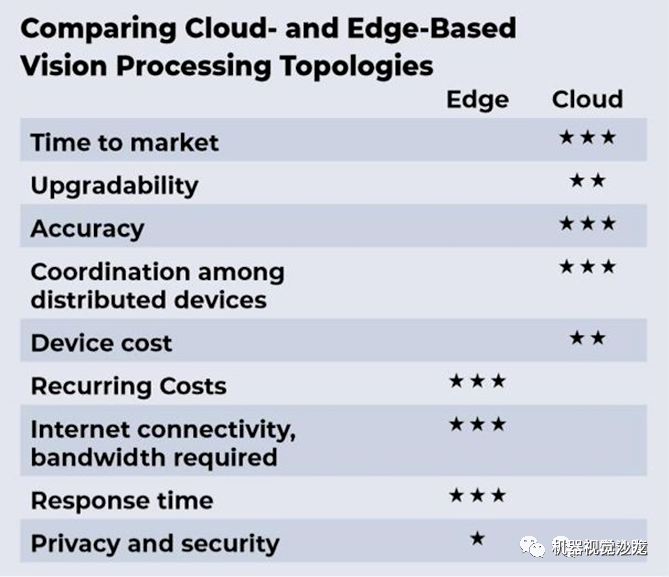
云計算的有利因素包括:
1.上市時間,云計算的軟件開發(fā)通常比嵌入式平臺的軟件開發(fā)更快捷、更容易;
2.可升級性,在限制范圍內(nèi),用戶可以輕松升級到更高性能的處理器、更大的內(nèi)存容量、更多的硬盤存儲、更新的操作系統(tǒng)和中間件版本等。當(dāng)然用戶也不能在云中升級所有東西,例如不能升級圖像傳感器;
3.準(zhǔn)確性,用戶可以在云中獲得巨大的計算能力,因此可以運行更大的神經(jīng)網(wǎng)絡(luò),也就是運行更復(fù)雜的算法,包括能夠根據(jù)需要利用突發(fā)的額外處理能力;
4.分布式設(shè)備之間的協(xié)作,如果你正在跟蹤城市中行駛的車輛,那么就有必要在一個地理區(qū)域內(nèi)收集信息。雖然云并不是實現(xiàn)這一點的唯一途徑,但它能很方便地將來自許多分散邊緣節(jié)點的信息結(jié)合起來;
5.設(shè)備成本,更低的物料清單成本、更小的電池等。當(dāng)然以邊緣為中心的方法有其自身優(yōu)勢;
6.無需經(jīng)常性成本,不必為每次使用云計算處理、內(nèi)存和存儲資源支付費用;
7.網(wǎng)絡(luò)連接性,通常根本不需要,或是不會經(jīng)常需要;
8.帶寬和延遲,當(dāng)需要網(wǎng)絡(luò)連接時,帶寬和延遲要求會降低,因為在進(jìn)入云傳輸之前,很大一部分?jǐn)?shù)據(jù)處理已經(jīng)在邊緣設(shè)備上完成了;
9.隱私和安全,原始數(shù)據(jù)在邊緣設(shè)備上處理,通常會立即丟棄。唯一能進(jìn)入云端的信息是元數(shù)據(jù),而且通常是匿名的。
EVA最新的開發(fā)者調(diào)查結(jié)果不出所料地顯示,大多數(shù)受訪者至少在邊緣設(shè)備上做了一些神經(jīng)網(wǎng)絡(luò)推理(如下圖所示,由于調(diào)查對象要求標(biāo)記所有他們的項目使用的處理器,所以總數(shù)超過100%)。然而,近一半的受訪者也在云中進(jìn)行部分或全部推理。
審核編輯 :李倩
-
嵌入式
+關(guān)注
關(guān)注
5070文章
19024瀏覽量
303477 -
機(jī)器視覺
+關(guān)注
關(guān)注
161文章
4347瀏覽量
120126 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8381瀏覽量
132431 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1205瀏覽量
24648
原文標(biāo)題:機(jī)器視覺發(fā)展趨勢
文章出處:【微信號:機(jī)器視覺沙龍,微信公眾號:機(jī)器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
未來物流發(fā)展趨勢與TMS的關(guān)系
機(jī)器人技術(shù)的發(fā)展趨勢
邊緣計算的未來發(fā)展趨勢
智能駕駛技術(shù)發(fā)展趨勢
未來AI大模型的發(fā)展趨勢
變阻器的未來發(fā)展趨勢和前景如何?是否有替代品出現(xiàn)?
智能制造行業(yè)現(xiàn)狀與發(fā)展趨勢
機(jī)器視覺系統(tǒng)的工作原理和應(yīng)用領(lǐng)域
DC電源模塊的發(fā)展趨勢和前景展望

中國網(wǎng)絡(luò)交換芯片市場發(fā)展趨勢
視覺焊縫跟蹤系統(tǒng)的發(fā)展趨勢與挑戰(zhàn)

視覺上下料技術(shù)在智能制造領(lǐng)域的發(fā)展趨勢如何呢?
DC電源模塊的未來發(fā)展趨勢







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論