 激光視覺焊縫跟蹤系統結構詳解
激光視覺焊縫跟蹤系統結構詳解
??生產制造的不斷發展,對于產品焊接技術的要求也是越來越高,為了提升焊接產品的質量,以及降低勞動工人的勞動強度和工作環境。焊接自動化是一個重要方向,但是因為不少焊接作業都有特殊性,焊接工件容易變形,或者拼接不一致,這都給自動焊接增加了難題。焊縫跟蹤系統就是專門研發出來處理此類問題的,我們一起來看下激光視覺焊縫跟蹤系統的結構。
??激光視覺跟蹤系統結構
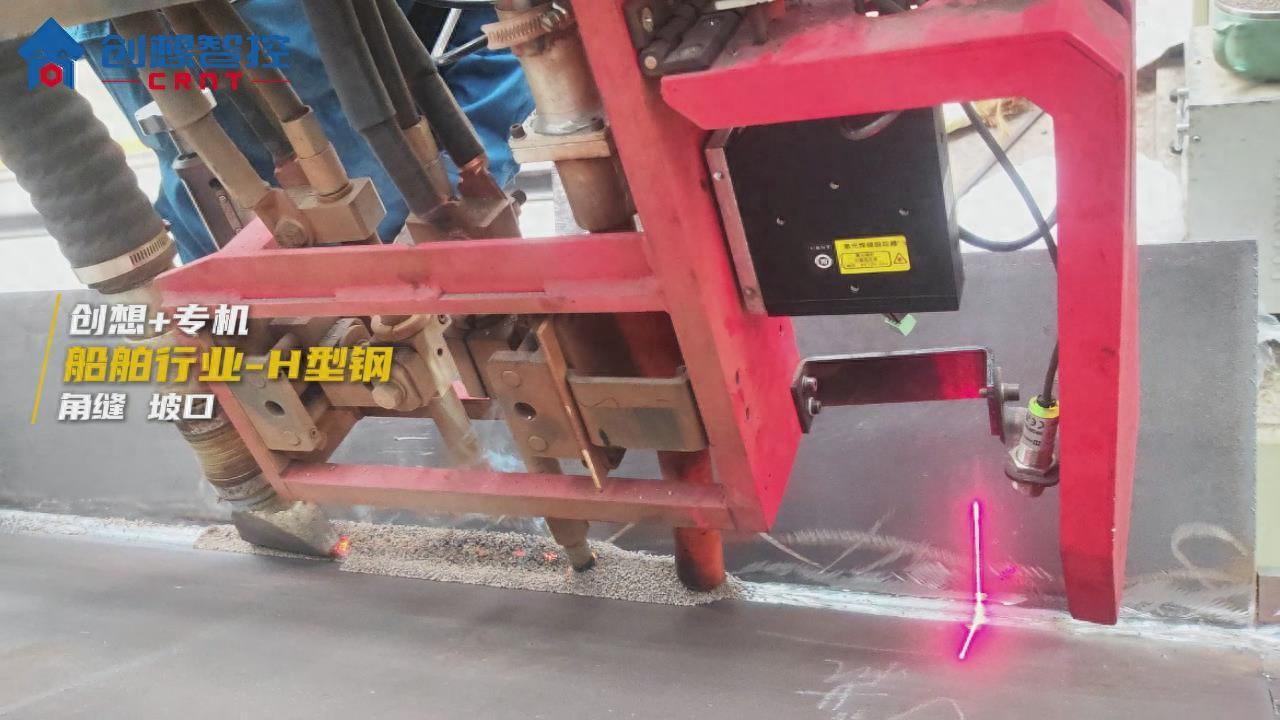
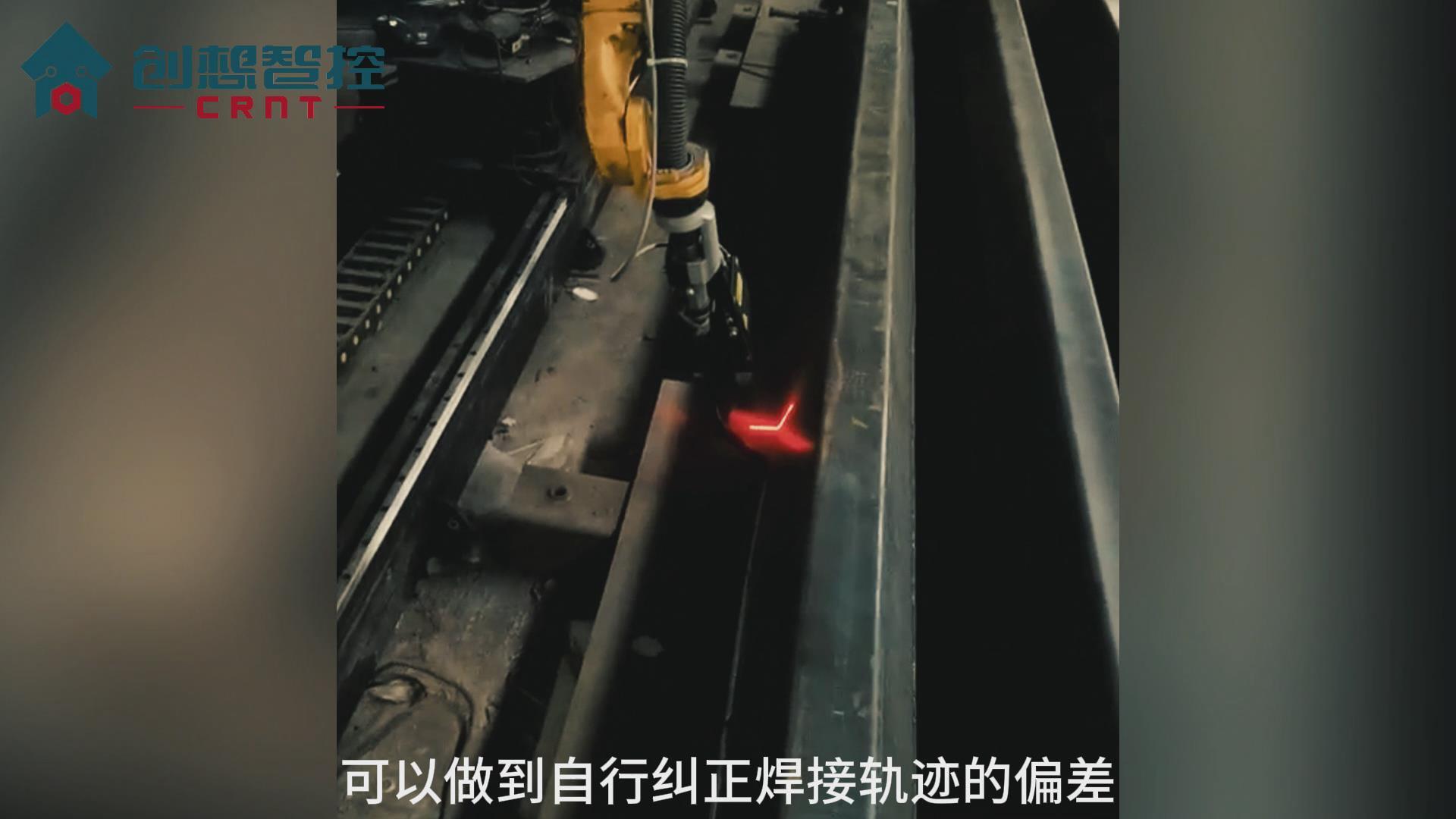
??激光器作為結構光源,以預定的角度將激光條紋投影到傳感器下部的工作表面,CCD直接觀察在傳感器下部的條紋。傳感器以預先設定的距離安裝在焊槍前部,因此它可以觀察焊縫。系統在進行跟蹤時,焊接速度和前視距離被用來計算延遲時間,保證焊槍沿著焊縫行進。
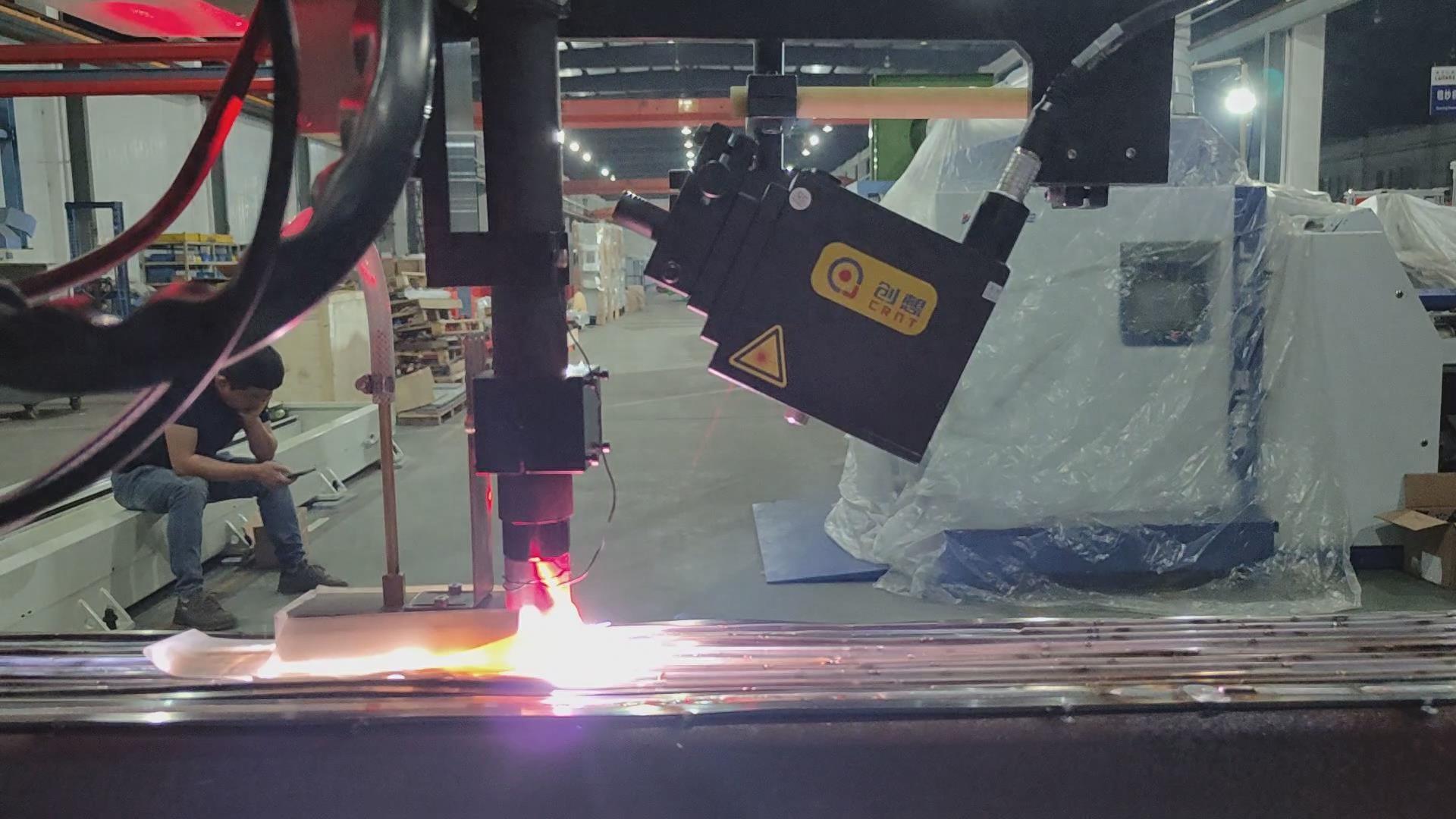
??激光視覺傳感器
??小巧緊湊的激光視覺傳感器一般安裝在焊矩邊上,傳感器里的激光二極管發射一束可見激光,經光闌變成一束扇形光帶照射到工件上,傳感器里有一與激光二極管成一角度設置的CCD攝像機,來自工件表面的反射光就將接頭的幾何輪廓成像在CCD上,利用光學三角法,不但可檢測到水平特征,而且傳感器與工件間的高度也可確定。
??傳感器的作用就是將被測的物理量轉換成與之有對應關系的有用電信號,以滿足信息處理和控制的要求。控制系統對來自傳感器的信號進行分析處理,得到控制信號。執行機構一般由電機和十字滑塊組成,伺服電機由控制信號控制。
??圖像前處理
??焊接機器人視覺系統中圖像處理基本可分為兩方面,一是將所獲得的原始圖像進行增強、濾波二值化等處理,目的是使得原始圖像去除噪音變得更加清晰,邊緣特征更加明顯,即前處理;二是將前處理后的圖像進行邊緣檢測.特征提取等操作,為了準確無誤地獲得焊縫的中心信息,以便機器人進行相應的坐標調整,滿足焊接質量的要求。對視覺焊縫跟蹤實時圖像處理的方法進行了研究,首先采用圖像增強來增加圖像對比度,采用中值濾波去除圖像噪聲,并用二值化法將目標圖像從背景圖像中提取出來。在后處理的研究中激光視覺焊縫跟蹤系統圖像處理的關鍵技術一微光帶中心線的抽取和特征點的檢測提出了切實可行的方法.采用中軸變換法提取的中心線單一連續;用斜率分析法來檢測特征點方便可靠。該處理方法能準確檢測焊縫特征點,處理速度快,能夠滿足跟蹤系統的實時性要求。
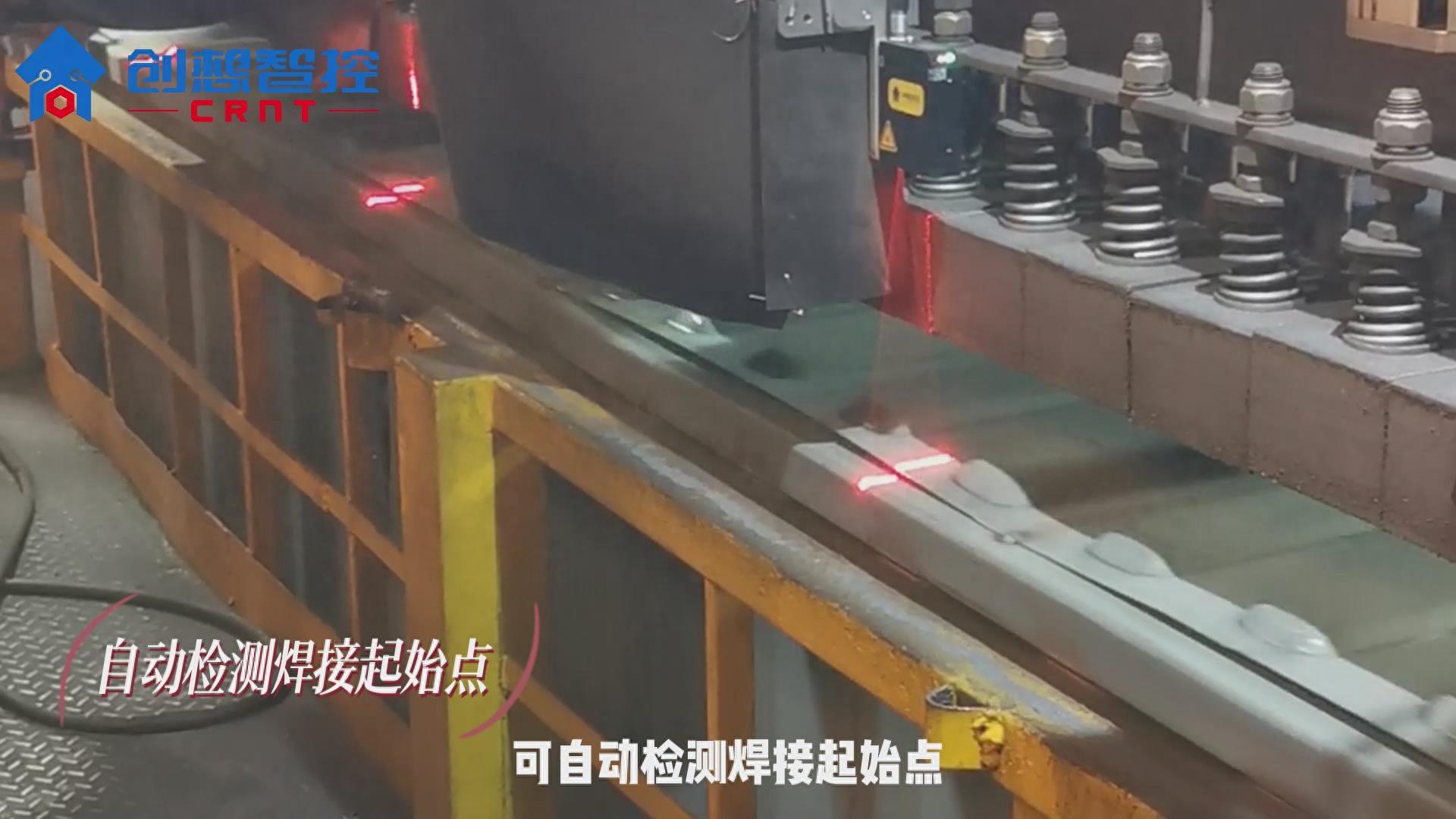
??上面內容就是對于激光視覺焊縫跟蹤系統結構的分析,激光視覺焊縫跟蹤系統在焊接作業開始之前,調整焊槍位置,使其對準焊縫中心,然后開啟電源,系統開始工作,程序開始運行,傳感器中的CCD便實時監視圖像,由軟件啟動一個定時器,根據焊接速度的要求,調節定時器的時間間隔,每隔一定的時間抓拍幅圖像,通過程序對圖像進行實時處理,得到圖像的焊縫中心,以當前焊縫中心相對于初始焊縫中心的偏差量為檢測量,輸出調整量給機器人控制器,控制機械手指引焊槍運行,實現自動跟蹤。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752019 -
焊縫跟蹤
+關注
關注
0文章
188瀏覽量
10429
發布評論請先 登錄
相關推薦
創想智控激光焊縫跟蹤系統協同焊接專機自動化焊接滅火器罐的應用

創想智控焊縫激光跟蹤系統協同發那科機器人在箱體自動焊接的應用


創想智控激光焊縫跟蹤系統在地磅秤自適應焊接的應用
如何集成激光焊縫跟蹤系統與現有焊接設備

創想智控焊縫跟蹤傳感器在歐式箱變底座拼接焊縫自動焊接的應用

創想智控激光焊縫跟蹤系統在波紋板自動化焊接的應用

激光焊縫跟蹤技術的精度和穩定性如何
視覺焊縫跟蹤系統的發展趨勢與挑戰

激光焊縫跟蹤系統在焊接自動化領域的發展前景和挑戰是什么







 工商網監
工商網監
評論