 鎖相環PLL的基礎知識
鎖相環PLL的基礎知識
鎖相環 (PLL) 電路存在于各種高頻應用中,從簡單的時鐘清理電路到用于高性能無線電通信鏈路的本振 (LO),再到矢量網絡分析儀 (VNA) 中的超快速開關頻率合成器。本文解釋了鎖相環電路的一些構建模塊,并參考了每種應用,以幫助指導新手和鎖相環專家導航器件選擇以及每種不同應用固有的權衡取舍。本文引用了ADI公司的ADF4xxx和HMCxxx系列PLL和壓控振蕩器(VCO),并使用ADIsimPLL(ADI公司內部PLL電路仿真器)來演示這些不同的電路性能參數。
基本配置:時鐘清理電路
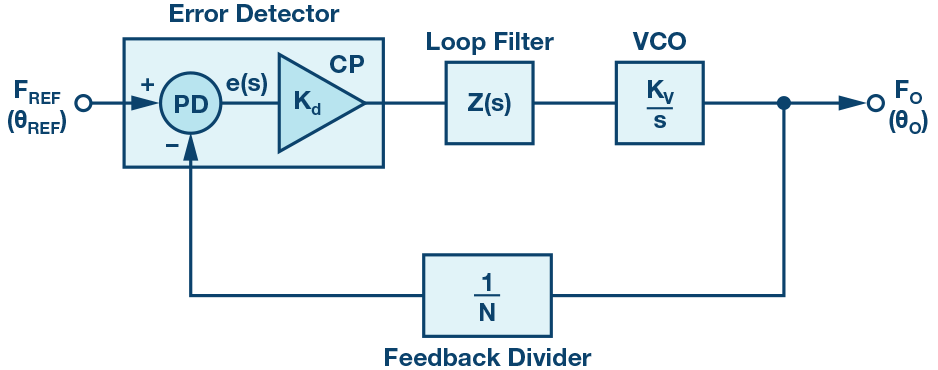
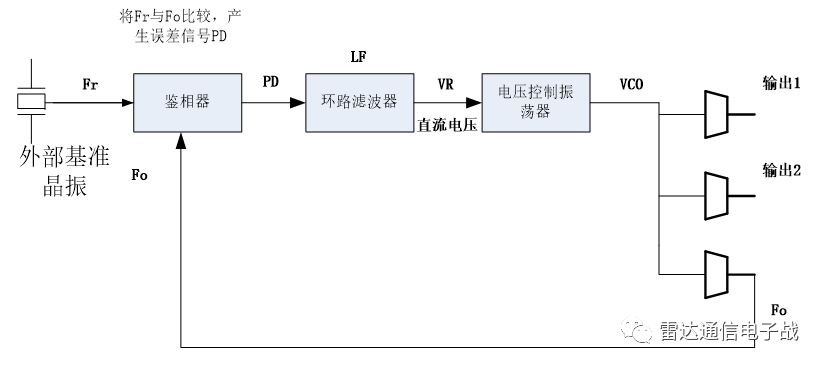
在最基本的配置中,鎖相環比較參考信號的相位(F裁判)到可調反饋信號(RF)的相位在) F0,如圖 1 所示。在圖2中,有一個在頻域中工作的負反饋控制環路。當比較處于穩態,并且輸出頻率和相位與誤差檢測器的輸入頻率和相位匹配時,我們說PLL被鎖定。出于本文的目的,我們僅考慮在ADI公司ADF4xxx系列PLL上實現的經典數字PLL架構。
該電路中的第一個基本元件是鑒頻鑒相器(PFD)。PFD 將輸入的頻率和相位與 REF 進行比較在反饋給RF的頻率和相位在.ADF4002是一款PLL,可配置為獨立PFD(反饋分壓器N = 1)。因此,它可以與高質量壓控晶體振蕩器(VCXO)和窄低通濾波器一起使用,以清除嘈雜的REF在時鐘。
數字。1 個基本 PLL 配置。
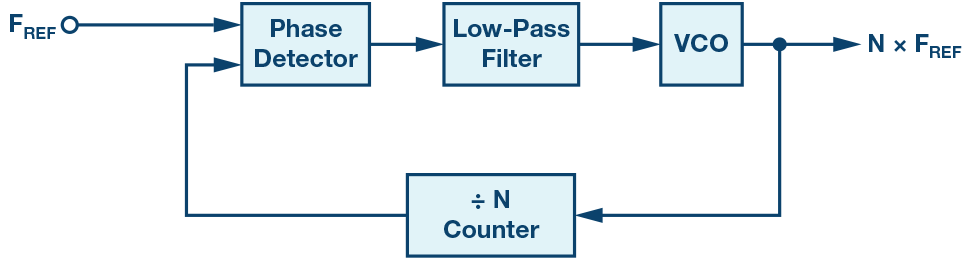
圖2.基本鎖相環配置。
相位頻率檢測器
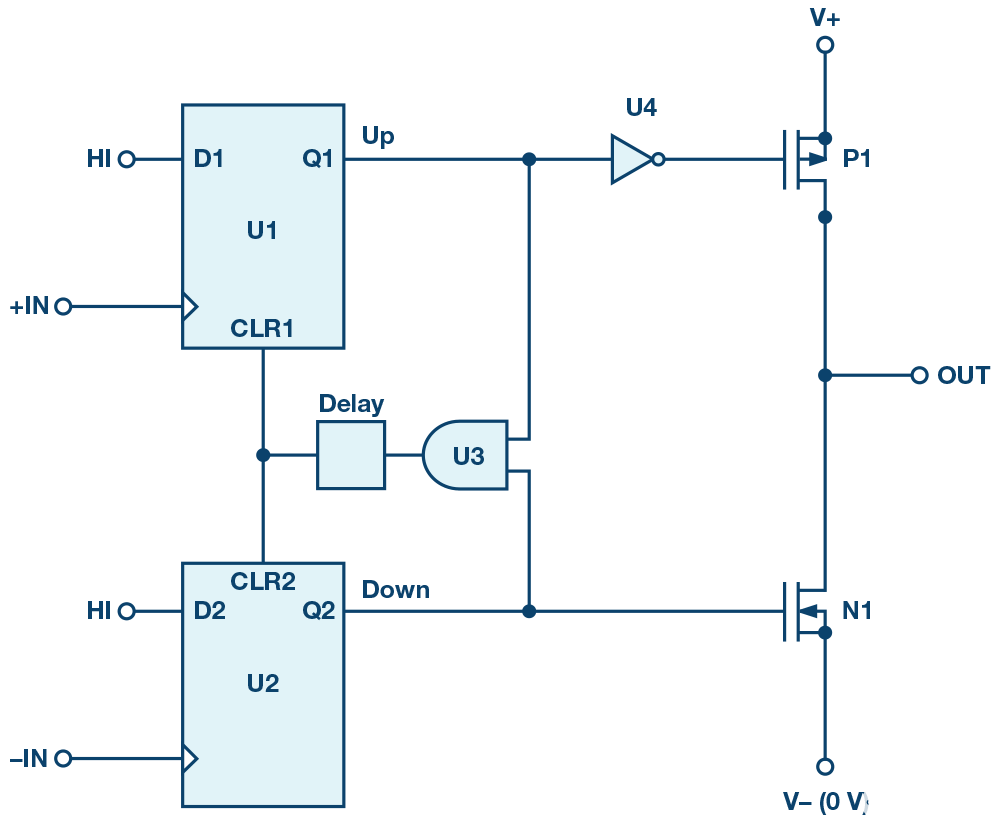
圖3.鑒頻鑒相器。
圖3中的鑒頻檢波器將輸入與F進行比較裁判在 +IN 處,反饋信號在 –IN 處。它使用兩個帶有延遲元件的 D 型觸發器。一個 Q 輸出使能一個正電流源,另一個 Q 輸出使能一個負電流源。這些電流源稱為電荷泵。有關PFD操作的更多詳細信息,請參閱“高頻接收器和發射器的鎖相環”。
采用這種架構時,下面+IN的輸入頻率高于–IN(圖4),產生的電荷泵輸出泵浦電流很高,當集成在PLL低通濾波器中時,將推高VCO的調諧電壓。這樣,–IN頻率將隨著VCO的增加而增加,兩個PFD輸入最終將收斂或鎖定到相同的頻率(圖5)。如果 –IN 的頻率高于 +IN,則會發生相反的情況。
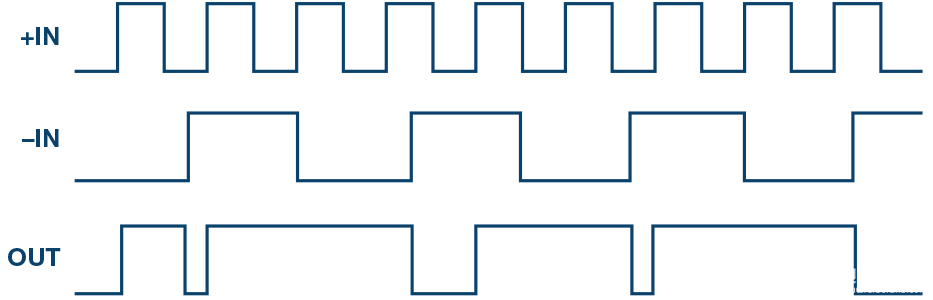
圖4.PFD 異相和頻率鎖定。
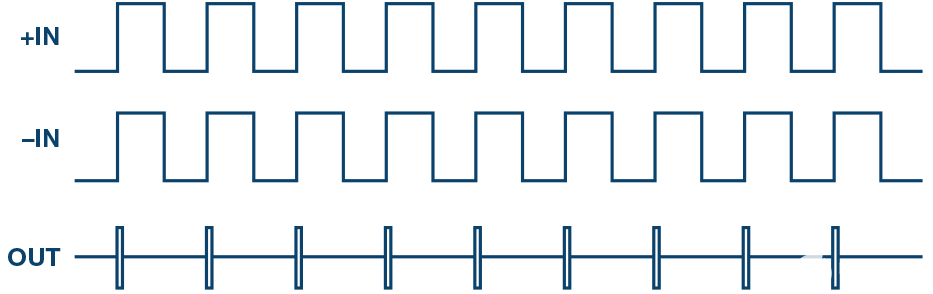
圖5.鑒相器、頻率和鎖相。
回到需要清潔的噪聲時鐘的原始示例,時鐘的相位噪聲曲線、自由運行的VCXO和閉環PLL可以在ADIsimPLL中建模。
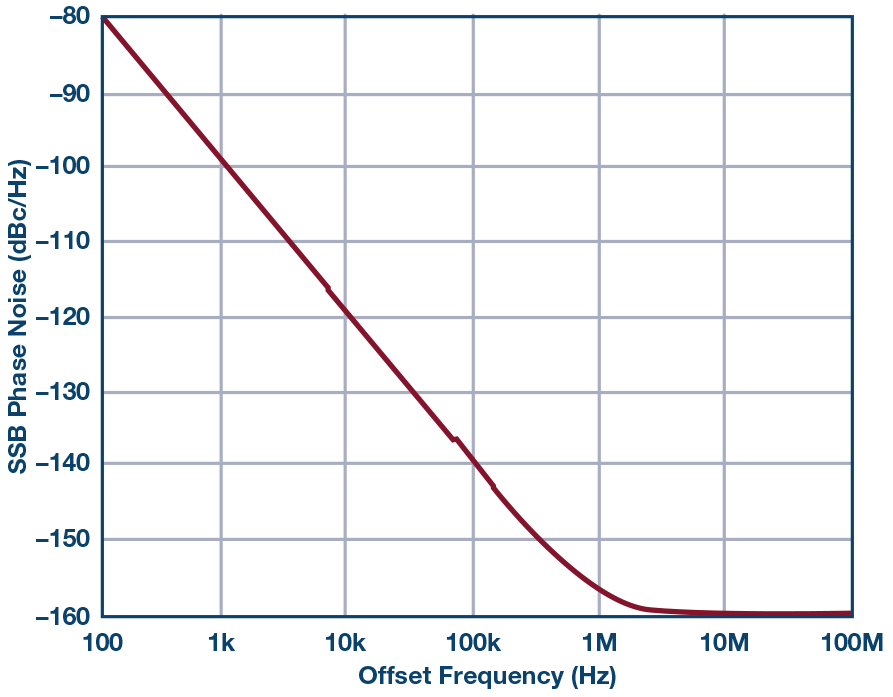
圖6.參考噪聲。
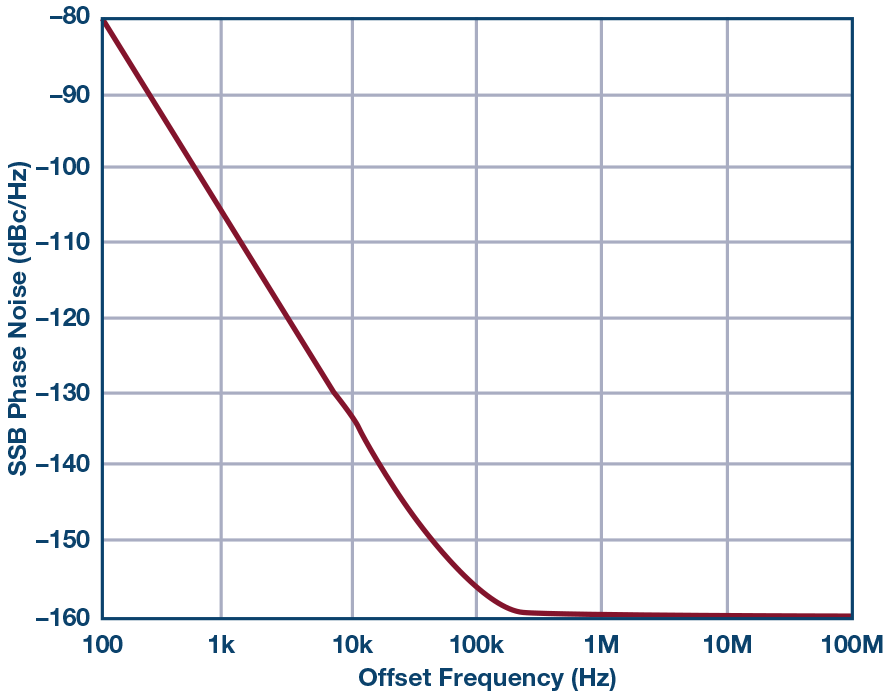
圖7.自由運行VCXO。
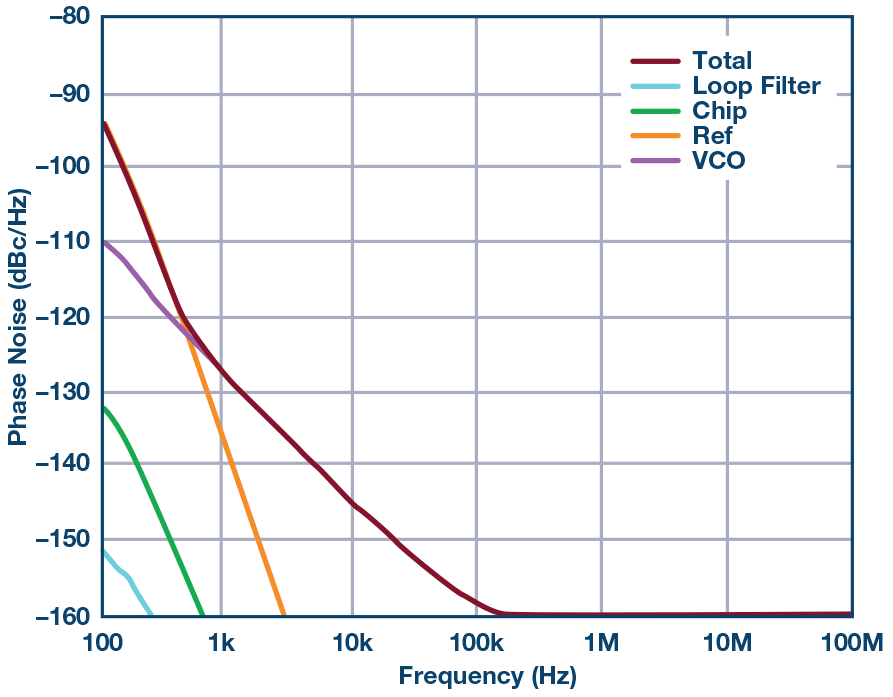
圖8.總鎖相環噪聲。
從所示的ADIsimPLL圖中可以看出,REF的噪聲相位噪聲曲線在(圖6)由低通濾波器濾波。PLL基準電壓源和PFD電路貢獻的所有帶內噪聲都被低通濾波器濾除,只留下環路帶寬之外的VCXO噪聲(圖7)(圖8)。當輸出頻率等于輸入頻率時,它會產生最簡單的PLL配置之一。這種PLL稱為時鐘清理PLL。對于此類時鐘清理應用,建議使用窄(<1 kHz)低通濾波器帶寬。
高頻整數 N 分頻架構
為了產生更高頻率的范圍,使用VCO,其調諧范圍比VCXO更寬。這通常用于跳頻或擴頻跳頻 (FHSS) 應用。在此類PLL中,輸出是參考頻率的高倍數。壓控振蕩器包含一個可變調諧元件,例如變容二極管,其電容隨輸入電壓變化,從而允許可調諧諧振電路,從而產生一系列頻率(圖 9)。PLL可以被認為是該VCO的控制系統。
反饋分頻器用于將VCO頻率分頻至PFD頻率,從而允許PLL產生是PFD頻率倍數的輸出頻率。基準電壓源路徑中也可以使用分頻器,這允許使用比PFD頻率更高的頻率基準。像這樣的PLL就是ADI公司的ADF4108。PLL計數器是我們電路中要考慮的第二個基本元件。
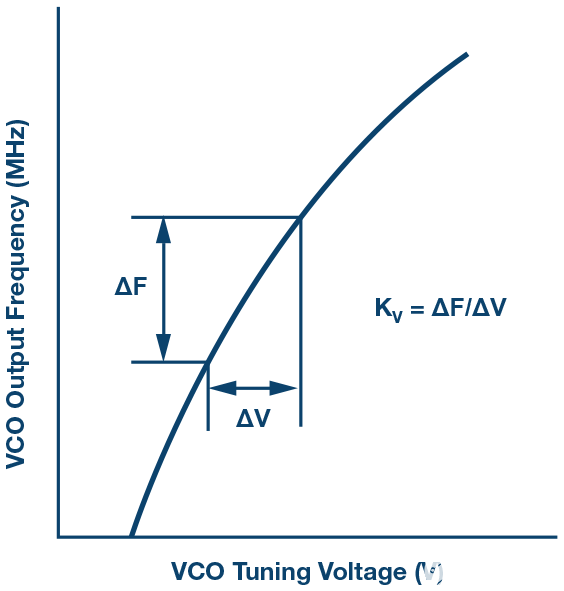
圖9.壓控振蕩器。
PLL的關鍵性能參數是相位噪聲、頻率合成過程中不需要的副產品或雜散頻率(簡稱雜散)。對于整數N分頻PLL,雜散頻率由PFD頻率產生。來自電荷泵的漏電流將調制VCO的調諧端口。低通濾波器會減小這種影響,低通濾波器越窄,雜散頻率的濾波越大。理想音調沒有噪聲或額外的雜散頻率(圖 10),但實際上相位噪聲表現為載波周圍的裙邊,如圖 11 所示。單邊帶相位噪聲是1 Hz帶寬內載波的相對噪聲功率,在與載波的頻率偏移處指定。
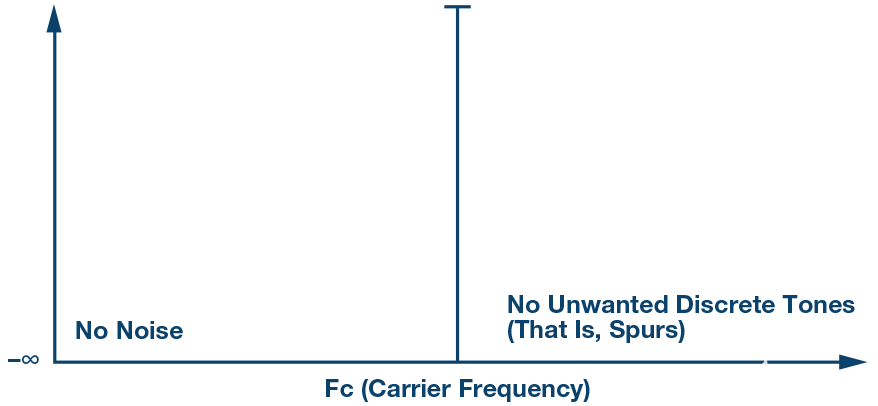
圖 10.理想的LO頻譜。
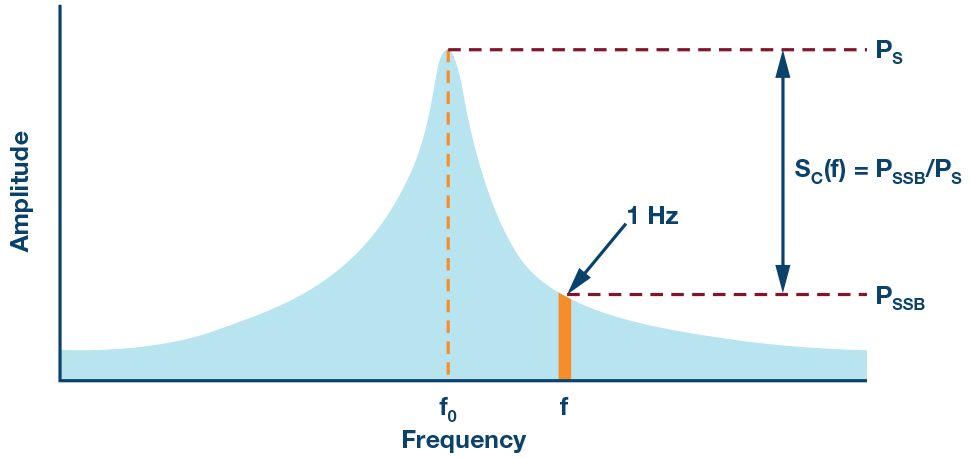
圖 11.單邊帶相位噪聲。
整數 N 分頻器和小數 N 分頻器
對于窄帶應用,通道間距較窄(通常為<5 MHz),反饋計數器N較高。如圖 12 所示,通過使用雙模 P/P + 1 預分頻器,可以使用小電路獲得高 N 值,并允許通過計算 N = PB + A 來計算 N 個值,以 8/9 預分頻器和 N 值 90 為例,計算 B 的值為 11,A 的值為 2。雙模預分頻器將在 A 或兩個周期內除以 9。然后,它將除以 8 表示剩余 (B-A) 或 9 個周期,如表 1 中所述。預分頻器通常使用更高頻率的電路技術設計,例如雙極性發射極耦合邏輯(ECL)電路,而A和B計數器可以采用這種較低頻率的預分頻器輸出,并且可以使用較低速度的CMOS電路制造。這減少了電路面積和功耗。像ADF4002這樣的低頻清理PLL省略了這個預分頻器。
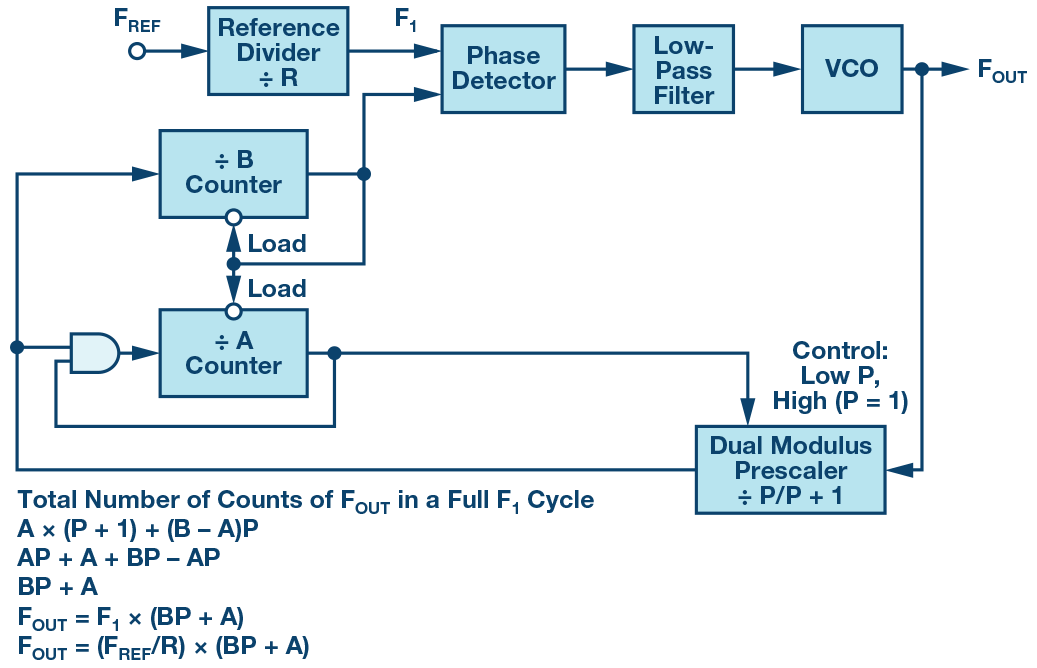
圖 12.帶雙模數 N 計數器的 PLL。
| N 值 | P/P + 1 | B 值 | 一個值 |
| 90 | 9 | 11 | 2 |
| 81 | 9 | 10 | 1 |
| 72 | 8 | 9 | 0 |
| 64 | 8 | 8 | 0 |
| 56 | 8 | 7 | 0 |
| 48 | 8 | 6 | 0 |
| 40 | 8 | 5 | 0 |
| 32 | 8 | 4 | 0 |
| 24 | 8 | 3 | 0 |
| 16 | 8 | 2 | 0 |
| 8 | 8 | 1 | 0 |
| 0 | 8 | 0 | 0 |
帶內(PLL環路濾波器帶寬內)相位噪聲直接受N值的影響,帶內噪聲增加20log (N)。因此,對于N值較高的窄帶應用,帶內噪聲主要由高N值主導。允許低得多的N值但仍允許精細分辨率的系統由小數N分頻頻率合成器(如ADF4159或HMC704)實現。通過這種方式,可以大大降低帶內相位噪聲。圖 13 到 16 說明了如何實現這一點。在這些示例中,兩個PLL用于生成適合5G系統本振(LO)的頻率,范圍為7.4 GHz至7.6 GHz,通道分辨率為1 MHz。ADF4108采用N分頻配置(圖13),HMC704采用小數N分頻配置。HMC704(圖14)可與50 MHz PFD頻率配合使用,從而降低N值,從而降低帶內噪聲,同時仍允許1 MHz(或更小)的頻率步長——注意到15 dB(在8 kHz偏移頻率下)的改進(圖15與圖16)。然而,ADF4108被迫使用1 MHz PFD來實現相同的分辨率。
需要小心使用小數N分頻PLL,以確保雜散音不會降低系統性能。在HMC704等PLL上,整數邊界雜散(當N值的小數部分接近0或1時產生,如147.98或148.02非常接近整數值148)最受關注。這可以通過將VCO輸出緩沖到RF輸入和/或仔細的頻率規劃來緩解,其中REF在可以更改以避免這些更成問題的頻率。
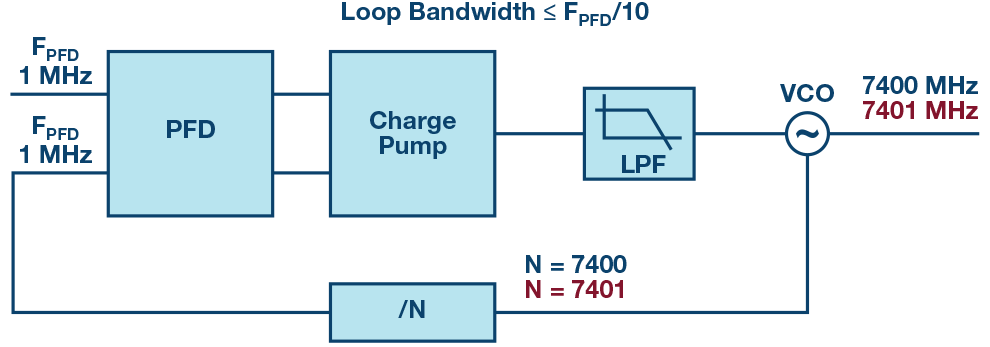
圖 13.整數 N 鎖相環。
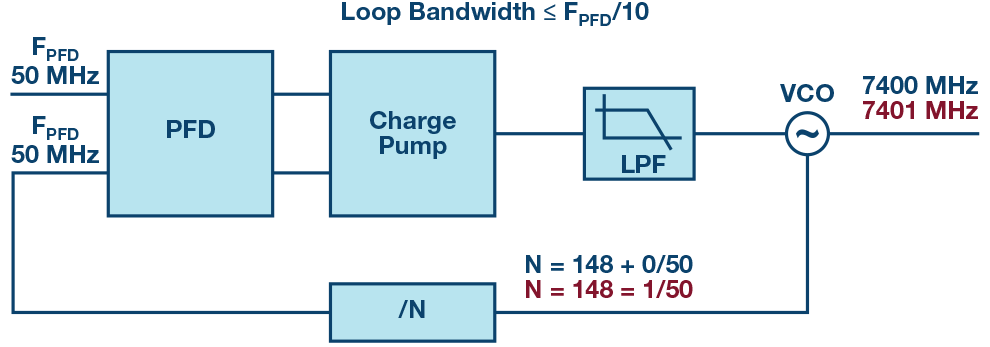
圖 14.小數 N 分頻鎖相環。
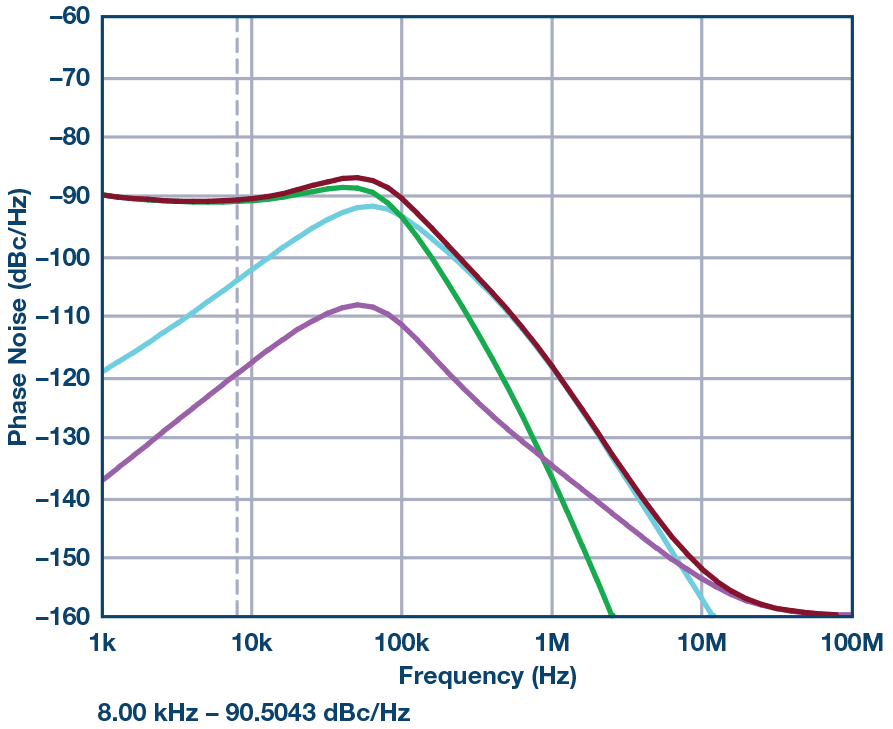
圖 15.整數 N 分頻 PLL 帶內相位噪聲。
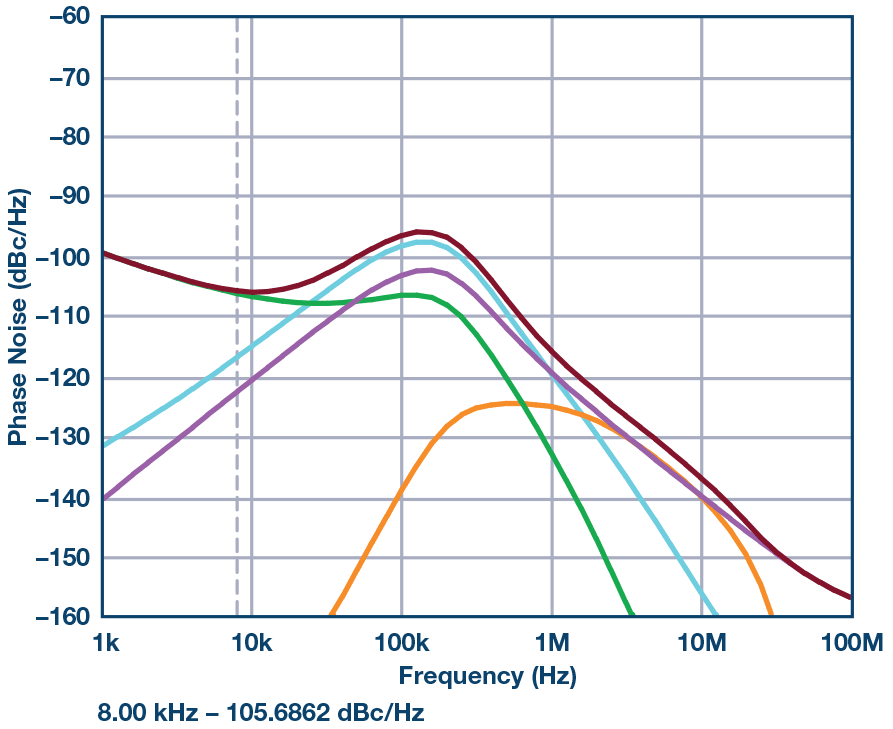
圖 16.小數N分頻PLL帶內相位噪聲。
對于大多數PLL,帶內噪聲高度依賴于N值以及PFD頻率。減去 20log (N) 和 10log (F聚苯乙烯),從帶內相位噪聲測量的平坦部分得出品質因數(FOM)。選擇 PLL 的一個常見指標是比較 FOM。影響帶內噪聲的另一個因素是1/f噪聲,它取決于器件的輸出頻率。FOM貢獻和1/f噪聲以及參考噪聲主導PLL系統的帶內噪聲。
用于 5G 通信的窄帶 LO
對于通信系統,從PLL的角度來看,主要規格是誤差矢量幅度(EVM)和VCO阻塞規格。EVM的范圍類似于積分相位噪聲,后者考慮了一系列偏移的噪聲貢獻。對于前面列出的 5G 系統,集成限制相當寬,從 1 kHz 開始一直持續到 100 MHz。 EVM 可以被認為是完美調制信號從其理想點降級的百分比,以百分比表示(圖 17)。以類似的方式,積分相位噪聲將載波不同偏移處的噪聲功率積分,并將該噪聲表示為與輸出頻率相比的dBc數。ADIsimPLL可以配置為計算EVM、積分相位噪聲以及均方根相位誤差和抖動。現代信號源分析儀只需按一下按鈕即可包含這些數字(圖 18)。隨著調制方案密度的增加,EVM 變得至關重要。對于 16-QAM,根據 ETSI 規范 3GPP TS 36.104,所需的最低 EVM 為 12.5%。對于 64-QAM,要求為 8%。然而,由于EVM由功率放大器失真和不需要的混頻器產物引起的各種其他非理想參數組成,因此積分噪聲(以dBc為單位)通常單獨定義。
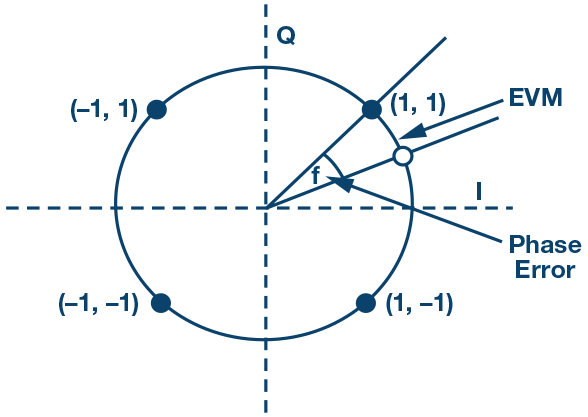
圖 17.相位誤差可視化。
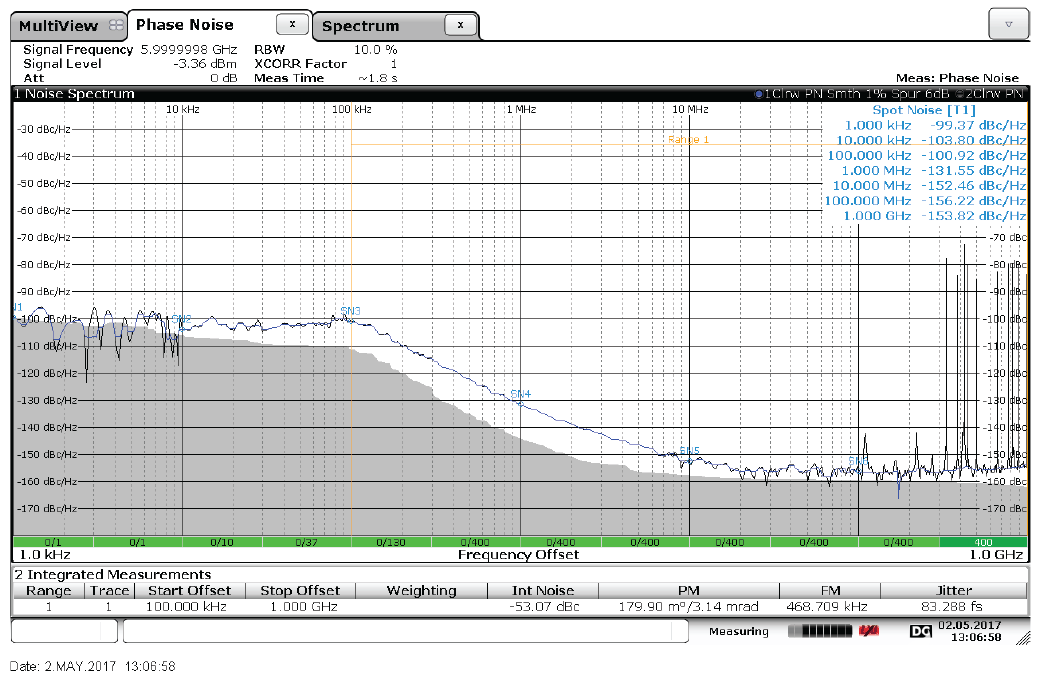
圖 18.信號源分析儀圖。
VCO阻斷規范在需要考慮強傳輸存在的蜂窩系統中非常重要。如果接收器信號較弱,并且VCO噪聲太大,則附近的發射器信號可能會混頻并淹沒所需信號(圖19)。圖19中的插圖演示了如果接收器VCO噪聲,附近以–25 dBm功率發射的發射器(800 kHz遠)如何淹沒–101 dBm的所需信號。這些規范構成了無線通信標準的一部分。阻塞規范直接影響VCO的性能要求。
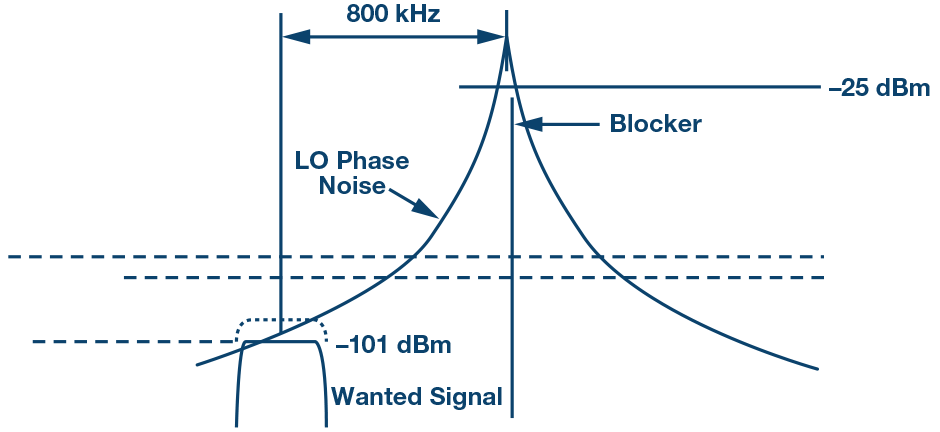
圖 19.VCO 噪音阻斷器。
壓控振蕩器 (VCO)
電路中要考慮的下一個PLL電路元件是壓控振蕩器。對于VCO,必須在相位噪聲、頻率覆蓋和功耗之間進行基本的權衡。振蕩器的品質因數(Q)越高,VCO相位噪聲越低。然而,Q值較高的電路具有較窄的頻率范圍。增加電源也會降低相位噪聲。從ADI公司的VCO系列來看,HMC507的工作范圍為6650 MHz至7650 MHz,100 kHz時的VCO噪聲約為–115 dBc/Hz。相比之下,HMC586覆蓋4000 MHz至8000 MHz的完整倍頻程,但相位噪聲更高,為–100 dBc/Hz。在此類VCO中最小化相位噪聲的一種策略是增加V的電壓調諧范圍調整至 VCO(高達 20 V 或更高)。這增加了PLL電路的復雜性,因為大多數PLL電荷泵只能調諧到5 V,因此使用使用運算放大器的有源濾波器自行增加PLL電路的調諧電壓。
多頻段集成相環和虛擬視頻單元
在不降低VCO相位噪聲的情況下增加頻率覆蓋范圍的另一種策略是使用多頻段VCO,其中重疊的頻率范圍用于覆蓋倍頻程范圍,并且可以通過在VCO輸出端使用分頻器來產生較低的頻率。ADF4356就是這樣一款器件,它使用四個主VCO內核,每個內核具有256個重疊頻率范圍。器件使用內部基準和反饋分頻器來選擇合適的VCO頻段,這一過程稱為VCO頻段選擇或自動校準。
多頻段VCO的寬調諧范圍使其適用于寬帶儀器,在這些儀器中,它們會產生廣泛的頻率。39位的小數N分頻分辨率也使其成為這些精確頻率應用的理想選擇。在矢量網絡分析儀等儀器中,超快的開關速度至關重要。這可以通過使用非常寬的低通濾波器帶寬來實現,該帶寬可以非常快速地調諧到最終頻率。在這些應用中,通過使用查找表,可以繞過自動頻率校準程序,并為每個頻率直接編程頻率值,真正的單核寬帶VCO如HMC733也可以以較低的復雜性使用。
對于鎖相環電路,低通濾波器的帶寬直接影響系統的建立時間。低通濾波器是我們電路中的最后一個元件。如果建立時間至關重要,則應將環路帶寬增加到允許的最大帶寬,以實現穩定的鎖定并滿足相位噪聲和雜散頻率目標。通信鏈路中的窄帶需求意味著,使用HMC507時,低通濾波器實現最小集成噪聲(30 kHz至100 MHz之間)的最佳帶寬約為207 kHz(圖20)。這提供了大約 –51 dBc 的積分噪聲,并在大約 51 μs 內實現頻率鎖定在 1 kHz 以內的誤差(圖 22)。
相比之下,寬帶HMC586(覆蓋4 GHz至8 GHz)以接近300 kHz帶寬的更寬帶寬實現了最佳的均方根相位噪聲(圖21),實現了–44 dBc的集成噪聲。但是,它在不到 27 μs 的時間內實現了相同規格的頻率鎖定(圖 23)。正確的器件選擇和周圍的電路設計對于實現應用的最佳結果都至關重要。
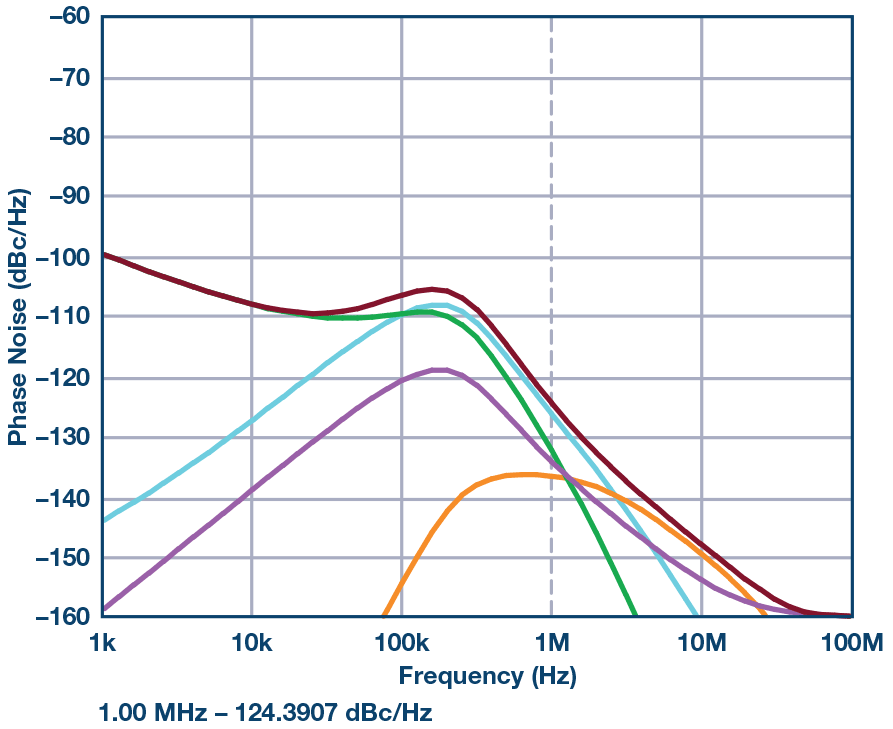
圖 20.相位噪聲HMC704加HMC507。
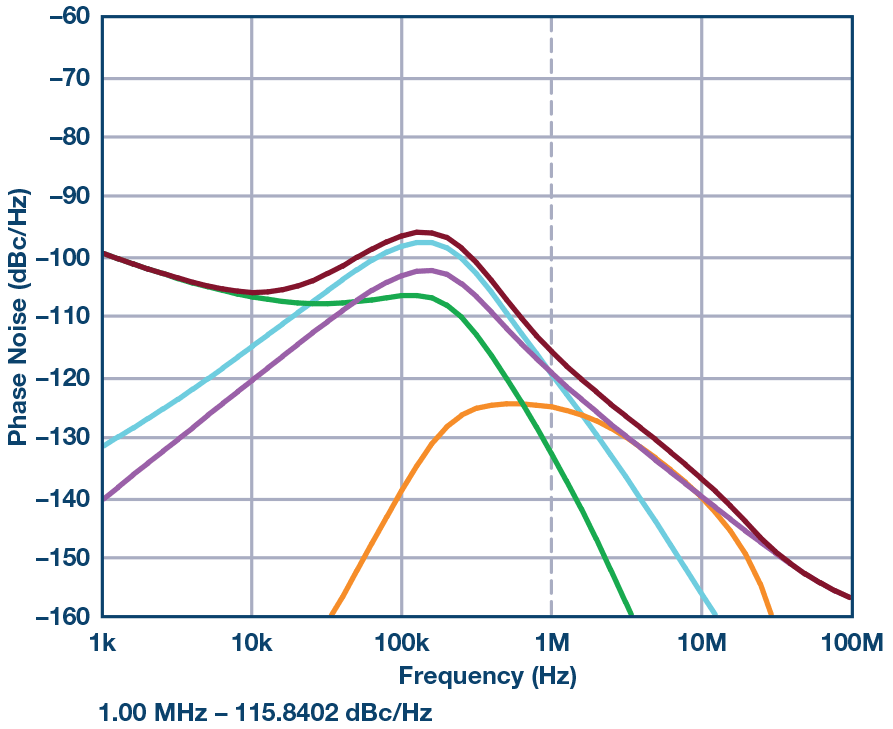
圖 21.相位噪聲HMC704加HMC586。
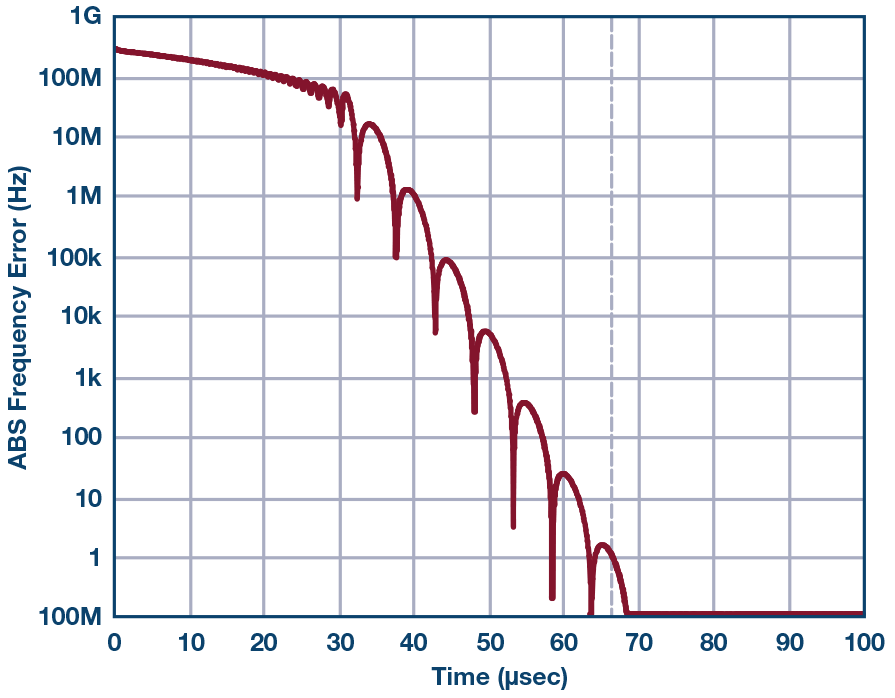
圖 22.頻率建立:HMC704和HMC507。
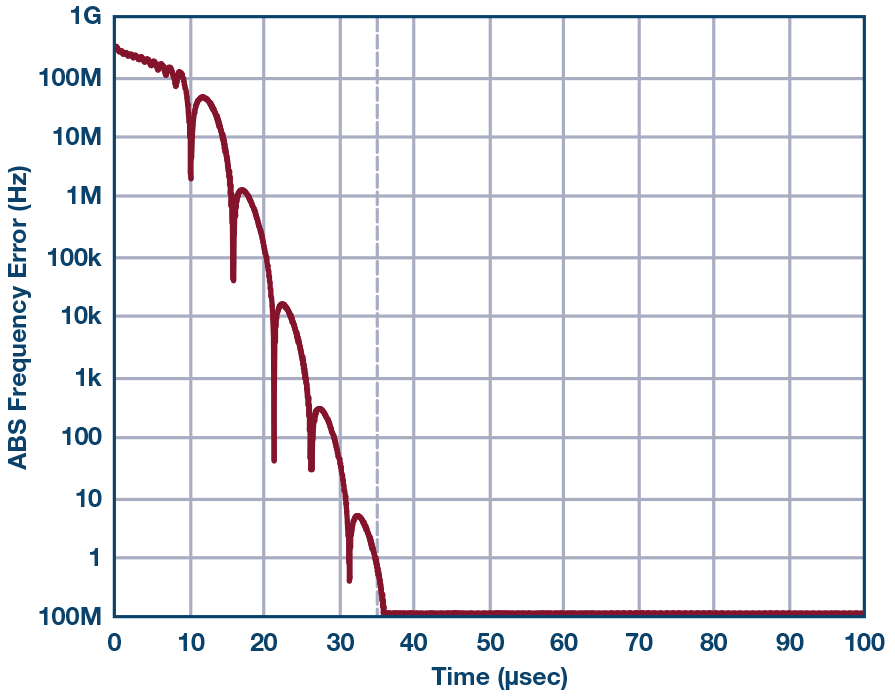
圖 23.HMC704 plus HMC586。
低抖動時鐘
對于高速數模轉換器(DAC)和高速模數轉換器(ADC),干凈的低抖動采樣時鐘是必不可少的構建模塊。為了最小化帶噪聲,需要低N值;但為了盡量減少雜散噪聲,最好使用整數N。時鐘往往是固定頻率,因此可以選擇頻率以確保 REF在頻率是輸入頻率的精確整數倍。這確保了最低的帶內PLL噪聲。需要選擇VCO(無論是否集成),以確保其噪聲對于應用來說足夠低,特別注意寬帶噪聲。然后需要小心放置低通濾波器,以確保帶內PLL噪聲與VCO噪聲相交,從而確保最低均方根抖動。相位裕量為60°的低通濾波器可確保最低的濾波器峰值,從而最大限度地減少抖動。這樣,低抖動時鐘介于本文討論的第一個電路的時鐘清理應用與討論的最后一個電路的快速開關能力之間。
對于時鐘電路,時鐘的均方根抖動是關鍵性能參數。這可以使用ADIsimPLL進行估算,也可以使用信號源分析儀進行測量。對于ADF5356等高性能PLL器件,具有132 kHz的相對較寬的低通濾波器帶寬以及超低REF在像Wenxel OCXO這樣的源允許用戶設計均方根抖動低于90 fs的時鐘(圖26)。操縱PLL環路濾波器帶寬(LBW)的位置表明,將其降低太多會產生VCO噪聲在小偏移處開始占主導地位(圖24),而帶內PLL噪聲實際上會更低,而增加太多意味著帶內噪聲在VCO噪聲明顯較低的偏移處占主導地位(圖25)。
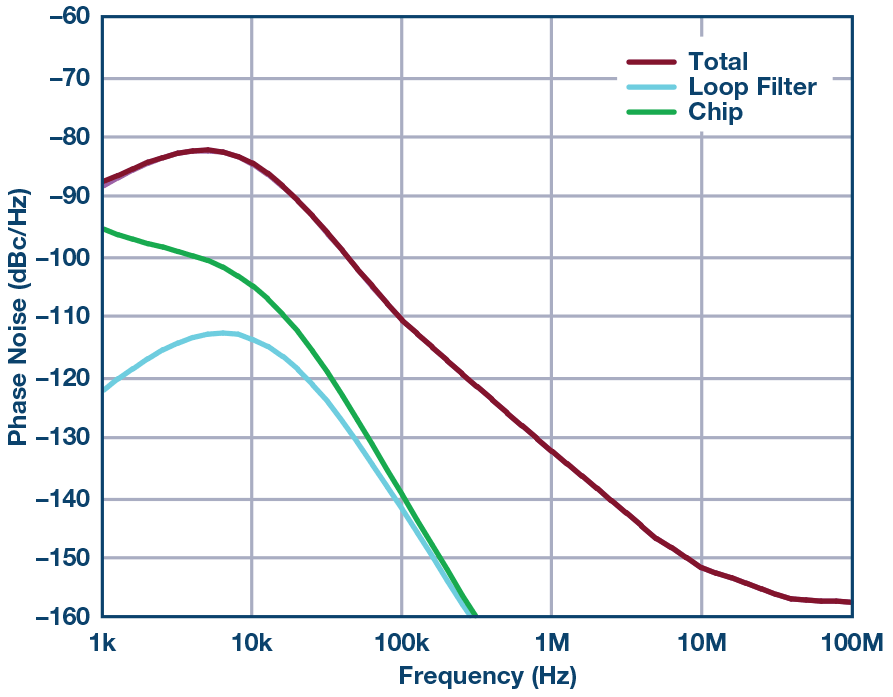
圖 24.LBW = 10 kHz,331 fs 抖動。
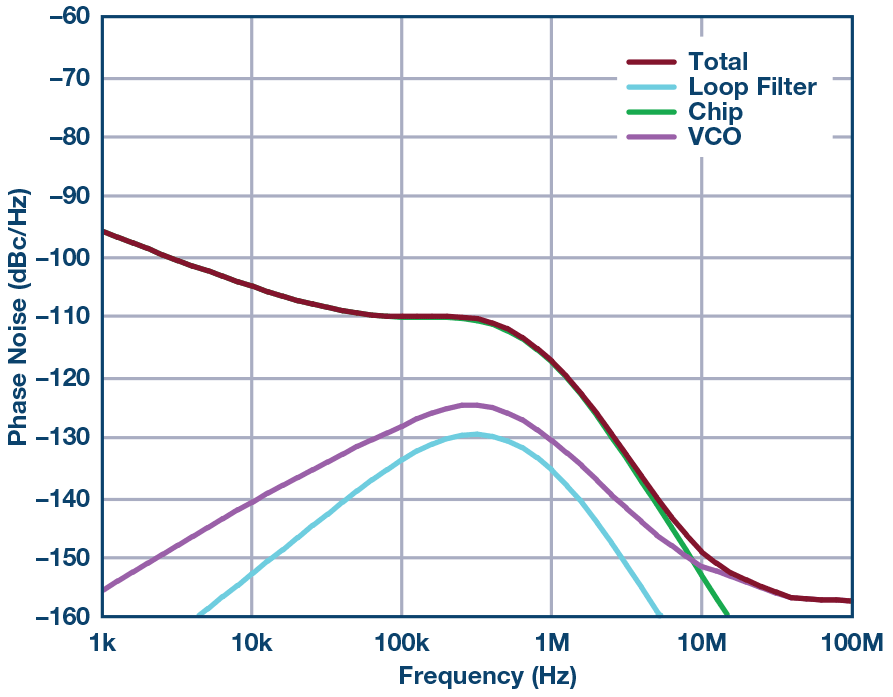
圖 25.LBW = 500 kHz,111 fs 抖動。
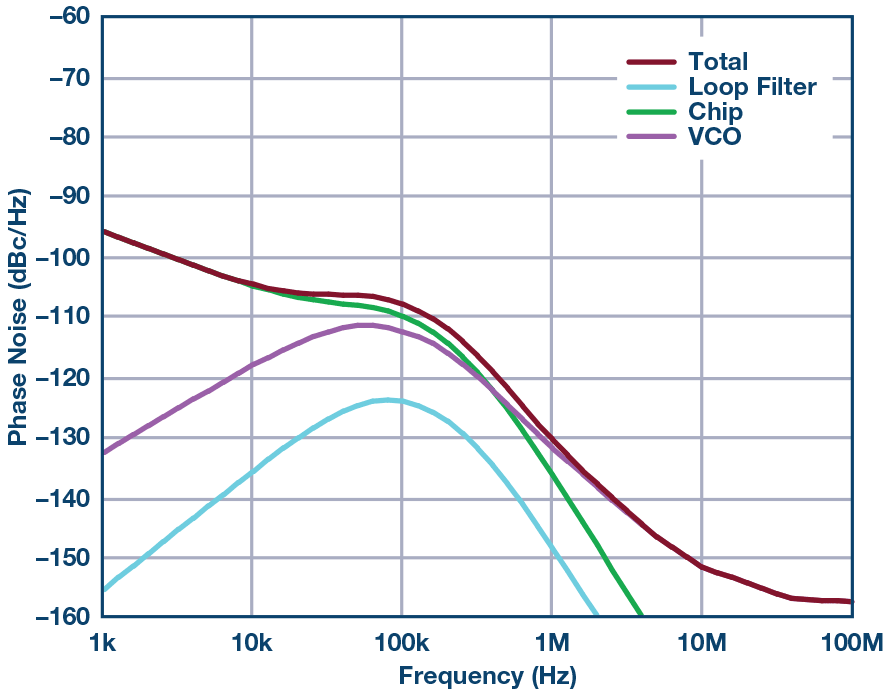
圖 26.LBW = 132 kHz,83 fs 抖動。
審核編輯:郭婷
-
轉換器
+關注
關注
27文章
8624瀏覽量
146861 -
鎖相環
+關注
關注
35文章
583瀏覽量
87692 -
pll
+關注
關注
6文章
774瀏覽量
135046
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論