") 用于在超聲圖像中對(duì)毫米尺度機(jī)器人膠囊進(jìn)行2D姿態(tài)估計(jì)的方法
用于在超聲圖像中對(duì)毫米尺度機(jī)器人膠囊進(jìn)行2D姿態(tài)估計(jì)的方法
具有移動(dòng)能力和采樣機(jī)構(gòu)的可口服機(jī)器人膠囊在胃腸道無(wú)創(chuàng)診斷和介入治療方面具有巨大的潛力。實(shí)時(shí)跟蹤膠囊位置和運(yùn)行狀態(tài)對(duì)于臨床應(yīng)用是必要的,但這仍然是一個(gè)重大挑戰(zhàn)。
據(jù)麥姆斯咨詢報(bào)道,近日,加拿大多倫多大學(xué)(University of Toronto)和美國(guó)范德堡大學(xué)(Vanderbilt University)的研究人員組成的團(tuán)隊(duì)在Scientific Reports期刊上發(fā)表了題為“Capsule robot pose and mechanism state detection in ultrasound using attention-based hierarchical deep learning”的最新論文,提出了一種基于注意力的分層深度學(xué)習(xí)方法,以用于在超聲圖像中對(duì)毫米尺度機(jī)器人膠囊進(jìn)行2D姿態(tài)估計(jì)和機(jī)構(gòu)狀態(tài)檢測(cè)。實(shí)驗(yàn)結(jié)果表明,膠囊狀態(tài)分類的準(zhǔn)確率為97%,方位和質(zhì)心位置的平均估計(jì)誤差為2.0°和0.24mm(膠囊體長(zhǎng)的1.7%)。提出的方法有望推進(jìn)無(wú)線膠囊機(jī)器人技術(shù)的發(fā)展。
無(wú)線膠囊機(jī)器人在靶向給藥、活檢取樣和胃腸道(GI)局部診斷等任務(wù)中顯示出巨大的潛力。盡管內(nèi)窺鏡手術(shù)通常被用于胃腸道的診斷和治療,但內(nèi)窺鏡檢查需要麻醉,并存在腸道破裂的風(fēng)險(xiǎn)。基于微創(chuàng)膠囊機(jī)器人的技術(shù)有望替代內(nèi)窺鏡。對(duì)于使用無(wú)線膠囊機(jī)器人進(jìn)行活檢或靶向治療等手術(shù),需要準(zhǔn)確和實(shí)時(shí)地跟蹤膠囊位置和運(yùn)行狀態(tài)。
磁定位技術(shù)作為一種用于無(wú)線膠囊內(nèi)窺鏡(WCE)姿態(tài)估計(jì)的無(wú)遮擋跟蹤方案已被廣泛研究。典型的配置是將一個(gè)或多個(gè)小永磁體封裝在膠囊中,并使用外部傳感器根據(jù)感測(cè)到的磁場(chǎng)數(shù)據(jù)確定膠囊的姿態(tài)。現(xiàn)有方法以高定位精度實(shí)現(xiàn)了實(shí)時(shí)精度,但是由于執(zhí)行器對(duì)定位系統(tǒng)的干擾,因此無(wú)法實(shí)現(xiàn)對(duì)膠囊的同步磁驅(qū)動(dòng)。
為了解決這個(gè)問(wèn)題,研究人員已經(jīng)提出了一種約束在3 x 3平面內(nèi)的線圈系統(tǒng),以最小化執(zhí)行器對(duì)傳感器的影響。Y. Xu等實(shí)現(xiàn)了WCE的同步磁驅(qū)動(dòng)和定位,并通過(guò)使用積分濾波器消除了磁干擾。然而,這種系統(tǒng)受限于相對(duì)較低的姿態(tài)更新頻率(約0.5~1.0Hz)。此外,磁跟蹤無(wú)法對(duì)胃腸道生理學(xué)方面進(jìn)行定位,而這對(duì)于許多應(yīng)用(例如靶向取樣、活檢或治療遞送等)來(lái)說(shuō)是必需的。超聲引導(dǎo)的膠囊機(jī)器人將通過(guò)使用安全、無(wú)創(chuàng)成像模式跟蹤膠囊來(lái)解決這些障礙,該成像模式還有潛力定位膠囊的胃腸道位置。
與磁共振成像(MRI)和X射線等其他醫(yī)學(xué)成像技術(shù)相比,超聲成像技術(shù)因其結(jié)合了高時(shí)間分辨率和無(wú)電離輻射成像,成本較低,且更容易實(shí)現(xiàn),因此受到人們青睞。盡管超聲成像已在許多臨床應(yīng)用中使用,但使用GI超聲成像膠囊仍存在一些挑戰(zhàn)。胃腸道由5個(gè)管狀組織層組成,這些組織層是交替產(chǎn)生回聲和消聲的材料,在超聲B模式掃描中表現(xiàn)為亮層和暗層。此外,胃腸道內(nèi)部充滿了空氣、水和消化物質(zhì)的混合物,這在超聲B模式圖像中表現(xiàn)為許多斑點(diǎn)和明暗對(duì)比的區(qū)域。在這種環(huán)境下,膠囊機(jī)器人的精確檢測(cè)和跟蹤是非常具有挑戰(zhàn)性的。
雖然超聲成像被熟練的超聲醫(yī)師手動(dòng)使用作為診斷工具,但仍需要對(duì)膠囊機(jī)器人進(jìn)行基于計(jì)算機(jī)的自動(dòng)跟蹤,因?yàn)椋?)具有移動(dòng)或機(jī)構(gòu)驅(qū)動(dòng)能力的膠囊機(jī)器人必須同時(shí)被跟蹤和控制,這對(duì)操作員來(lái)說(shuō)是一個(gè)重大的挑戰(zhàn),因?yàn)檫@要求操作員對(duì)膠囊和超聲系統(tǒng)的動(dòng)力學(xué)和操縱具有良好的了解;以及(2)在B模式圖像中,通過(guò)手動(dòng)從背景組織中識(shí)別設(shè)備和膠囊機(jī)載機(jī)構(gòu)狀態(tài)來(lái)進(jìn)行精確的圖像判讀是特別困難的。研究人員提出了一種自動(dòng)檢測(cè)方法用于幫助臨床醫(yī)生進(jìn)行膠囊操縱,可在無(wú)需超聲醫(yī)師持續(xù)關(guān)注的情況下進(jìn)行膠囊跟蹤,并提供更標(biāo)準(zhǔn)化的反饋。這種自動(dòng)跟蹤將使臨床醫(yī)生通過(guò)解剖工作空間指定的路徑實(shí)現(xiàn)完全閉環(huán)控制。
在本論文中,作者們提出了一種基于注意力的分層深度學(xué)習(xí)方法,并在非醫(yī)學(xué)數(shù)據(jù)集上采用訓(xùn)練有素的CNN模型,以在離體豬胃腸道中使用超聲成像對(duì)毫米級(jí)機(jī)器人膠囊進(jìn)行2D姿態(tài)估計(jì)和機(jī)構(gòu)狀態(tài)檢測(cè)。該膠囊機(jī)器人由封裝在軟彈性體樣品室中的兩個(gè)永磁體構(gòu)成。它具有一個(gè)磁力驅(qū)動(dòng)的取樣機(jī)構(gòu),當(dāng)被施加磁場(chǎng)時(shí),該機(jī)構(gòu)會(huì)使膠囊打開(kāi)以進(jìn)行取樣或治療給藥。膠囊的直徑和長(zhǎng)度分別設(shè)計(jì)為8mm和14.5mm。在臨床使用期間,膠囊在口服給藥后通過(guò)胃腸道,并在移動(dòng)期間保持關(guān)閉,只有在到達(dá)目標(biāo)位置時(shí)才被激活以打開(kāi)進(jìn)行取樣或藥物釋放。最后,膠囊可以通過(guò)常規(guī)的糞便通道取回。
他們考慮了膠囊機(jī)器人的三種可能的機(jī)構(gòu)狀態(tài):閉合、打開(kāi)和消失在視場(chǎng)(FOV)中(由于周圍組織引起的離面運(yùn)動(dòng)或閉塞),如圖1b–d所示。膠囊機(jī)器人在超聲圖像坐標(biāo)系U中的2D姿態(tài)定義為(xU,yU,θU),超聲成像平面內(nèi)的質(zhì)心位置和方向如圖1b所示。
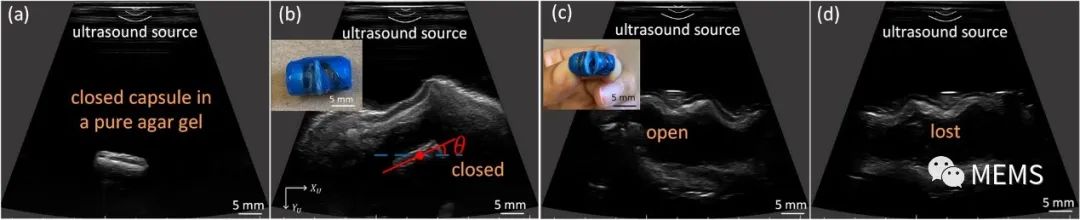
圖1 膠囊機(jī)器人的三種可能的機(jī)構(gòu)狀態(tài)
為了訓(xùn)練神經(jīng)網(wǎng)絡(luò),他們?cè)陔x體豬胃內(nèi)生成了機(jī)器人膠囊的代表性數(shù)據(jù)集。實(shí)驗(yàn)結(jié)果表明,在測(cè)試集上,膠囊狀態(tài)分類的準(zhǔn)確率為97%,方位和質(zhì)心位置的平均估計(jì)誤差為2.0°和0.24mm(膠囊體長(zhǎng)的1.7%)。在豬胃和結(jié)腸中通過(guò)外部磁體操縱膠囊機(jī)器人時(shí),對(duì)膠囊的精確檢測(cè)也得到了證實(shí)。結(jié)果表明,通過(guò)在臨床場(chǎng)景中提供膠囊機(jī)器人的精確檢測(cè),提出的方法有望推進(jìn)無(wú)線膠囊機(jī)器人技術(shù)的發(fā)展。
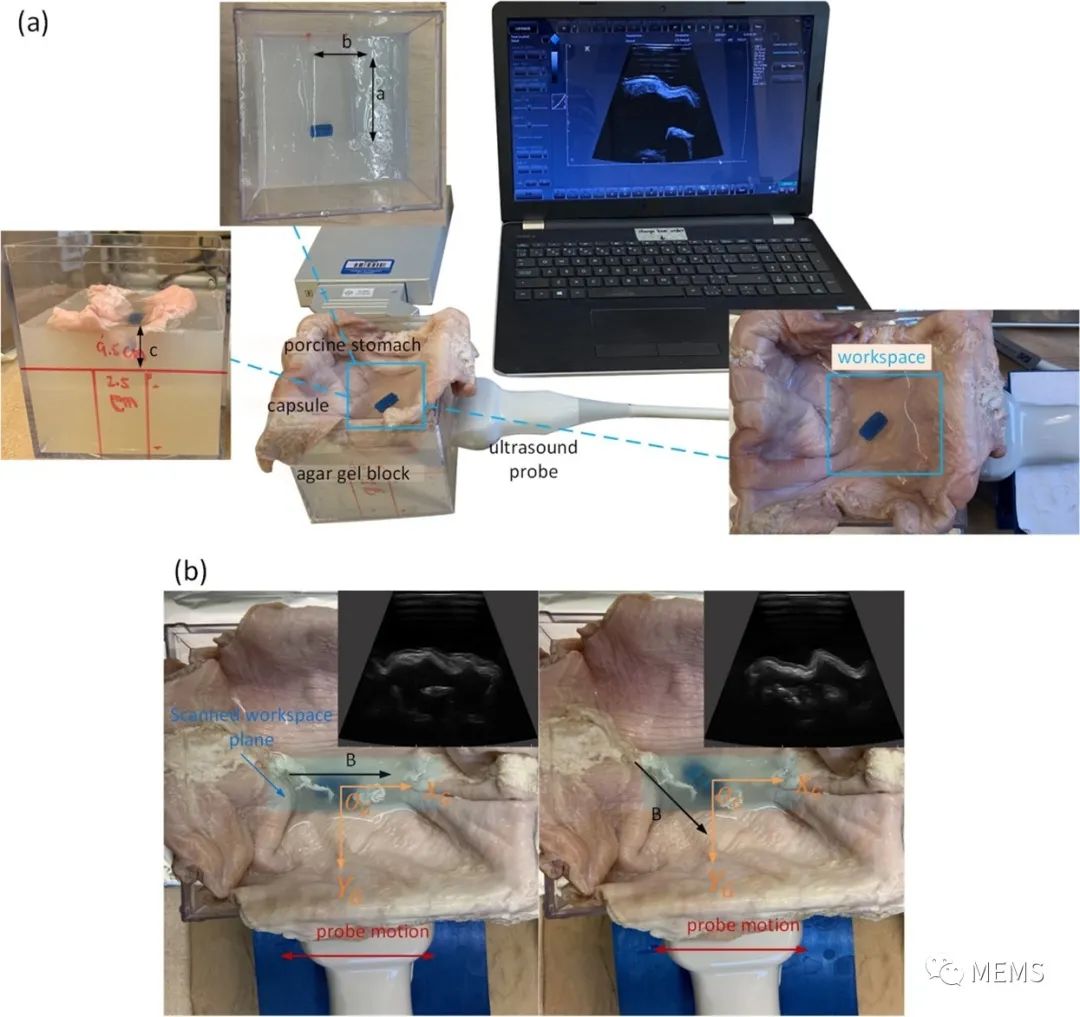
圖2 離體豬胃實(shí)驗(yàn)設(shè)置
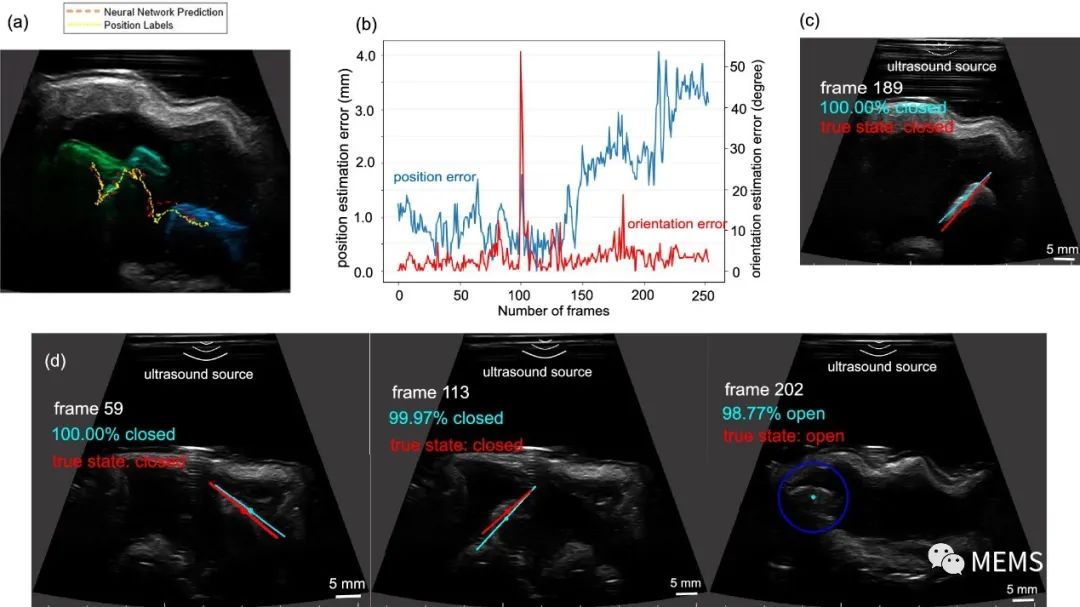
圖3 膠囊機(jī)器人的離體姿態(tài)估計(jì)和機(jī)構(gòu)狀態(tài)檢測(cè)結(jié)果
本論文研究工作的主要貢獻(xiàn)包括:
(1)這項(xiàng)研究工作演示了在離體豬胃腸道超聲B模式成像下對(duì)無(wú)線膠囊機(jī)器人的姿態(tài)和運(yùn)行狀態(tài)的檢測(cè)。這允許將超聲引導(dǎo)的臨床手術(shù)整合到常規(guī)工作流程中,以協(xié)助臨床醫(yī)生使用膠囊機(jī)器人。
(2)這項(xiàng)研究工作提出了一種新的基于注意力的分層深度學(xué)習(xí)方法,以增強(qiáng)特征表示能力,并首次將在非醫(yī)學(xué)數(shù)據(jù)集上預(yù)訓(xùn)練的CNN模型應(yīng)用于目標(biāo)跟蹤任務(wù)的臨床數(shù)據(jù)集。基于離體超聲圖像開(kāi)發(fā)的訓(xùn)練模型具有很大的臨床價(jià)值,可以作為超聲引導(dǎo)的醫(yī)療器械在體內(nèi)跟蹤的預(yù)訓(xùn)練模型。
(3)這項(xiàng)研究工作提供了一個(gè)在離體臨床相關(guān)環(huán)境中的超聲圖像的大型標(biāo)記數(shù)據(jù)集,用于對(duì)微尺度膠囊機(jī)器人跟蹤算法的開(kāi)發(fā)進(jìn)行基準(zhǔn)測(cè)試。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2548文章
50681瀏覽量
752020 -
磁共振成像
+關(guān)注
關(guān)注
0文章
20瀏覽量
8588 -
執(zhí)行器
+關(guān)注
關(guān)注
5文章
375瀏覽量
19323
原文標(biāo)題:基于注意力的分層深度學(xué)習(xí)方法,用于膠囊機(jī)器人姿態(tài)和機(jī)構(gòu)狀態(tài)的超聲成像檢測(cè)
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【開(kāi)源項(xiàng)目】你準(zhǔn)備好DIY一款功能強(qiáng)大的機(jī)器人了嗎?
機(jī)器人視覺(jué)技術(shù)中常見(jiàn)的圖像分割方法
機(jī)器人視覺(jué)技術(shù)中圖像分割方法有哪些
編碼器在機(jī)器人系統(tǒng)中的應(yīng)用
基于FPGA EtherCAT的六自由度機(jī)器人視覺(jué)伺服控制設(shè)計(jì)
介紹一種使用2D材料進(jìn)行3D集成的新方法
一種用于2D/3D圖像處理算法的指令集架構(gòu)以及對(duì)應(yīng)的算法部署方法
【愛(ài)芯派 Pro 開(kāi)發(fā)板試用體驗(yàn)】人體姿態(tài)估計(jì)模型部署前期準(zhǔn)備
子母式微納米機(jī)器人系統(tǒng),用于顱內(nèi)跨尺度靶向給藥

LabVIEW的六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
2D與3D視覺(jué)技術(shù)的比較
一個(gè)用于6D姿態(tài)估計(jì)和跟蹤的統(tǒng)一基礎(chǔ)模型

大有可為!泰科協(xié)作機(jī)器人全面布局醫(yī)療健康行業(yè)
使用Python從2D圖像進(jìn)行3D重建過(guò)程詳解

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論