 STM32之紅外遙控信號自學習實現
STM32之紅外遙控信號自學習實現
1 序言
很早前就想實現這個紅外遙控自學習的這個實驗,用于來自己控制房子里如空調等紅外遙控設備的自動化,NEC的標準到具體的產品上可能就被廠家定義為不一樣了,所以自學習就應該是接收到什么就發送什么,不用管內容是什么!
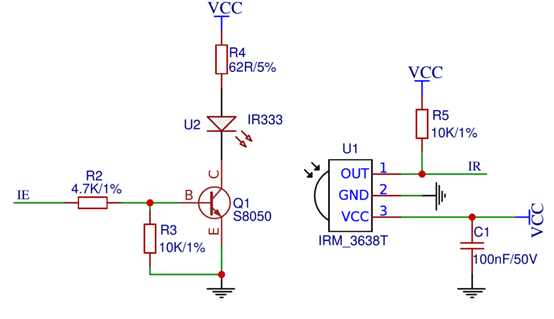
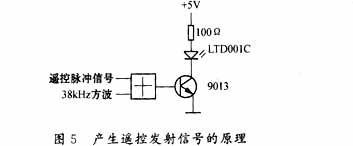
2 硬件實現原理
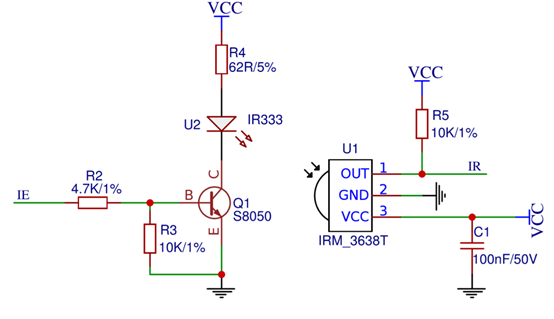
由上述原理圖可知,當IE為高電平時發送紅外光,為低電平時不發送紅外光。
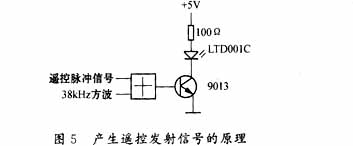
在NEC協議中,信息傳輸是基于38K載波,也就是說紅外線是以載波的方式傳遞。
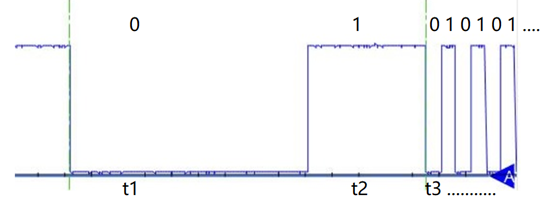
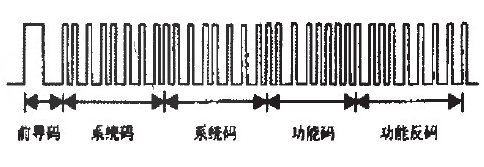
發送波形如下圖所示:
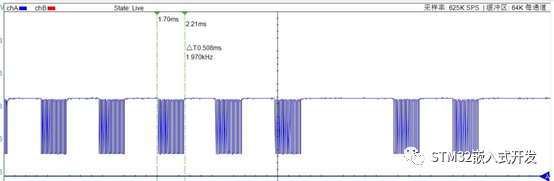
NEC協議規定:
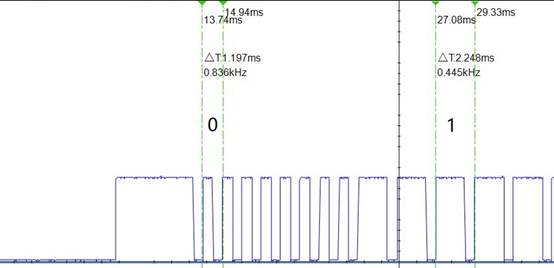
發送協議數據“0” = 發送載波560us + 不發送載波560us
發送協議數據“1” = 發送載波560us+ 不發送載波1680us
發送引導碼 = 發送載波9000us + 不發送載波4500us
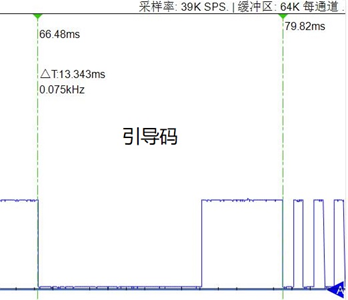
在紅外接收端,如果接收到紅外38K載波,則IR輸出為低電平,如果不是載波包括固定低電平和固定高電平則輸出高電平。在IR端接收的信號如下所示:
3 軟件實現自學習
設計原理:
1、 根據接收波形記錄電平和電平持續時間,以便于發送。
2、電平記錄采用定時器捕獲功能,從下降沿接收引導信號開始,每觸發一次改變觸發方式,從而使每個電平變化都能捕獲到。
源碼實現如下:
定時器捕獲初始化設置(CubeMax軟件自動配置生成):
void MX_TIM4_Init(void) { TIM_ClockConfigTypeDef sClockSourceConfig = {0}; TIM_MasterConfigTypeDef sMasterConfig = {0}; TIM_IC_InitTypeDef sConfigIC = {0}; htim4.Instance = TIM4; htim4.Init.Prescaler = 71; htim4.Init.CounterMode = TIM_COUNTERMODE_UP; htim4.Init.Period = 10000; htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim4) != HAL_OK) { Error_Handler(); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK) { Error_Handler(); } if (HAL_TIM_IC_Init(&htim4) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING; sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI; sConfigIC.ICPrescaler = TIM_ICPSC_DIV1; sConfigIC.ICFilter = 0; if (HAL_TIM_IC_ConfigChannel(&htim4, &sConfigIC, TIM_CHANNEL_4) != HAL_OK) { Error_Handler(); } }
定時器捕獲中斷回調處理:
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) { if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_4) { if(TIM4->CCER & (TIM_CCER_CC4P)) //下降沿觸發 { TIM4->CCER &= ~(TIM_CCER_CC4P); //切換 gu8BitVal = 1; } else //上升沿觸發 { TIM4->CCER |= TIM_CCER_CC4P; //切換 gu8BitVal = 0; } if(gsInfrared.State == NONE_STATE) { gsInfrared.State = RECV_STATE; } else if(gsInfrared.State == RECV_STATE) { NowTimCnt = HAL_TIM_ReadCapturedValue(&htim4, TIM_CHANNEL_4); gsInfrared.KeepTime[gsInfrared.SampleCount] = Round(NowTimCnt); gsInfrared.BitValue[gsInfrared.SampleCount ++] = gu8BitVal; } TIM4->CNT = 0; } }
3、設置的定時器溢出時間為10ms,如果10毫秒內不再接收電平變化則默認接收結束,設置結束標志。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim4)
{
if(gsInfrared.State == RECV_STATE)
{
gsInfrared.State = END_STATE;
}
}
}
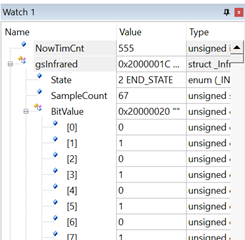
至此,實現了紅外遙控的學習功能,獲得的記錄數據為記錄長度和電平信號數組與電平信號維持的時間數組。
4、發送實現
設置定時器輸出38KPWM信號,在記錄電平為0是輸出記錄時間的38K載波信號,如果為1則不輸出載波,實現如下:
PWM生成設置(CubeMax自動配置生成):
void MX_TIM5_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim5.Instance = TIM5;
htim5.Init.Prescaler = 0;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 1896;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim5.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim5, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim5);
}
發送實現,注意點就是記錄為0時發載波,記錄為1時不發載波:
void InfraredSend(void)
{
uint16_t Count = 0;
while(Count < gsInfrared.SampleCount && gsInfrared.State == END_STATE)
{
if(gsInfrared.BitValue[Count] == 0)
{
TIM5->CCR2 = 948;
delay_us(gsInfrared.KeepTime[Count]);
TIM5->CCR2 = 0;
}
else
{
TIM5->CCR2 = 0;
delay_us(gsInfrared.KeepTime[Count]);
TIM5->CCR2 = 0;
}
Count ++;
}
delay_us(20000);
}
往PWM比較寄存器設置948即為設置38KPWM波,也可在初始化時固定948,在此函數內啟停定時器即可;
至此,自學習功能的全部思路已實現,通過對各個不同類型的紅外遙控進行功能測試,均成功。
PS:查看很多資料發現很多紅外解碼未判斷低電平時間,個人感覺不是很好,應該是不僅高電平時間得符合,低電平時間也應該符合。
自己寫了一個小函數驗證了一下,這個函數只是驗證,未經仔細推敲,還可優化,僅供參考這一思想。
誤差設計:±200us(拍腦袋值)
void InFraredDataDeal(void)
{
uint32_t DataBuff = 0;
uint16_t Count = 0;
if(gsInfrared.State == END_STATE)
{
gsInfraredData.State = 0;
do
{
switch(gsInfraredData.State)
{
case 0: //引導碼識別
{
if(gsInfrared.KeepTime[0] >= 8800 && gsInfrared.KeepTime[0] <= 9200 && gsInfrared.BitValue[0] == 0)
{
if(gsInfrared.KeepTime[1] >= 4300 && gsInfrared.KeepTime[1] <= 4700 && gsInfrared.BitValue[1] == 1)
{
if(gsInfrared.KeepTime[2] >= 360 && gsInfrared.KeepTime[2] <= 760 && gsInfrared.BitValue[2] == 0)
{
Count = 3;
gsInfraredData.State = 1;
}
}
else if(gsInfrared.KeepTime[1] >= 2300 && gsInfrared.KeepTime[1] <= 2700 && gsInfrared.BitValue[1] == 1)
{
if(gsInfrared.KeepTime[2] >= 360 && gsInfrared.KeepTime[2] <= 760 && gsInfrared.BitValue[2] == 0)
{
gsInfraredData.ReDataCount ++;
gsInfraredData.State = 3;
}
}
else
{
gsInfraredData.State = 3;
}
}
else
{
gsInfraredData.State = 3;
}
}
break;
case 1: //數據解析
{
if(gsInfrared.KeepTime[Count + 1] >= 360 && gsInfrared.KeepTime[Count + 1] <= 760 && gsInfrared.BitValue[Count + 1] == 0)
{
if(gsInfrared.BitValue[Count] == 1)
{
if(gsInfrared.KeepTime[Count] >= 1480 && gsInfrared.KeepTime[Count] <= 1880)
{
DataBuff <<= 1;
DataBuff |= 1;
}
else if(gsInfrared.KeepTime[Count] >= 360 && gsInfrared.KeepTime[Count] <= 760 && gsInfrared.BitValue[Count] == 1)
{
DataBuff <<= 1;
DataBuff |= 0;
}
else
{
gsInfraredData.State = 3;
}
}
}
if(Count < gsInfrared.SampleCount)
{
Count += 2;
}
else
{
gsInfraredData.State = 2;
}
}
break;
case 2: //成功解析
{
gsInfraredData.Data = DataBuff;
gsInfraredData.State = 3;
}
break;
default:
{
gsInfraredData.State = 3; //解析結束
}
break;
}
}
while(gsInfraredData.State != 3);
gsInfrared.State = NONE_STATE;
gsInfrared.SampleCount = 0;
}
}
解析的話一般高位在前,所以左移,經測試幀格式為:引導碼+用戶碼+用戶碼反碼+命令碼+命令碼反碼,能成功解析數據!解析的話根據具體協議,具體分析。
審核編輯:湯梓紅
-
NEC
+關注
關注
0文章
238瀏覽量
99004 -
STM32
+關注
關注
2257文章
10822瀏覽量
352419 -
信號
+關注
關注
11文章
2738瀏覽量
76163 -
定時器
+關注
關注
23文章
3218瀏覽量
113663 -
紅外遙控
+關注
關注
22文章
347瀏覽量
45392
原文標題:STM32之紅外遙控信號自學習實現
文章出處:【微信號:單片機與嵌入式,微信公眾號:單片機與嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自學習空調控制器
如何讓電機自學習?
自學習差異進化算法
基于ESP8266智能家居自學習紅外遙控設計 單片機源代碼+PCB電路圖






 工商網監
工商網監
評論