") 故障管理架構(gòu)
故障管理架構(gòu)
我最近對使用 PMBus 通信來管理故障與內(nèi)置故障管理進行了一些詢問。問題是雙重的:使用 PMBus 做出故障決策有什么影響,以及可以做些什么來構(gòu)建系統(tǒng)范圍的故障日志?
在我深入研究PMBus的這兩種用途之前,讓我們考慮一下PMBus規(guī)范中的內(nèi)容以及PMBus創(chuàng)建者的意圖。PMBus 規(guī)范包括各個設(shè)備的警告、故障和響應(yīng):
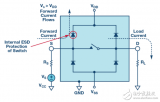
有兩種方法可以傳達故障信息:警報響應(yīng)地址 (ARA) 和主機通知協(xié)議 (HNP)。ARA 從斷言 ALERTB 開始中斷電路板控制器,該控制器使用 PMBus 地址查詢進行響應(yīng),以列出斷言 ALERTB 的所有設(shè)備。HNP由設(shè)備啟動,成為PMBus主站,并將STATUS_WORD直接發(fā)送到電路板控制器。實際上,設(shè)備首先響應(yīng),然后通知電路板控制器。這通過確保對故障的最快響應(yīng)來保護設(shè)備和負載,主要是停止電力傳輸。
PMBus尚未解決另外兩個關(guān)注領(lǐng)域:
設(shè)備之間的交互。
故障日志
這兩個問題都被故意忽略了,因為PMBus委員會認為這些功能最好留給供應(yīng)商創(chuàng)新。
當然,有不同的方法可以處理這些功能:使用 PMBus 和電路板控制器,或使用內(nèi)置功能。這或多或少是調(diào)查的基礎(chǔ)。
讓我們開始吧...
我使用基于多線程 RTOS 的電路板控制器參考設(shè)計構(gòu)建了一個原型。這給了我實際的結(jié)果,而不是在實踐中可能無法實現(xiàn)的最佳情況計算。
對于硬件,我使用了帶有偽靜態(tài)Ram(PSRAM)和鐵氧體Ram(FRAM)的飛思卡爾Kinetis K60。PSRAM是一個方便的問題:我已經(jīng)有了驅(qū)動程序。使用FRAM是因為它具有數(shù)據(jù)由其寫入事務(wù)的最后一個時鐘提交的屬性,它不需要在塊中寫入,并且磨損前的程序周期數(shù)非常大。對于 PMBus 器件,我使用了 LTC3880、LTC2974 和 LTC2977。我在 V 上放了一個當前的負載箱出0的 LTC3880 導(dǎo)致故障。
遙測在其自己的線程中運行,錯誤處理在另一個線程中運行,并且有一些實用程序線程的優(yōu)先級較低。
該應(yīng)用程序大致如下:
警報/從過電流斷言
執(zhí)行 ARA 以獲取地址
讀取STATUS_WORD
制定并執(zhí)行斷電決策
STATUS_WORD存儲在 FRAM 中
從所有 13 個電源軌讀取輸出電流
輸出電流存儲在 FRAM 中
設(shè)置了重試計時器
執(zhí)行重試
這是一個近似值,因為如果多個電源軌同時發(fā)生故障,則更多狀態(tài)將存儲在 FRAM 中。這是很常見的,因為過電流會導(dǎo)致欠壓,并且電源軌可能會相互作用。
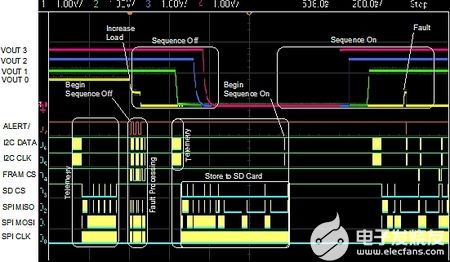
此范圍捕獲顯示結(jié)果。您可以看到 I2C 總線上的遙測對所有 13 個電源軌大約需要 40 毫秒,結(jié)果在 200 毫秒內(nèi)存儲在 SD 卡上。但后來的遙測需要 300 毫秒。 (查看“存儲到 SD 卡”) 這就是為什么 SD 卡適用于遙測但不適用于故障日志的原因。原因很復(fù)雜,但請記住,SD卡具有FAT文件系統(tǒng),因此操作次數(shù)包括讀取目錄結(jié)構(gòu)等。
您可以在 ALERT/ 引腳上看到多個斷言,總故障處理時間約為 50 毫秒。此時需要執(zhí)行多個 ARA,從多個電源軌讀取狀態(tài),收集一些輸出電流讀數(shù),并存儲到 FRAM。該故障觸發(fā)序列關(guān)閉,需要超過400ms。最終會重試。
有一些好消息和壞消息。好消息是,具有多個故障的13個軌道系統(tǒng)日志可以在50ms內(nèi)存儲故障數(shù)據(jù)。這接近最壞情況的數(shù)字。典型故障可以在不到 10 毫秒的時間內(nèi)收集和存儲數(shù)據(jù)。如果您仔細查看重試中的故障,您可以看到幾個 FRAM 事務(wù),因為執(zhí)行 ARA 的速度非常快。在這種情況下,原始故障在幾毫秒內(nèi)被捕獲。
但現(xiàn)在壞消息是:關(guān)閉軌道所需的時間是數(shù)百毫秒。好的,我知道,這不是真實系統(tǒng)的典型特征。我只是想讓你看看,如果你不考慮你的PMBus故障響應(yīng)是如何編碼的,你關(guān)閉電源的速度有多慢。
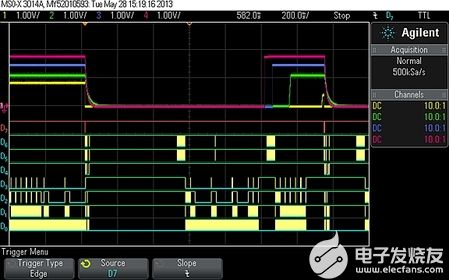
通過切換到立即關(guān)閉,請注意電源軌關(guān)閉的速度有多快。讓我們放大一點:
立即關(guān)閉時,需要 2.5 毫秒才能斷電。時間是讀取狀態(tài)寄存器、與遙測共享總線以及脫離軌道命令的組合。因此,這個數(shù)字會四處移動,有時會很快,有時會很慢。最好的情況是 ARA 后跟狀態(tài)讀取,然后是全局關(guān)閉命令。即讀取字節(jié)(3 個字節(jié))、讀取狀態(tài)字(5 個字節(jié))、全局關(guān)閉(6 個字節(jié))。在 400kHz 時,即 375us。但這不包括任何驅(qū)動程序開銷。注意:三個電源軌的斜坡下降非常慢,因為它們只有幾毫安的負載。您可以快速殺死電源,但您需要負載將其拉到地面。但這是另一個話題。這要好得多,但我們能做得更好嗎?當然:如果使用設(shè)備的內(nèi)置故障管理。讓我們看看這能做什么。

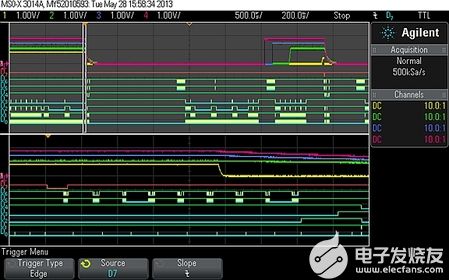
軌道在30us內(nèi)關(guān)閉,在不到100us內(nèi)下降到地面。這是一個非常輕載的軌道:小于1A。如果我使用 20A 負載,它會關(guān)閉得更快。這種短暫的延遲不必與其他活動競爭:它只是一個比較因素。您的代碼可以隨心所欲地執(zhí)行,而不會影響此內(nèi)置錯誤響應(yīng)。那么有什么收獲呢?使用 PMBus 進行遙測和系統(tǒng)范圍的故障日志記錄是有意義的。您可以收集系統(tǒng)范圍的數(shù)據(jù),并足夠快地將其放入非易失性存儲器中。這可以增加大多數(shù)設(shè)備中內(nèi)置故障日志記錄的價值。通常,內(nèi)置日志將包含有關(guān)原始故障源的更多詳細信息和更好的信息。外部記錄器將具有有關(guān)整個系統(tǒng)的全局時間戳信息。使用這兩個日志,您有最好的診斷機會。但是,使用串行總線保護負載不是一個好主意。400Khz串行總線的理論最佳情況比內(nèi)置解決方案慢10倍。讓我們換個角度看這個問題。假設(shè)串行總線必須在30uS內(nèi)關(guān)閉電源軌,那么它的時鐘必須有多快?使用 14 字節(jié)的理想情況,等于 112 位。為中斷延遲和/或決策邏輯增加一點時間,約為 4Mhz。現(xiàn)在考慮一下如果總線上有 10 個設(shè)備同時出現(xiàn)故障會發(fā)生什么。這需要40Mhz。現(xiàn)在建立一個100鐵路系統(tǒng)...在負載保護和故障記錄這兩種情況下,PMBus 在功能上都能夠制定響應(yīng)。但在日志的情況下,最好作為內(nèi)置日志的增強,而在負載保護的情況下,最好利用設(shè)備共享故障信息的能力。這正是最初的PMBus委員會的意圖。創(chuàng)建一個共享標準,解決常見問題,同時支持創(chuàng)新。
審核編輯:郭婷
-
控制器
+關(guān)注
關(guān)注
112文章
16203瀏覽量
177413 -
電路板
+關(guān)注
關(guān)注
140文章
4907瀏覽量
97422 -
PMBus
+關(guān)注
關(guān)注
3文章
100瀏覽量
30202
發(fā)布評論請先 登錄
相關(guān)推薦
Linux內(nèi)核內(nèi)存管理架構(gòu)解析

VisualNet管理平臺的架構(gòu)方式
數(shù)字電源管理架構(gòu)的探討
數(shù)字電源管理的幾種主要架構(gòu)
電池管理系統(tǒng)的硬件架構(gòu)
Linux電源管理的系統(tǒng)架構(gòu)和驅(qū)動
ARM領(lǐng)域管理擴展(RME)系統(tǒng)架構(gòu)介紹
飛機故障信息控制管理系統(tǒng)的設(shè)計與實現(xiàn)
如何擴展與管理虛擬架構(gòu)
新型故障保護開關(guān)架構(gòu)
云基礎(chǔ)架構(gòu)及管理
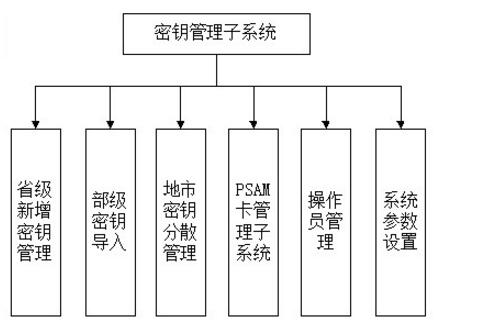
密鑰管理系統(tǒng)概述_密鑰管理系統(tǒng)架構(gòu)圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論