") 一個關于三相Vienna拓撲技術知識(上)
一個關于三相Vienna拓撲技術知識(上)
一. 序言
最近這幾年充電模塊是熱門,從最開始的7.5 kW、10 kW到后面的15 kW、20 kW,功率等級不斷的提高。現(xiàn)在市場上的大功率充電模塊絕大部分都是三相輸入,PFC部分也基本都是采用的三相無中線Vienna結構的拓撲。結合Microchip的MCU和功率半導體,和大家分享一下。由于本人水平有限,也難免會有一些個人見解有誤的地方,希望和大家一起探討交流。
二. 主電路的組成
-
主拓撲
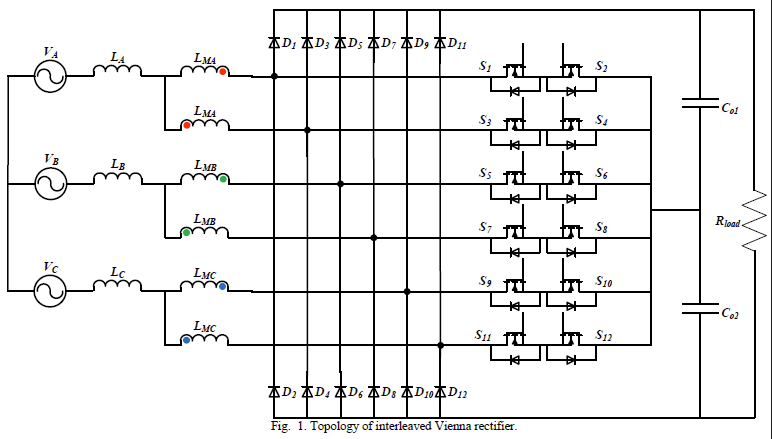
如圖1所示,主拓撲是三相Vienna PFC拓撲的主電路:

圖1 三相三電平Vienna主拓撲結構
-
三相二極管整流橋,使用超快恢復二極管或SiC二極管; -
每相一個雙向開關,每個雙向開關由兩個MOS管組成,利用了其固有的反并聯(lián)體二極管,共用驅(qū)動信號,降低了控制和驅(qū)動的難度。相比其他組合方案,具有效率高、器件數(shù)量少的有點; -
電流流過的半導體數(shù)量最少:以a相為例,雙向開關Sa導通時,電流流過2個半導體器件,euo = 0,橋臂中點被嵌位到PFC母線電容中點;雙向開關關斷時,電流流過1個二極管,iu > 0時euo = 400V, iu < 0時euo = -400V,橋臂中點被嵌位到PFC正母線或負母線。

圖2 單相電流路徑
電路的工作方式靠控制Sa、Sb、Sc的通斷,來控制PFC電感的充放電,由于PFC的PF值接近1,在分析其工作原理時可以認為電感電流和輸入電壓同相,三相電平衡,并且各相差120度。
-
等效電路 -
三相三電平Boost整流器可以被認為是三個單相倍壓Boost整流器的Y型并聯(lián); -
三個高頻Boost電感,采用CCM模式,減少開關電流應力和EMI噪聲; -
兩個電解電容構成電容中點,提供了三電平運行的條件;

圖3 單相整流電路

圖4 主電路等效電路
根據(jù)等效電路,各參數(shù)表達式如下:

注: 這個eun的表達式非常重要,是后面很多公式計算的基礎,推導如下。
將如圖1所示的主電路進行等效:

圖5 電路等效圖
列出電路的平衡方程,其中三相平衡下:

在任意時刻:

化簡得到:

因此:

其中Vuo,Vvo,Vwo,是三相端點A、B和C的電壓, L = La= Lb= Lc。
三. 工作原理
-
主電路的開關狀態(tài)
三相交流電壓波形如圖6所示,U.V.W各相差120度

圖6 三相交流電壓波形
通過主電路可以看出,當每相的開關Sa、Sb、Sc導通時,U、V、W連接到電容的中點O,電感La、Lb、Lc通過Sa、Sb、Sc充電,每相的開關關斷時,U、V、W連接到電容的正電平(電流為正時)后者負電平(電流為負時),電感通過D1-D6放電,以0~30度為例,ia、ic大于零,ib小于零。
每個橋臂中點有三種狀態(tài),三個橋臂就是3^3=27種狀態(tài),但不能同時為PPP和NNN狀態(tài),故共有25種開關狀態(tài);開關狀態(tài)見附件!

-
主電路發(fā)波方式
主電路的工作狀態(tài)與發(fā)波方案有比較大的關系,采用不同的發(fā)波方案會在每個周期產(chǎn)生不同的工作狀態(tài)。一般Vienna拓撲采用DSP數(shù)字控制,控制靈活,可移植性強。
(1)采用單路鋸齒波載波調(diào)制電流環(huán)控制器輸出的調(diào)制信號被饋送給鋸齒波載波,如圖7所示,保持恒定的開關頻率;在0~30度這個扇區(qū)內(nèi),每個周期產(chǎn)生4個開關狀態(tài),由于波形不對稱,電流波形的開關紋波的諧波比較大;采用該種方式進行調(diào)試,橋臂中點線電壓的最大步進是2Ed(Ed為母線電壓的一半,400V);

圖7 鋸齒波載波方式
(2)采用相位相差180度的高頻三角載波,如圖8所示,當對應的輸入電壓是正半周的時候,采用Trg1,當對應的輸入電壓是負半周的時候采用Trg2,每個周期產(chǎn)生8個開關狀態(tài),與傳統(tǒng)的控制方案產(chǎn)生4個開關狀態(tài)相比,8個開關狀態(tài)相當于頻率翻倍,減小了輸入電流的紋波,對THD指標有好處;

圖8 三角波載波方式
三角波載波方式仿真波形如圖9所示:

圖9 三角波載波方式仿真波形
-
工作狀態(tài)
上面我們提到,三相三電平PFC可以看作是三個單相的PFC,每個單相相當于由兩個Boost電路組成,在交流電壓的正負半周交替工作,正半周如下所示:

圖10 單相ON-OFF電流波形
以a相為例,驅(qū)動信號為高時,則開關管Q1導通(交流電壓的正半周)或者Q2導通(交流電壓的負半周);驅(qū)動信號為低時,開關管Q1和Q2都關斷。電壓正半周時,a相上橋臂二極管導通;電壓負半周時,a相下橋臂二極管導通。
通過上面的分析,采用移相180度的三角載波進行調(diào)制,在0~30度的扇區(qū)內(nèi)有8種開關狀態(tài),4種工作模式ONO,ONP,OOP,POP。
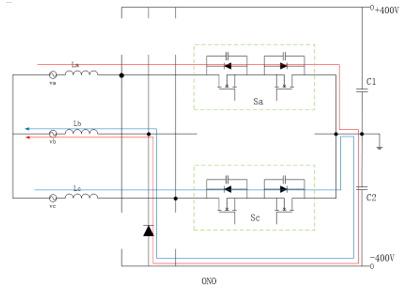
ONO工作模式:a相和c相導通,b相截至,U和W電壓為0,V點電壓-400V;該工作狀態(tài)只給C2進行充電;

圖11 ONO開關狀態(tài)
ONP工作模式:a相導通,b相和c相截至;U點電壓為0,V點電壓為-400V,W點電壓為+400V;

圖12 ONP開關狀態(tài)
OOP工作模式:U和V點電壓為0,W點電壓為+400V;

圖13 OOP開關狀態(tài)
POP工作模式:U和W點電壓為+400V,V點電壓為0,該工作模式只給C1進行充電;

圖14 POP開關狀態(tài)
當然,這只是在0~30度扇區(qū)的工作狀態(tài),其實在整個工頻周期,是有25個工作狀態(tài)的,具體見我上面發(fā)的開關狀態(tài)附件。ONO和POP這兩種工作模式只給C1或C2充電的狀態(tài)對后面母線電壓均壓起決定性的作用。
四.器件應力的分析
-
PFC電感應力
從上面的工作狀態(tài),我們可以知道,PFC電感的前端接輸入,后端電壓在開關不同的狀態(tài)分別接PFC電容三個電位,P,O,N,我們以輸入的三相中點為基準, PFC母線電壓是波動的,三個狀態(tài)的電壓分別為:

其中Vu,Vv,Vw為三相開關端點相對母線電容中點的電壓,以A相為例,當Va>0時,Vu可以取0,400V,而其余B,C相可以取除(400V,400V)以外的任意向量,因B,C相不可能同時為正,所以此時PFC電感右端的電壓范圍-266~533V。
同理當Va<0時Vu可以取0,-400V,而其余B,C相可以取除(-400V,-400V)以外的任意向量,所以此時PFC電感右端的電壓范圍-533~266V。電感兩端的電壓峰值出現(xiàn)在該相60度時(大于60度后其余兩相為負,GND到O的電壓最大值變成了133V,所以從仿真上可以看出峰值電壓的跌落,最大值為:

-
MOSFET和二極管應力
如圖1所示,每相的兩個二極管跨接在正負母線之間,其中點的電平可以為0,-400V,400V,所以對于二極管,其兩端承受的最大平臺電壓為輸出PFC輸出電壓,800V母線電壓考慮MOS開關帶來的電壓尖峰,二極管的最大尖峰電壓會接近1000V,其電流應力可以通過控制方程計算出來。
其實考慮整流二極管不僅要考慮耐壓、通流能力,還有一個很重要的參數(shù)是抗浪涌沖擊的能力。在實際調(diào)試的過程中,有嘗試選擇用SiC二極管,但是SiC二極管的抗浪涌沖擊電流的能力比較弱,所以一般都是采用超快恢復的高壓二極管,比如Microsemi的ATP30DQ1200B系列。
我們知道,當模塊在打浪涌的時候,電流都是走低阻抗的路徑,一般前級的壓敏電阻會泄流一部分電流,但是壓敏電阻不會泄放所有的電流,依然會有大量的電流留到后級電流中。對于單相模塊,一般的做法是在PFC電感前面增加一個二極管到PFC母線電容,這樣,浪涌電流就會通過防雷二極管引入到PFC母線電容,保護了功率器件。但是對于三相PFC而言,PFC電容是一個五電平的波動,無法采用這種方法。否則,電路正常工作時就會有電流流過該二極管而導致Vienna無法工作。所以,大電流會通過電感、PFC Diode進入母線電容,這個時候就要求PFC Diode抗浪涌電流的能力比較強。
MOSFET的VDS電壓,由于采用三電平技術,使MOSFET電壓只有三相PFC 800V母線電壓的一半,考慮尖峰,這個電壓會接近600V。對于MOS電壓應力我們 最關心的是對頂MOS的中點相對三相輸入的參考地的電位差 ,如果采用隔離光耦進行驅(qū)動,這個電壓決定隔離驅(qū)動光耦的選型。
五.控制方案
我們知道,這種控制電路一般采取雙環(huán)的控制方式,即電壓外環(huán)+電流內(nèi)環(huán)。電壓外環(huán)得到穩(wěn)定的輸出直流電壓,供后級電路的使用(比如Three Level LLC、PS Interleave LLC、PSFB 等),電流內(nèi)環(huán)得到接近正弦的輸入電流,滿足THD和PF值的要求。

圖15 控制環(huán)路
其實數(shù)字控制無非就是把模擬的方案轉換為數(shù)字的運算,可以參考如圖16所示模擬PFC控制邏輯框圖,利用它的控制思想來實現(xiàn)數(shù)字化。

圖16 模擬控制框圖
PFC母線輸出電壓經(jīng)過采樣和濾波由DSP的ADC采樣到DSP內(nèi)部,與電壓給定信號進行比較,產(chǎn)生誤差后經(jīng)過Gvc(s)補償起后輸出一個A信號,然后通過乘法器與交流AC電壓相乘得到電流的給定信號,正是該乘法器的作用才能保證輸入電壓電流同相位,使電源輸入端的PF值接近1;將采樣的電感電流波形與電流給定進行比較得出誤差,經(jīng)過Gic(s)補償器進行補償后得到電流環(huán)的輸出值,該值直接與載波進行調(diào)制,得到PWM波形,控制電壓和電流;大致的控制框圖可以用下圖來簡化表示,如圖17所示;

圖17 PFC傳遞函數(shù)框圖
其中:Gcv(s)為電壓環(huán)的補償函數(shù),Gci(s)為電流環(huán)的補償函數(shù),Hi(s)為電流環(huán)采樣函數(shù),Hv(s)為電壓環(huán)采樣函數(shù),Gigd(s)為電感電流對占空比D的函數(shù)。
六.控制地的選擇
在傳統(tǒng)的單相有橋PFC中,一般把PFC電容的負極作為控制AGND,因為該點的電壓通過整流橋跟輸入的L、N相連。當輸入為正半周的時候,AGND為整流橋鉗位在N線;當輸入負半周的時候,AGND被整流橋鉗位在L線;所以母線電容的負極地AGND(相當于PE)是一個工頻的變化,由于輸入一般都是50Hz的交流電,所以相對還是比較穩(wěn)定的,可以作為控制電路的控制地。
但是相比較Vienna PFC就不一樣了,母線電容的中點相對與工頻電壓中點(PE)是一個開關級的5電平高頻變動的電平:±2/3Vo、0、±1/3Vo(這里的Vo代表母線電壓的一半,典型值400V,5電平是如何產(chǎn)生的請參考開關狀態(tài)附件的eon),如果以如此大的高頻波動去作為控制地的話,那么噪聲和共模干擾就會非常的大,可能會導致采樣電壓和驅(qū)動不準確,嚴重影響到電路的可靠性。
由于電容中點的高頻變化不能作為控制地,那怎么辦?我們是否可以認為的構建一個虛擬的地來作為控制地AGND?我們可以采用在三相輸入之間通過分壓電阻相連,采用Y型接法來產(chǎn)生虛擬地而作為控制地。不過構建了這個控制地后,那么其他所有的采樣、驅(qū)動都要以差分和隔離的方式相對于這個控制地來工作。采用這種方法,輸出電容中點O與控制地AGND分開了,避免了高頻劇烈變動帶來的干擾。

圖18 控制地AGND
這樣做是不是完美解決了控制地的問題?在實際工作過程中,AGND依然存在劇烈的波動,并不是我們想象的那么平靜,AGND跟隨著O在劇烈的波動,AGND的峰峰值非常的大。
如何解決?其根本原因是AGND 和O之間存在采樣電阻的連接(輸出電壓的采樣),而AGND跟PE之間又存在Y電容連接,在O點的高頻信號作用下,AGND自然就被迫分擔一定比例的電壓。解決方案是在AGND與PE之間增加一個低阻通路來降低阻抗,承擔一定的電壓來降低AGND-PE的紋波電壓。
七.母線均壓原理的分析
我們知道,三相Vienna PFC拓撲的母線電壓800V是由兩個電容C1和C2串聯(lián)進行分壓,電容中點的電位O由電容的充放電決定,兩個電容的電壓應該保持均衡以保持真實的三電平運行條件。否則輸出電壓可能包含不期望的諧波,甚至會影響到電路的完全性。
三相三電平PFC正負母線的均衡度會影響PFC的性能:
1、輸入電流THD;
2、功率開關管和二極管的應力(本身以及后級功率電路);
3、動態(tài)時母線電容容易過壓;
電容中點的電位偏差與PFC正負母線電容的充放電過程相關,通過附件開關狀態(tài)可以看出,a組和z組工作狀態(tài)沒有電流流入或流出電容中點,因此兩個電容的充放電是一樣的,不會產(chǎn)生偏壓。只有b、c、d組的開關狀態(tài)才會影響到PFC母線電容充放電的差異,產(chǎn)生偏壓。
根據(jù)前面的工作原理分析,POP工作狀態(tài)只給電容C1進行充電,ONO工作狀態(tài)只給電容C2進行充電,故可以根據(jù)這兩個工作狀態(tài)來控制中點電位,在控制中可以調(diào)節(jié)ONO和POP兩個工作狀態(tài)的作用時間來進行均壓。

圖19 C2充電

圖20 C1充電
這個時候可以在整個控制環(huán)路中添加一個偏壓環(huán),用于調(diào)節(jié)ONO和POP的作用時間,來進行母線電壓的均壓作用。
具體實施方:是分別對正母線和負母線進行采樣,然后得出差值(直流分量),該差值經(jīng)過偏壓環(huán)的補償器調(diào)節(jié)之后疊加到輸入電流參考正弦波,經(jīng)過精密整流后變換為幅值有差異的雙半波作為電流環(huán)的給定,以此來改變ONO和POP的作用時間,改善PFC母線均壓。

圖21 偏壓給定
如圖22所示,compa、compb和compc分別是每相的電流環(huán)計算出來的結果,以0~30度扇區(qū)為例,當正母線相對于中點的電壓低于負母線時,正半波的給定變小,負半波的給定變大,POP工作狀態(tài)的時間變長,給正母線電容的充電時間變長;ONO工作狀態(tài)的時間變短, 給負母線電容的充電時間變短。當正母線相對于中點的電壓高于負母線時,正半波的給定變大,負半波的給定變小,POP的作用時間變長,給正母線電容充電的時間變短,ONO的作用時間變長,給負母線的充電時間變長。圖中comp值實線代表上個周期的值,虛線代表當周期的值;陰影部分代表變化的時間;

圖22 均壓控制示意圖
以上說明的是主功率回路正常工作時候可以通過調(diào)節(jié)來控制PFC母線電容的均壓,但是當模塊起機的時候呢?可以采用輔助電源直接從+400V~-400V之間進行取電,由于電容有差異性,內(nèi)阻不可能完全相等,也會差生偏壓。還有一個是要采用更高等級的MOSFET,成本高,而且現(xiàn)在充電模塊的待機損耗也是一個問題,很多客戶要求模塊的待機損耗不能超過多少。
當然還有另一種輔助電源取電方式,也是現(xiàn)在廠家主流的方式。就是正負母線均掛一個輔助電源,在起機的時候通過充電電阻給母線電容充電,變壓器采用繞組競爭的方式,誰的母線電壓高,就采用誰供電,這樣可以很好的保證模塊在起機過程中的均壓效果;在模塊正常工作起來以后,也是同樣的道理。而直接從+800V取電沒有這種效果。

圖23 輔助電源示意圖
八.原理仿真
-
輸入電流
輸入電流波形,參數(shù)沒有調(diào)好,將就著看吧。

圖24 輸入電流波形
-
各點電壓波形
輸入線電壓峰值與PFC總母線電壓的比值定義為調(diào)制系數(shù)m,m=Vlp/2Ed;其中Vlp是線電壓的峰值;整流器可以被認為是與市電通過PFC電感連接的電壓源,為了使輸入電流正弦,橋臂中點線電壓也應該為正弦波形。而實際情況下橋臂中點線電壓是正弦 PWM波形,諧波分量和最大步進是兩個主要考慮的因素。
(1)當輸入線電壓峰值值大于Ed時,橋臂中點線電壓電壓波形euv,是一個5階梯的電壓波形,幅值為0,±400V,±800V,步進是400V;

圖25 橋臂中點電壓1
(2)當輸入線電壓峰值值小于Ed時,橋臂中線線電壓波形是一個3階梯的電壓波形,幅值為0,±400V,步進為400V;

圖26 橋臂中點電壓2
橋臂中點相對與市電中點的電壓波形eun,是一個9階梯的電壓波形;幅值為0,±133V,±266V,±400V,最小步進是133V,最大步進是266V;由于功率開關管和散熱器之間有寄生電容,這個階梯信號會產(chǎn)生共模噪聲;

圖27 eun電壓波形
電容中點O相對于市電中點的電壓波形eon,是一個5階梯波形,幅值為0,±133V,±266V,步進為133V;

圖28 eon電壓波形1

圖29 eon電壓波形2

圖30 eon電壓波形3
最后附一張電路起機波形:

圖31 起機波形
九.環(huán)路分析及數(shù)字化
-
工作原理
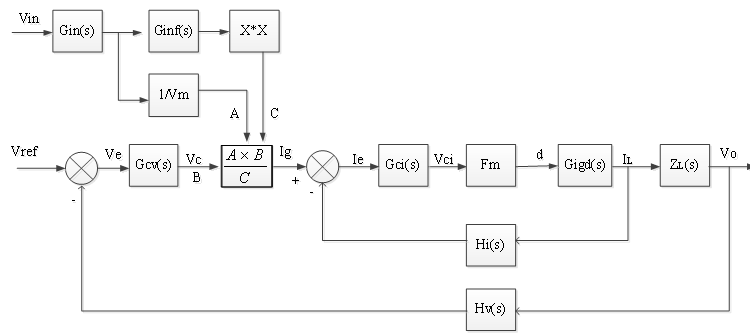
輸入交流電壓和電感電流,以及PFC母線電壓經(jīng)過采樣和濾波由DSP的ADC口采樣到DSP內(nèi),然后通過一個電壓反饋補償器Gcv(S),輸出電壓環(huán)的反饋信號Vc,然后通過一個乘法器單元將電壓調(diào)節(jié)器的輸出Vc與輸入電壓的全波整流波形相乘,得到整流橋后電流的指令值Iref。正是該乘法器保證了輸入電流與輸入電壓同相且波形相同,使電源輸入端的功率功率因數(shù)為1,它是實現(xiàn)功率因數(shù)校正功能的關鍵。在圖1所示的電路中,PFC參考電流合成器還包含了一個輸入電壓全波整流值的平方電路和除法器,主要是為了提高控制系統(tǒng)對輸入電壓變化的動態(tài)響應速度,它對于寬輸入電壓范圍和輸入電壓波動較大的應用場合更為必要,我們將上面的電路框圖用傳遞函數(shù)框圖表示:

圖32 PFC傳遞函數(shù)框圖
其中:Gcv(s)為電壓環(huán)的補償函數(shù),Gci(s)為電流環(huán)補償函數(shù),Vm為載波幅值,Gigd(s)為電感電流對占空比D的函數(shù),ZL(s)為電感電流到輸出電壓的阻抗,Hi(s)為電流環(huán)采樣函數(shù),Hv(s)為電壓環(huán)采樣函數(shù)。
在三相PFC的數(shù)字控制當中,可以采用Microchip雙核dsPIC33CH系列,由于其內(nèi)部具備雙核CPU,所以整個控制我們分配在兩個內(nèi)核中,主核Master完成電壓環(huán)以及保護和快速采樣濾波計算等環(huán)節(jié),從核Slave完成電流環(huán)和發(fā)波的功能。
雙核示意圖如下:

圖33 dsPIC雙核框圖
雙核系列的dsPIC具有如下特點:
-
主核和從核分別獨立工作; -
在應用開發(fā)階段可以分別編程和調(diào)試; -
主核和從核都有它們自己的中斷控制、時鐘發(fā)生器、端口邏輯和外設資源; -
主核最大工作90MIPS,從核最大工作100MIPS; -
PFC電流環(huán)

圖34 PFC電流環(huán)框圖
在Vienna電路中,兩組PFC母線電容對輸入等效為以中點為基準的兩個并聯(lián)電容組,三相二極管電流對其充電,對輸出而言其又等效為兩個串連的電容,對負載供電,所以每相流入PFC電容電流和流出PFC電容電流的關系為2/3。
故三相Vienna拓撲的主電路傳遞函數(shù)為:

L_fulload為滿載情況下PFC電感值,RL為電感串聯(lián)電阻。
我們知道了主電路的傳遞函數(shù)后,其他比如AD增益(包括采樣、保持、轉換)、硬件采樣電路、Fm等傳遞函數(shù)都可以表達出來了。這樣除了補償器之外的開環(huán)傳遞函數(shù)都清楚了,計算或者仿真出除補償器的Bode圖,根據(jù)開環(huán)傳遞函數(shù)的Bode圖,設計出合理的補償器。
在數(shù)字電源控制中,一般采用的補償器有PI控制器、SZSP控制器、2P2Z控制器、3P3Z控制等。在開關頻率以下,電流環(huán)開環(huán)傳遞函數(shù)為一個單極點系統(tǒng),可以將補償函數(shù)設計為一個PI控制系統(tǒng)。
由于PFC電感在不同的直流偏置下感量變化非常明顯,nFeSi材質(zhì)在正弦電流過零點和峰值附近相差近3倍,為了能提高過零點的低頻增益和帶寬,同時保證峰值附近的穩(wěn)定,我們需要實時的調(diào)節(jié)電流環(huán)的相關參數(shù),這樣能時時的改善帶寬和增益。
-
電壓環(huán)

圖35 PFC電壓環(huán)
PFC電流內(nèi)環(huán)和功率級形成一個電流源,因此PFC電壓環(huán)的被控對象在低頻可以等效為驅(qū)動電容的電流源,在100Hz頻率附近,電壓環(huán)開環(huán)傳遞函數(shù)為一個單積點系統(tǒng)。PFC電壓環(huán)在確保當負載變化時輸出電壓穩(wěn)定的同時,帶寬應該足夠低,從而使頻率大于100Hz時的環(huán)路增益足夠低,以減小PFC輸出電容上的100Hz電壓紋波對PFC輸入電流的調(diào)制作用,否則該調(diào)制作用會引起輸入電流的嚴重畸變,當然過低的電壓環(huán)帶寬回導致電壓動態(tài)速度過慢,在THD設計滿足要求的情況下,可以再調(diào)節(jié)帶寬。
以上是針對穩(wěn)態(tài)的電壓環(huán)設計,如果輸入或者輸出在進行動態(tài)跳變,為了保證電路的可靠性,可以加入快環(huán)。也即在動態(tài)時,為了加快環(huán)路響應,滿足動態(tài)的要求,采用另外一組環(huán)路參數(shù),同時去除軟件濾波。當總母線電壓采樣大于或者小于當前總母線電壓給定的一定值時,進入快環(huán);當總母線電壓采樣不再大于或者小于當前總母線電壓給定另一值時,退出快環(huán)。當然,由于母線電容的ESR容易受環(huán)境溫度的影響,所以當環(huán)境溫度過低時,母線電容的ESR增大,電壓環(huán)調(diào)節(jié)過快,會導致母線電壓過壓。
所以電壓環(huán)的設計不僅要考慮到穩(wěn)態(tài)的低帶寬,還要考慮動態(tài)響應以及受環(huán)境溫度的影響。
-
母線電壓偏壓環(huán)
PFC電路有正負母線輸出,所以要控制正負輸出平衡: 。把疊加到電壓波形給定中去,這樣可以調(diào)節(jié)母線平衡(見均壓原理分析)。
。把疊加到電壓波形給定中去,這樣可以調(diào)節(jié)母線平衡(見均壓原理分析)。
母線電壓偏壓環(huán)是純比例環(huán)節(jié),即有靜差調(diào)節(jié),所以即使最終調(diào)節(jié)穩(wěn)定的情況下,母線還是會存在一定的差異,如果K越大,δ 輸出就越大,調(diào)節(jié)能力就越強,平衡度就越好,但是注入到輸入電流的諧波也就越大,影響THD指標。所以需要在THD和母線平衡之間做出平衡。
為了消除正、負母線之間的靜差,可以采用PI環(huán)節(jié)來代替純比例環(huán)節(jié),但是積分環(huán)節(jié)本身存在退飽和的問題,對于Vp, Vn 不停變化的系統(tǒng),調(diào)壓是通過改變小矢量的持續(xù)時間,積分的響應速度慢,可能反而對小矢量超調(diào)或欠調(diào),導致正、負母線電壓一直處于偏壓的狀態(tài)。所以采用純比例環(huán)節(jié)進行正、負母線電壓的調(diào)節(jié)可以保證時時性。
由于母線偏壓環(huán)的調(diào)節(jié),會對THD造成影響,所以要根據(jù)母線偏壓的程序選擇比例系數(shù)和輸出δ的最大范圍,避免過分調(diào)節(jié)。
-
補償器的數(shù)字化
數(shù)字補償器設計流程如下:
-
首先選擇一個合適的已知原型濾波器傳遞函數(shù)(要選擇合適的零極點); -
將該原型濾波器的s域傳遞函數(shù)映射到z域中; -
將z域轉換為時域內(nèi)的線性差分方程;
從s域到z域的變換,我們一般采用雙線性變換,又稱Tustin變換和梯形變換。它將s域中的模擬傳遞函數(shù)轉換為z域中的等效數(shù)字傳遞函數(shù),它只是表示的一個近似值,相對于采樣頻率的交叉頻率越低,近似值就越可靠。
以3P3Z控制器設計為例,在s域的表達式為:

進行雙線性變換,將  帶入Hc(s)中,經(jīng)過化簡可以得出z域表達式:
帶入Hc(s)中,經(jīng)過化簡可以得出z域表達式:

將z域轉換為線性差分方程:

在MCU里面執(zhí)行的大致過程如圖36所示:

圖36 數(shù)字Ⅲ型控制器實現(xiàn)方式
如想更詳細的了解模擬s域到z域的轉換,請登錄Microchip官網(wǎng)或者咨詢相關應用工程師。
-
二極管
+關注
關注
147文章
9406瀏覽量
164356 -
充電模塊
+關注
關注
0文章
33瀏覽量
13110 -
VIENNA
+關注
關注
2文章
12瀏覽量
8211
發(fā)布評論請先 登錄
相關推薦
美高森美展出新型30 kW三相Vienna PFC參考設計和SiC解決方案
基于powerSUITE的TIDM-1000三相VIENNA PFC方案的軟件實施過程是怎么樣的?
C2000 MCU三相功率因數(shù)校正參考設計包括BOM及層圖
探討交流個人對「三相 VIENNA 拓撲」的理解
三相VIENNA整流器調(diào)試過程中遇到的問題
如何實現(xiàn)三相五電平CSI拓撲的設計?
T型三電平雙向整流和逆變的功能
三相三電平VIENNA整流器的仿真分析
三相電源測量基礎知識

大廠48V100A 電源,三相輸入,Vienna+三電平半橋 拓撲,內(nèi)容包含原理圖 源代碼 附贈大功率電源開發(fā)資料
一個關于三相Vienna拓撲技術知識(下)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論