") 詳解stm32定時(shí)器的編碼器模式
詳解stm32定時(shí)器的編碼器模式
前言:
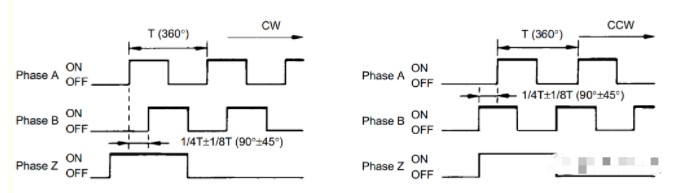
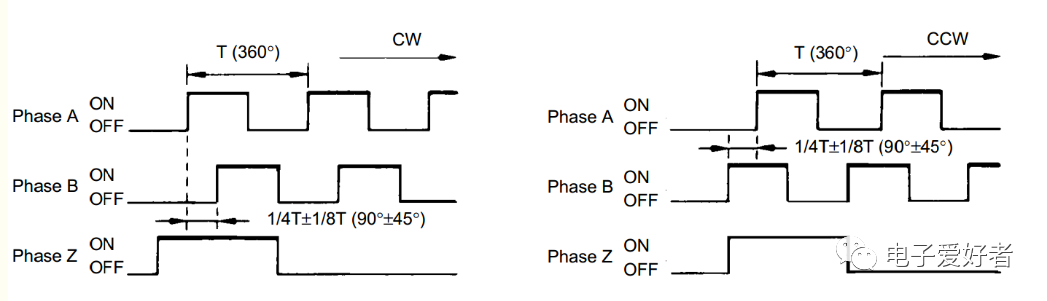
增量式編碼器在實(shí)際應(yīng)用中還是很常見。stm32的定時(shí)器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來(lái)計(jì)數(shù),z相輸出零點(diǎn)信號(hào)。AB相根據(jù)旋轉(zhuǎn)的方向不同,輸出的波形如下圖所示:
第一步:具體配置如下圖:

重點(diǎn)說(shuō)明:
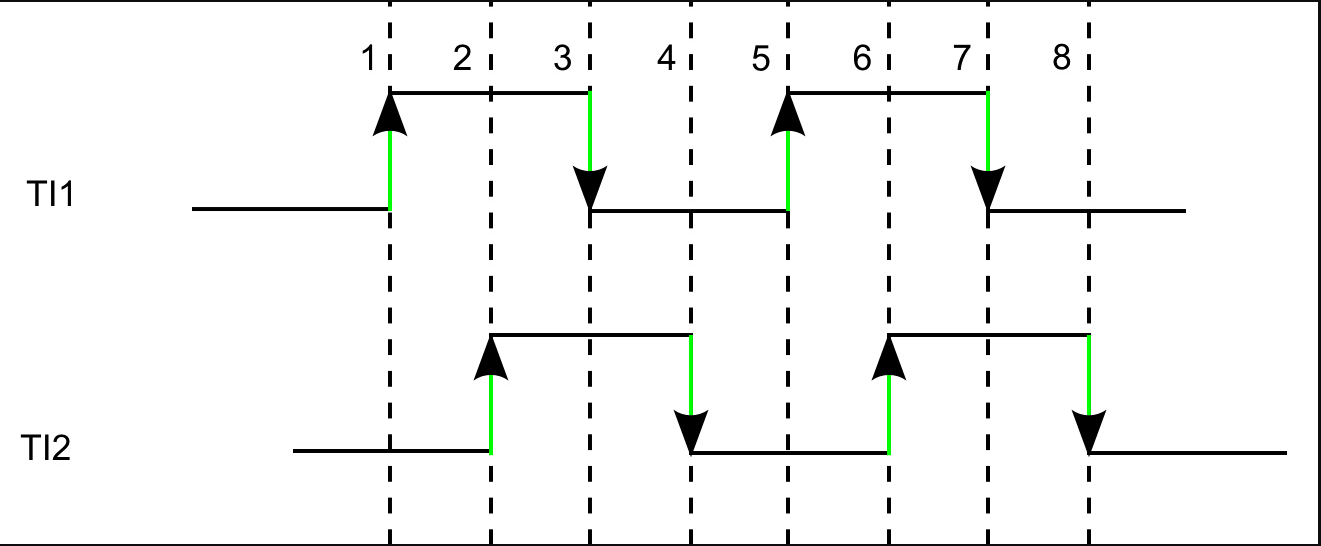
一、如果編碼模式設(shè)置為 Encoder Mode TI1 and TI2 則會(huì)默認(rèn)檢測(cè)AB相的上升沿與下降沿;
每一個(gè)上升沿和下降沿都觸發(fā)計(jì)數(shù),所以每轉(zhuǎn)一格計(jì)數(shù)器就會(huì)+4;那么上圖計(jì)數(shù)周期設(shè)置為400;也就是編碼器轉(zhuǎn)100格,計(jì)數(shù)器就會(huì)置零,重新開始計(jì)數(shù)!
二、關(guān)于Polarity參數(shù):這個(gè)參數(shù)的意思是在檢測(cè)到上升沿的時(shí)候就觸發(fā)encoder捕獲AB相的值,而并不是這里設(shè)置的是上升沿就只檢測(cè)AB相的上升沿,下降沿還是同樣會(huì)計(jì)數(shù)的。
第二步:
可以根據(jù)自身需要在NVIC 中斷控制器中配置中斷響應(yīng)優(yōu)先級(jí)。這里的配置方法可以參考前面幾章!
第三步:代碼分析:
static void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 0;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 400;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI12;
sConfig.IC1Polarity = TIM_ICPOLARITY_FALLING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 15;
sConfig.IC2Polarity = TIM_ICPOLARITY_FALLING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 15;
if (HAL_TIM_Encoder_Init(&htim4, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL); //啟動(dòng)編碼器接口
/* USER CODE END TIM4_Init 2 */
}
//主函數(shù)里面調(diào)用計(jì)數(shù)值
while (1)
{
// Enc_Count:獲取計(jì)數(shù)個(gè)數(shù)
Enc_Count = __HAL_TIM_GET_COUNTER(&htim4);
//若需要檢測(cè)編碼器轉(zhuǎn)了多少格,記得要/4,因?yàn)檗D(zhuǎn)一格是+4;
//Enc_Count = __HAL_TIM_GET_COUNTER(&htim4)/4;
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177479 -
編碼器
+關(guān)注
關(guān)注
45文章
3601瀏覽量
134201 -
STM32
+關(guān)注
關(guān)注
2266文章
10876瀏覽量
354925 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3241瀏覽量
114514
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
電機(jī)控制基礎(chǔ)3——定時(shí)器編碼器模式使用與轉(zhuǎn)速計(jì)算
上篇介紹了 定時(shí)器捕獲輸入脈沖的原理 ,那種方式是根據(jù)捕獲的原理,手動(dòng)切換上升沿與下降沿捕獲,計(jì)算脈沖寬度的過(guò)程原理比較清晰,但編程操作起來(lái)比較麻煩。 對(duì)于電機(jī)測(cè)速用到的正交編碼器,測(cè)速時(shí)需要捕獲2

STM32利用定時(shí)器編碼器模式處理帶編碼器直流電機(jī)
STM32 Cubemax(五) —— STM32利用定時(shí)器編碼器模式處理帶編碼器直流電機(jī)文章目
發(fā)表于 09-03 07:38
stm32 定時(shí)器的編碼器模式有哪幾種呢
stm32 定時(shí)器的編碼器模式有哪幾種呢?STM32固件庫(kù)中編碼器接口的配置函數(shù)是怎樣的?
發(fā)表于 11-15 06:11
請(qǐng)問(wèn)怎么實(shí)現(xiàn)STM32f103定時(shí)器配置為編碼器模式使用?
請(qǐng)問(wèn)怎么實(shí)現(xiàn)STM32f103定時(shí)器配置為編碼器模式使用?
發(fā)表于 11-18 07:30
STM32單片機(jī)定時(shí)器1設(shè)置成為AB項(xiàng)編碼器模式的方法
STM32單片機(jī)定時(shí)器1設(shè)置成為AB項(xiàng)編碼器模式大家好·,我是DXZ,這篇博客是使用STM32單片機(jī)定時(shí)
發(fā)表于 11-26 08:09
STM32F407定時(shí)器編碼器接口模式的相關(guān)資料推薦
STM32F407定時(shí)器編碼器接口模式16位定時(shí)器擴(kuò)展32位
發(fā)表于 01-12 06:17
怎樣去使用STM32定時(shí)器的編碼器模式呢
STM32F103-定時(shí)器編碼器模式和高級(jí)定時(shí)器輸出互補(bǔ)的PWM信號(hào)剛使用STM32時(shí)使用輸入捕
發(fā)表于 01-14 08:02
為什么STM32單片機(jī)的定時(shí)器PWM輸入捕獲模式無(wú)法讀取編碼器呢
為什么STM32單片機(jī)的定時(shí)器PWM輸入捕獲模式無(wú)法讀取編碼器呢?怎樣去解決STM32單片機(jī)的定時(shí)器
發(fā)表于 01-21 06:30
電機(jī)控制知識(shí)——定時(shí)器的編碼器模式的使用
,計(jì)數(shù)器向上計(jì)數(shù),反轉(zhuǎn)時(shí),通道A的信號(hào)滯后,向下計(jì)數(shù)。設(shè)置信號(hào)的極性反相,可以使向下計(jì)數(shù)代表電機(jī)正轉(zhuǎn)。 2 定時(shí)器編碼器模式配置以STM32
發(fā)表于 03-05 07:00
STM32單片機(jī)定時(shí)器1設(shè)置成為AB項(xiàng)編碼器模式
STM32單片機(jī)定時(shí)器1設(shè)置成為AB項(xiàng)編碼器模式大家好·,我是DXZ,這篇博客是使用STM32單片機(jī)定時(shí)
發(fā)表于 11-18 15:21
?21次下載

STM32——編碼器測(cè)速原理及STM32編碼器模式
本問(wèn)講解了編碼器測(cè)速原理及STM32編碼器模式,文末有STM32編碼器
發(fā)表于 11-26 11:36
?270次下載
STM32F103-定時(shí)器編碼器模式和高級(jí)定時(shí)器輸出互補(bǔ)的PWM信號(hào)
STM32F103-定時(shí)器編碼器模式和高級(jí)定時(shí)器輸出互補(bǔ)的PWM信號(hào)剛使用STM32時(shí)使用輸入捕
發(fā)表于 01-14 12:53
?11次下載
STM32CubeMx定時(shí)器編碼器模式基本使用方法
增量式編碼器在實(shí)際應(yīng)用中還是很常見。stm32的定時(shí)器帶的也有編碼器模式。所用的編碼器是有ABZ
發(fā)表于 06-01 14:36
?5669次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論