") MBD模型設(shè)計的PWM輸出步驟和方法
MBD模型設(shè)計的PWM輸出步驟和方法
摘要
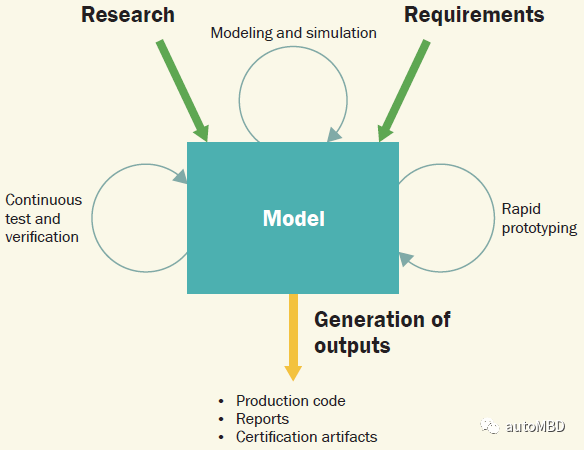
本篇筆記主要記錄基于MBD模型設(shè)計的PWM輸出步驟和方法。前期工具箱的安裝不在本文檔討論范圍內(nèi)。
準(zhǔn)備工作
2,按照文檔配置編譯器和設(shè)置路徑以及l(fā)icense激活,QSG里面寫的很清楚,這里不在贅述。
模型設(shè)計
正確安裝MBD工具箱后,在simulink里面可以看到到MPC5744的外設(shè)和例程,這里我們設(shè)計三相PWM輸出來建立名字為PWM的模型,為后續(xù)電機控制打下基礎(chǔ),因為三相PWM互補輸出可以用來控制電機運轉(zhuǎn)。

建立的模型如下,根據(jù)自己的實際修改管腳和參數(shù),這里使用PWM0,

PWM 配置


因為要控制電機,所以一般我們需要同步輸出,使用subsystem 0 同步通道1和通道2. 保證管腳和頻率,以及死區(qū)配置正確,就可以編譯,如果沒有錯誤,就可以生成代碼。
編譯
建立好模型后,編譯如果沒有錯誤就可以生成代碼,也可以調(diào)整代碼生成的配置選項。


生成的代碼


燒錄bootloader
先將rbf文件bootloader燒進板子,這樣就可以直接從simulink里面直接下載了。bootloader可以是串口,也可以是CAN口引導(dǎo),如果之前已經(jīng)燒錄過bootloader,則這一步可以省略,如果不想使用bootloader也可以直接使用仿真器下載elf文件到你自己的板子中,或者將xml文件導(dǎo)入S32DS,使用仿真器可以在S32DS里面在線仿真。后面我們可以抽時間給大家介紹下怎么導(dǎo)入XML文件在S32DS里調(diào)試SIMULINK生成的工程。

下載代碼
然后就可以重新編譯并生成代碼下載,


測試
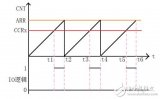
使用示波器觀察PWM輸出是否符合預(yù)期輸出,也可以使用freemaster軟件上位機觀測,這里使用示波器觀測三相PWM輸出。通過下圖可以看到 PWM A0和PWMB0 輸出互補, 10k頻率,死區(qū)時間也符合設(shè)計。


可以看到通過模型很好的控制了PWM輸出頻率和占空比,可以動態(tài)調(diào)整模型參數(shù)觀測輸出結(jié)果。
總結(jié)
至此基于MBD模型設(shè)計的PWM輸出滿足要求,符合設(shè)計需求,為后續(xù)電機控制模型打下基礎(chǔ),有興趣的可以研究更多基于模型的PWM功能設(shè)計。
-
PWM
+關(guān)注
關(guān)注
114文章
5141瀏覽量
213398 -
模型設(shè)計
+關(guān)注
關(guān)注
0文章
10瀏覽量
8210 -
MBD
+關(guān)注
關(guān)注
0文章
24瀏覽量
8940
發(fā)布評論請先 登錄
相關(guān)推薦
基于模型的設(shè)計(MBD)的深入討論
基于模型的高級電機控制系統(tǒng)設(shè)計
MBD設(shè)計模式
PWM輸出原理、PWM工作過程、PWM功能常用函數(shù)和PWM輸出配置步驟
PWM輸出實驗步驟,PWM輸出代碼
MBD模型設(shè)計的CAN通信步驟和方法

基于MBD模型設(shè)計的CAN通信步驟和方法
基于MBD模型設(shè)計的PWM輸出步驟和方法
初識MBD及MBD模型管理
MBD的界限和范圍
構(gòu)建MBD仿真模型和狀態(tài)機
CANape/vMeasure exp控制OUTMM輸出PWM波的方法

PWM輸出配置方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論