 MEMS陀螺儀可在惡劣的高溫環境中提供精密慣性檢測
MEMS陀螺儀可在惡劣的高溫環境中提供精密慣性檢測
越來越多的應用需要從位于極高溫環境中的傳感器收集數據。近年來,半導體、無源器件和互連器件在實現高精度數據采集和處理方面取得了長足的進步。然而,對于可在高達175°C的溫度下工作的傳感器的需求仍未得到滿足,特別是在微機電系統(MEMS)提供的易于使用的外形尺寸中。與分立式傳感器相比,MEMS傳感器通常更小、功耗更低、成本更低。此外,它們還可以在同一半導體封裝中集成信號調理電路。
高溫MEMS加速度計ADXL206已經發布,可提供高精度傾斜(傾斜)測量。然而,在最終產品可能受到嚴重沖擊、振動和劇烈運動的惡劣環境中,仍然需要額外的自由度來精確測量系統的運動。這種類型的濫用會導致系統的過度磨損和早期故障,從而產生高昂的維護或停機成本。
為了滿足這一需求,ADI公司開發了一款集成信號調理功能的新型高溫MEMS陀螺儀ADXRS645。該傳感器即使在存在沖擊和振動的情況下也能進行精確的角速率(轉速)測量,額定溫度高達175°C。
操作理論
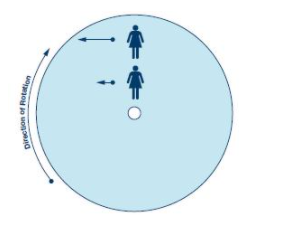
MEMS陀螺儀通過科里奧利加速度測量角速率。科里奧利效應可以解釋如下,從圖1開始。考慮一下自己站在靠近中心的旋轉平臺上。您相對于地面的速度顯示為藍色箭頭長度。如果你要移動到平臺外邊緣附近的一個點,你的速度將相對于地面增加,如較長的藍色箭頭所示。由徑向速度引起的切向速度增加的速率是科里奧利加速度。

圖1.科里奧利加速度示例。向北向旋轉平臺外邊緣移動的人必須增加向西的速度分量(藍色箭頭)以保持北行路線。所需的加速度是科里奧利加速度。
如果Ω是角速率,r 是半徑,則切向速度為 Ωr。因此,如果r在速度v時變化,則會出現切向加速度Ωv。這是科里奧利加速度的一半。還有一半來自改變徑向速度的方向,總共得到2Ωv。如果你有一個質量(M),平臺必須施加一個力(2MΩv)來引起這種加速度,并且質量會經歷相應的反作用力。ADXRS645利用了這種效應,使用類似于人在旋轉平臺上移出和移入的共振質量。質量由多晶硅微加工而成,并拴在多晶硅框架上,因此它只能沿一個方向共振。
圖2顯示,當共振質量向旋轉的外邊緣移動時,它向右加速并向左對框架施加反作用力。當它向旋轉中心移動時,它會向右施加力,如綠色箭頭所示。

圖2.科里奧利效應響應于懸浮在框架內的共振硅塊的演示。綠色箭頭表示基于共振質量的狀態施加到結構上的力。
為了測量科里奧利加速度,包含共振質量的框架通過彈簧相對于共振運動以90°拴在基板上,如圖3所示。該圖還顯示了科里奧利感應手指,用于通過電容式轉導來感應框架的位移,以響應質量施加的力。

圖3.陀螺儀的機械結構示意圖。
圖4顯示了完整的結構,表明隨著共振質量的移動和陀螺儀安裝的表面的旋轉,質量及其框架經歷科里奧利加速度,并與振動運動平移90°。隨著旋轉速率的增加,質量的位移和從相應電容獲得的信號也會發生變化。應該注意的是,陀螺儀可以放置在旋轉物體上的任何位置和任何角度,只要其感應軸平行于旋轉軸即可。

圖4.框架和共振質量體響應科里奧利效應橫向位移。
電容式傳感
ADXRS645通過連接到諧振器的電容式檢測元件測量科里奧利效應引起的諧振質量及其框架的位移,如圖4所示。這些元件是硅束,與連接到基板上的兩組固定硅束交錯,從而形成兩個標稱相等的電容器。由于角速率引起的位移在該系統中會產生差分電容。
實際上,科里奧利加速度是一個極小的信號,產生聲束偏轉的埃分數和相應的電容變化,約為齊法頻量級。因此,盡量減少對寄生源(如溫度、封裝應力、外部加速度和電噪聲)的交叉敏感性非常重要。這部分是通過將電子設備(包括放大器和濾波器)與機械傳感器放置在同一芯片上來實現的。然而,更重要的是在信號鏈的下游進行差分測量,并將信號與諧振器速度相關聯,特別是為了處理外部加速度的影響。
振動抑制
理想情況下,陀螺儀只對旋轉速率敏感,而對其他不敏感。在實踐中,由于機械設計的不對稱和/或微加工不準確,所有陀螺儀對加速度都有一定的敏感性。事實上,加速度靈敏度有多種表現形式,其嚴重程度因設計而異。最重要的是對線性加速度(或g靈敏度)和振動校正(或g2靈敏度),并且可能嚴重到完全淹沒器件的額定偏置穩定性。當速率輸入超出額定測量范圍時,某些陀螺儀的輸出會在軌與軌之間擺動。其他陀螺儀在受到小至幾百克的沖擊時有鎖定的趨勢。這些陀螺儀不會因電擊而損壞,但它們不再響應速率,需要重新通電才能重新啟動。
ADXRS645采用新穎的角速率檢測方法,可以抑制高達1000 g的沖擊——它使用四個諧振器來差分檢測信號,并抑制與角運動無關的共模外部加速度。圖5中的頂部和底部諧振器對在機械上是獨立的,并且它們工作反相。因此,它們測量相同的旋轉幅度,但給出相反方向的輸出。因此,傳感器信號之間的差異用于測量角速率。這樣可以消除影響兩個傳感器的非旋轉信號。信號在前置放大器之前的內部硬接線中組合。因此,極端加速度過載在很大程度上被阻止到達電子設備,從而允許信號調理在大沖擊期間保持角速率輸出。

圖5.四通道差分傳感器設計。
傳感器實現
陀螺儀及相關驅動和檢測電路的簡化原理圖如圖6所示。

圖6.集成陀螺儀的框圖。
諧振器電路感測諧振質量的速度,放大并驅動諧振器,同時保持相對于科里奧利信號路徑的良好控制相位(或延遲)。科里奧利電路用于通過下游信號處理來檢測加速度計幀的運動,以提取科里奧利加速度的大小并產生與輸入旋轉速率一致的輸出信號。此外,自檢功能可檢查包括傳感器在內的整個信號鏈的完整性。
應用示例
可以說,石油和天然氣井下鉆井行業遇到了電子產品最惡劣的環境之一。這些系統利用多種傳感器來更好地了解鉆柱在地表以下的運動,優化操作并防止損壞。以 RPM 為單位測量的鉆孔旋轉速率是鉆孔操作員需要始終了解的關鍵指標。傳統上,這是從磁力計計算得出的。然而,磁力計會受到鉆套管和周圍鉆孔中存在的黑色金屬材料的干擾。它們還必須安裝在特殊的非磁性鉆鋌(外殼)中。
除了簡單的RPM測量之外,人們越來越關注了解鉆柱的運動或鉆井動力學,以最佳地管理施加的力、旋轉速率和轉向等參數。管理不善的鉆井動態可能導致鉆井的高振動和極不穩定的運動,導致到目標區域的鉆井時間延長、設備過早失效、鉆頭轉向困難以及油井本身受損。在極端情況下,設備可能會損壞并留在井中,然后必須以非常高的成本取回。
由于鉆井參數管理不善而導致的一種特別有害的運動類型稱為粘滑。粘滑是一種鉆頭卡住,但鉆柱頂部繼續旋轉的現象。當鉆頭被卡住時,鉆柱的底部會纏繞起來,直到它產生足夠的扭矩來松動,通常是劇烈的。發生這種情況時,鉆頭處的旋轉速率會出現較大的峰值。粘滑往往會周期性地發生,并且可以持續很長時間。粘滑的典型RPM響應如圖7所示。由于地表的鉆柱繼續正常旋轉,鉆井操作人員往往沒有意識到這種破壞性現象正在井下發生。

圖7.粘滑循環 RPM 曲線示例。
此應用的關鍵測量是對鉆頭附近的轉速進行精確、高采樣率測量。陀螺儀(如抗振ADXRS645)非常適合此任務,因為測量與鉆柱的任何線性運動分離。當存在高振動和不穩定運動時,從磁力計計算的旋轉速率會受到噪聲和誤差的影響。基于陀螺儀的解決方案可以即時回答轉速,并且不依賴于過零或其他可能受到沖擊和振動影響的算法。
此外,與磁通門磁力計解決方案相比,基于陀螺儀的電路更小,需要的元件更少,磁通門磁力計解決方案需要多個磁力計軸和額外的驅動電路。信號調理集成在ADXRS645中。支持高溫IC對陀螺儀模擬輸出進行采樣和數字化,采用低功耗、低引腳數封裝。具有數字輸出的額定值為175°C的陀螺儀電路可通過圖8所示的簡化信號鏈實現。數據采集電路的完整參考設計可在 www.analog.com/cn0365 獲得。

圖8.額定 175°C 陀螺儀數字輸出信號鏈。
總結
本文介紹了首款額定工作溫度為175°C高溫的MEMS陀螺儀ADXRS645。該傳感器可在惡劣環境應用中進行精確的角速率測量,從而抑制沖擊和振動的影響。陀螺儀由一系列高溫IC支持,用于采集信號進行處理。
審核編輯:郭婷
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752045 -
半導體
+關注
關注
334文章
27026瀏覽量
216365 -
mems
+關注
關注
129文章
3899瀏覽量
190358
發布評論請先 登錄
相關推薦
MEMS陀螺儀在惡劣高溫環境下提供準確的慣性檢測
MEMS陀螺儀系統的精確導航
利用MEMS陀螺儀實現低噪聲反饋控制設計
MEMS陀螺儀中主要噪聲源的預測和管理
MEMS陀螺儀中主要噪聲源的預測和管理
體聲波陀螺儀傳感器引發慣性MEMS應用新變革
ADI公司的第四代高性能低功耗MEMS陀螺儀支持惡劣工業環境
ADI新款抗振動 MEMS數字陀螺儀提供更高速率檢測精度_A
ADI推出用于高溫環境的MEMS陀螺儀ADXRS645
MEMS陀螺儀技術原理_三軸陀螺儀技術原理

戰術導彈對MEMS慣性傳感器中的陀螺儀有哪四個要求?

淺談MEMS陀螺儀技術 MEMS是否取代光纖陀螺儀技術
什么是MEMS陀螺儀?
MEMS陀螺儀用在哪里?





 工商網監
工商網監
評論