 電動機的位置、速度檢測方法
電動機的位置、速度檢測方法
本篇我們學習一些常用的電動機的位置、速度檢測方法,有的通過電磁感應效應檢測、有的通過光電轉換后檢測、有的通過霍爾元器件檢測,等等。 下面我們就一一來講解。
光電編碼器可以把角度或者速度轉換為數字信號輸出,可以分為絕對式編碼器、增量式編碼器。
我們先講絕對式編碼器,它由光電碼盤和光電檢測裝置組成,如下圖所示:
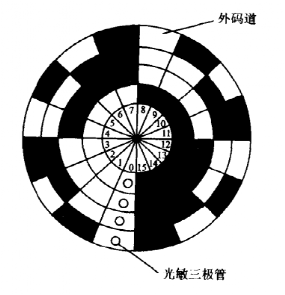
碼盤與電機的轉軸固定,可以隨轉子旋轉; 一列光電轉換裝置(光敏三級管)位置固定,可以檢測到正對位置的黑/白狀態。
圖中的碼盤有4圈編碼,是4位編碼器。 如果白色識別為0黑色識別為1,則圖中位置4個光敏三極管的輸出為0000; 如果逆時針轉動22.5°,則輸出為0001。
4位編碼器一共可以表示16種狀態,所以圖示的編碼器的分辨率為360°/16=22.5°。
因為它的輸出就指示了轉盤的角度位置,所以稱為絕對編碼器。
絕對編碼器想要提高檢測精度,需要提高編碼的位數,也就是要增加碼盤的圈數; 但是不能無限增加,到了極限后,可以采用編碼器級聯的方式提高位數,也就是減速后再接一個編碼器。
絕對式編碼器在檢測位置時,如果正好停在兩個扇區之間,光敏三極管可能把編碼識別為0也可能識別為1,那么就很可能識別出錯。 有兩種解決辦法:
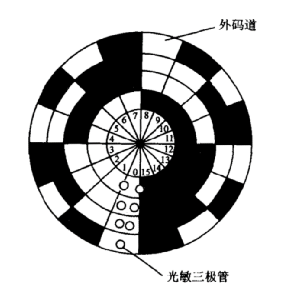
一是使用格雷碼設置碼盤; 二是多使用一組光敏三極管來檢測,最外側的碼道上安裝1只光電管,其他每個碼道上安裝兩只光電管,一只為超前光電管,處于比它低一位的光電管超前的位置; 一只為滯后光電管,處于比它低一位的光電管滯后的位置,如下圖安裝。
最低位直接讀取,i+1位的編碼依據第i位的編碼來取值,如果i位為1則取滯后光電管的讀數,如果i位為0則取超前光電管上的讀數。
格雷碼和超前/滯后法都可以使得誤差與分辨率一致,最多跳一位。
現在講講增量式編碼器,它的結構和絕對式編碼器是差不多的,只是碼盤上的編碼不同。
如下圖,增量式編碼器一般只有三圈編碼,A、B編碼等距離錯開半個扇區寬度排列,C編碼只有一點用于指示零位(有的增量式編碼器沒有C碼道)。 增量式編碼器只能指示轉盤的轉動的相對角度和方向,不能指示絕對位置。
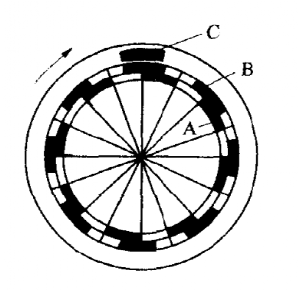
增量式編碼器依據A、B碼道的脈沖數來計算轉過了多少角度。 確定轉動方向時,是依靠A、B編碼的變化關系,如果在B編碼為1時,A編碼從1變為0,則碼盤在順時針轉動時; 如果在B編碼為1時,A編碼從0變為1,則碼盤在逆時針轉動。
2)電磁感應式傳感器
這類傳感器是靠電磁感應原理來實現的。
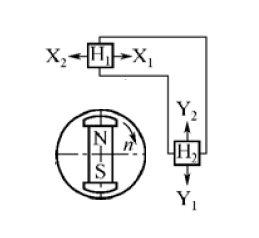
常見的一種電磁式傳感器是開口變壓器,結構示意如下圖:
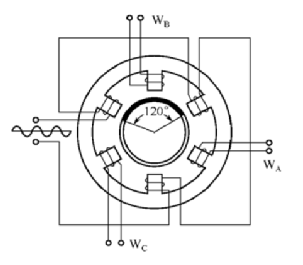
開口變壓器的轉子與電機轉子相連,定子上有一塊120°扇形的導磁材料,其他部分不導磁; 定子上有6個齒,激勵線圈繞在不相鄰的三個繞組上,其他三個相隔120°的繞組上引出WA、WB、WC三個二次繞組。
在工作時,激勵繞組種通入高頻的交流電(比轉子轉速高得多),由于中心的轉子上,只有120°的范圍能導磁(如圖中的位置,只有WB繞組總可以檢測到電壓),所以通過檢測WA、WB、WC三個繞組中的電壓,就能知道轉子的位置。
實際中使用的扇形導磁片的角度不一定是120°,只要能分辨出位置即可; 導磁片的個數應和電機的極對數相等。
除了開口變壓器,還有一種常見的電磁感應式傳感器是測速發電機,有直流或交流,也有單匝線圈或多匝線圈。 它用轉子帶動一個小發電機,接上電阻作為負載后,檢測電壓,可以得知轉子的轉速。 原理比較簡單,就不細說了。
3)霍爾傳感器
霍爾傳感器是用于檢測磁場的器件。 它是利用了霍爾效應,帶電體在與磁力線垂直的方向運動時,會受到磁場的作用力(洛倫茲力)。 霍爾器件安裝方向與磁力線垂直時,會輸出一個電壓,并且這個電壓是可以表示出磁力線的正反方向的。
我們前面講過無刷電機的有感驅動方式,就是使用三個霍爾器件去檢測轉子的位置,以實現換相。
而實際上,由于霍爾的輸出可以指示磁力線的方向,所以只需要兩個成90°安裝的霍爾器件,就能檢測出轉子的位置。 如下圖所示,由霍爾輸出的正負可以知道N/S極的朝向,有兩個霍爾輸出電壓的大小,可以知道磁鐵的旋轉角度:
與霍爾器件相似的一種器件是干簧管,它也可以檢測磁場,但是由于干簧管有機械觸點,它的開關速度比霍爾慢的多;而且,干簧管只能檢測磁場的有無,無法檢測正負!所以在電機測速時一般不使用干簧管。
4)旋轉變壓器
旋轉變壓器一般有相位檢測式和跟蹤方式兩種。
下圖所示是“相位檢測式“旋轉變壓器的基本結構,左邊是定子線圈,中間是轉子線圈,右邊是轉子輸出變壓器:
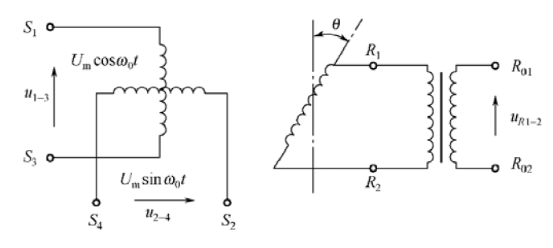
定子線圈有兩個,在空間上相互正交,并且通上相位差為90°的正弦電流進行勵磁,通常勵磁電流頻率遠高于轉速和工頻。
轉子上有一個線圈,可以感應出定子線圈中的交變電流,并通過變壓器輸出。
假設定子線中的電流為U1-3 = Umcosω0t、U2-4 = Umsinω0t,轉子的角度位置為θ,則變壓器的輸出UR1-2 = k*(U1-3cosθ – U2-4sinθ) = kUmsin(ω0t-θ),其中k是變壓器的比例。
可以看到,轉子的旋轉角度就是輸出信號相對于勵磁信號的相移角θ,這樣就能檢測出轉子的位置。(由于這種方法是用檢測相位的方法來檢測轉子位置,所以稱為相位檢測式)
繼續上述的分析,如果轉子正在以角速度ωr轉動,那么上式可以化為:UR1-2 = kUmsin(ω0-ωr)t,也就說輸出信號相對勵磁信號的頻率變化量,就是轉子的轉速。
旋轉變壓器的另一種實現方法,是跟蹤方式,它的結構與相位檢測式類似,但是定子只有一相線圈,而轉子有兩個正交的線圈,通過檢測轉子的兩個線圈輸出的電壓幅值比,來確定轉子的角度。
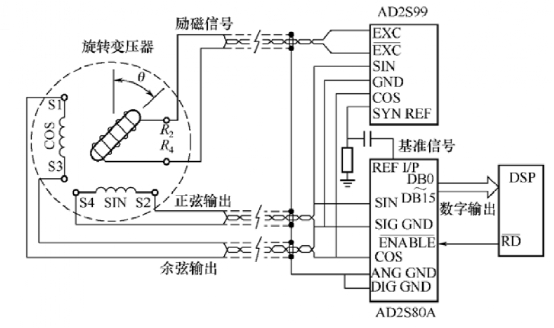
旋轉變壓器這種方式一般在高端設備中用的很多,主要是因為它輸出的是模擬量信號,可以通過高位數的AD采集得到很高的分辨率。而相比與光電編碼器等一些方式,如果想要做到高分辨率,成本會非常高。
但是缺點是,旋轉變壓器方法使用時的計算量較大,需要有強大的處理器做支持,或者使用專用芯片。
如下圖是一種專用芯片的實現方式:
好了,關于一些電機位置、速度的檢測方法,就講到這里了。
-
傳感器
+關注
關注
2548文章
50740瀏覽量
752143 -
編碼器
+關注
關注
45文章
3601瀏覽量
134203 -
電動機
+關注
關注
74文章
4101瀏覽量
96038 -
旋轉變壓器
+關注
關注
3文章
86瀏覽量
15744
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論