") KUKA機器人C4外部自動控制最終版-v1介紹
KUKA機器人C4外部自動控制最終版-v1介紹
啟動外部自動運行
前提條件
運行方式 T1 或 T2
用于外部自動運行的輸入 / 輸出端已配置。
程序 CELL.SRC 已配置。
操作步驟
1. 在導航器中選擇 CELL.SRC 程序。(在文件夾 “R1” 中。)
2. 將程序倍率設(shè)定為 100%。(以上為建議的設(shè)定值。也可根據(jù)需要設(shè)定成其它數(shù)值。)
3. 執(zhí)行 SAK 運動:按住確認開關(guān)。然后按住啟動按鍵,直至提示信息窗顯示 “ 已達 SAK”。
4. 選擇 “ 外部自動 ” 運行方式
5. 在上一級控制系統(tǒng) (PLC) 處啟動程序。 為了停止在自動運行中啟動的程序,請按下停止鍵。
配置自動外部:
如果機器人程序要由上級控制器(例如PLC)集中控制,則可以使用”自動外部”界面來執(zhí)行。
上級控制器通過自動外部接口將用于機器人過程的信號(例如運動使能,故障確認,程序啟動等)傳輸?shù)綑C器人控制器。
機械手控制器將有關(guān)操作狀態(tài)和故障狀態(tài)的信息傳輸?shù)缴霞壙刂破鳌?/p>
為了啟用自動外部接口的使用,必須執(zhí)行以下配置:
| 1 | CELL.SRC程序的配置。 |
| 2 | 自動外部接口的輸入/輸出配置。 |
可以使用 CWRITE 語句和 RUN 從程序 SPS.SUB 調(diào)用 CELL.SRC。該調(diào)用僅在冷啟動的情況下生效。
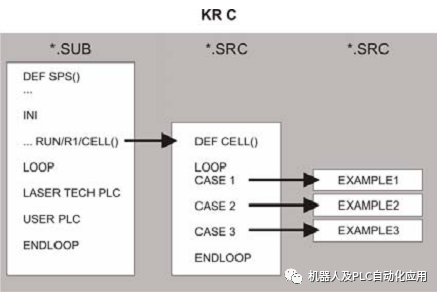
SPS.SUB 在機器人解釋器中選擇 CELL.SRC
IF ($OUT[PF0] AND VW_CALL_CELL AND ( NOT $PRO_MOVE) AND ($MODE_OP==#EX)) THEN
CWRITE($CMD,STAT,MODE,"STOP 1")程序停止
CWRITE($CMD,STAT,MODE,"CANCEL 1")退出程序
P_OLD=P_SELECT
CWRITE($CMD,STAT,MODE,"RUN /R1/CELL ()")調(diào)用CELL程序
ENDIF
配置CELL.SRC
在自動外部模式下,使用程序CELL.SRC調(diào)用Folgen。
1.在主菜單中,選擇啟動>服務(wù)> CELL配置。
2.在“現(xiàn)有程序”窗口中,選擇要插入到CELL.SRC中的程序,然后按添加軟鍵。
3.如果需要,請重復步驟2將其他程序插入CELL.SRC。
4.按確定。響應(yīng)確認請求,詢問是否應(yīng)保存更改。
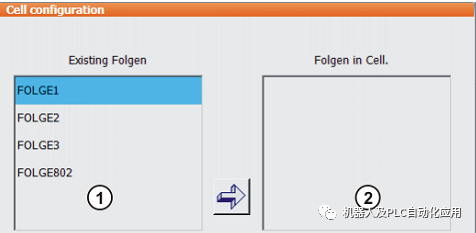
1.可用于配置CELL.SRC的所有Folgen將顯示在“現(xiàn)有Folgen”窗口中。
2.位于CELL.SRC中的所有Folgen都顯示在“單元格”窗口中的Folgen中。
添加: 將選定的程序插入CELL.SRC。僅在“現(xiàn)有程序”窗口中可用。
刪除: 從CELL.SRC中刪除選定的程序。僅在“程序”窗口中可用。
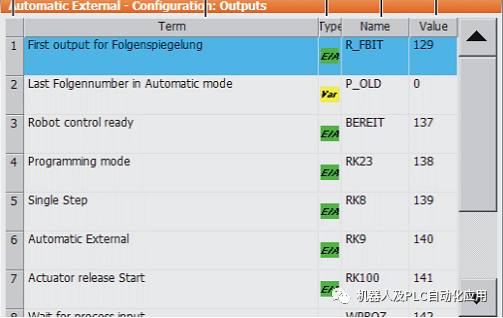
配置自動外部輸入/輸出:
1.在主菜單中,選擇配置>輸入/輸出>自動外部。
2.在“值”列中,選擇要編輯的單元格,然后按“編輯”。
3.輸入所需的值,然后按OK保存。
4.對所有要編輯的值重復步驟2和3。
5.關(guān)閉窗口。更改已保存。

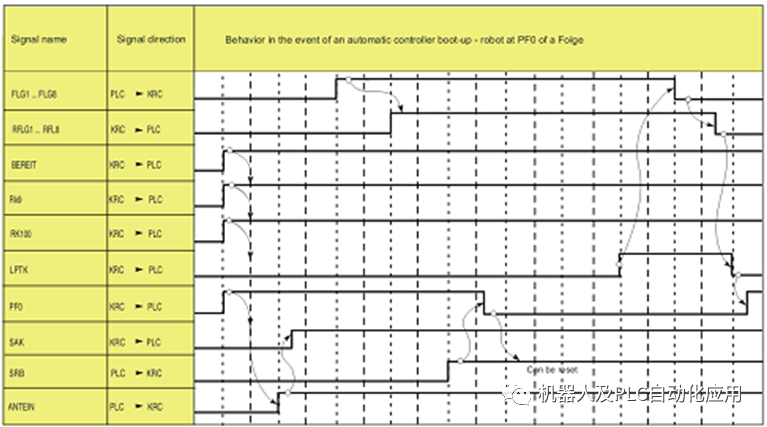
配置外部自動輸入

配置自動外部輸出
自動外部輸入:
ANTEIN
如果在此輸入上設(shè)置了高電平脈沖,則上級控制器將打開機器人驅(qū)動器。
輸入必須永久存在才能啟用操作。如果設(shè)置為低,上級控制器將關(guān)閉機器人驅(qū)動器。
SRB
如果在此輸入上有一個持續(xù)時間至少為20 ms的高電平脈沖,則上級控制器將啟動所選程序。
P_TYPE
該變量定義了讀取上級控制器發(fā)送的程序號的格式。
| 0 |
讀取為二進制數(shù)。 程序號由上位控制器作為二進制編碼的整數(shù)傳輸。不檢查值的奇偶校驗。 |
0 0 1 0 0 1 1 1 => PGNO = 39 |
| 1 |
讀為“ n之1” *。 程序號由上位控制器或外圍設(shè)備作為“ n的1”編碼值發(fā)送。 |
0 0 0 0 0 0 0 1 => PGNO = 1 0 0 0 0 0 0 1 0 => PGNO = 2 0 0 0 0 1 0 0 0 => PGNO = 4 |
P_FBIT
輸入代表程序號的第一位。值的范圍:1…4096。
示例:P_FBIT = 5 =>外部程序號以輸入5開頭。
P_LEN
此變量確定上級控制器發(fā)送的程序號中的位數(shù)。值范圍:1…16。
示例:P_LEN = 4 =>外部程序號為4位長。
自動外部輸出:
R_FBIT
輸出表示程序號的第一位。
輸出區(qū)域的大小取決于定義程序編號(P_LEN)的位數(shù)。
如果上級控制器發(fā)送的程序號未簽名或與格式P_TYPE不對應(yīng),則R_FBIT設(shè)置為FALSE。
P_OLD
此變量指示“自動外部”模式下的最后一個程序號。值范圍:1…999
BEREIT
通過設(shè)置此輸出,機器人控制器將與準備就緒的上級控制器進行通信。
萬一機器人控制器出現(xiàn)錯誤,該輸出將復位,用戶可以通過KCP消除該錯誤。相應(yīng)的錯誤消息顯示在KCP上,例如 如果是Interbus主站錯誤或不允許的操作模式。
RK23
如果設(shè)置了工作模式T1或T2并且沒有程序在運行,則此輸出為TRUE。
RK8
如果設(shè)置了操作模式T1或T2,則此輸出為TRUE。
RK9
審核編輯:劉清
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6546瀏覽量
110492 -
機器人
+關(guān)注
關(guān)注
210文章
28212瀏覽量
206557 -
高電平
+關(guān)注
關(guān)注
6文章
146瀏覽量
21334
原文標題:KUKA機器人C4外部自動控制最終版-v1
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
KUKA庫卡機器人伺服驅(qū)動器相關(guān)型號舉例
庫卡機器人MGV電源模塊維修
庫卡機器人基礎(chǔ)教程和庫卡C4編程指南及焊接機器人教程合集免費下載

KR C4機器人和LBR iiwa機器人的不同之處
KUKA庫卡機器人MGV電源模塊維修PH1013-2840






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論