") 使用TrueTime工具箱對CAN和FlexRay的理論和實(shí)踐進(jìn)行分析
使用TrueTime工具箱對CAN和FlexRay的理論和實(shí)踐進(jìn)行分析
摘要
在汽車系統(tǒng)中,通過局域網(wǎng)(LIN)、控制器局域網(wǎng)(CAN)、FlexRay、以太網(wǎng)等通信網(wǎng)絡(luò)進(jìn)行控制已成為必然。雖然它們的引入帶來的優(yōu)勢值得實(shí)施,但也有一些缺點(diǎn)。它們對控制系統(tǒng)的性能和穩(wěn)定性的不利影響必須經(jīng)過認(rèn)真的分析和設(shè)計(jì),以提出控制結(jié)構(gòu)和補(bǔ)償方法的架構(gòu)。
因此,本文提出了對汽車領(lǐng)域中兩個最常用的通信網(wǎng)絡(luò),即CAN和FlexRay的理論和實(shí)踐分析。理論分析解決了這兩個網(wǎng)絡(luò)最重要的特性,簡要地描述了它們的優(yōu)點(diǎn)和缺點(diǎn)。使用Matlab的TrueTime工具箱對CAN和FlexRay通信網(wǎng)絡(luò)對汽車動力系統(tǒng)的控制性能所引起的時變延遲進(jìn)行了實(shí)際分析。
為了進(jìn)行比較分析,設(shè)計(jì)并實(shí)施了一個預(yù)測控制器,結(jié)果表明,即使在兩個通信網(wǎng)絡(luò)引起時變延遲的情況下,所獲得的性能也不會下降。
I.簡介
現(xiàn)代汽車包括機(jī)械系統(tǒng)(電機(jī)、變速器、轉(zhuǎn)向柱)、電子和數(shù)字組件(電子控制單元、傳感器和執(zhí)行器、數(shù)字通信網(wǎng)絡(luò))和軟件應(yīng)用(嵌入式操作系統(tǒng)、功能)[1]。在車輛的電子系統(tǒng)出現(xiàn)之前,這些部件之間的通信是用機(jī)械或液壓系統(tǒng)進(jìn)行的。但是,現(xiàn)在,通信網(wǎng)絡(luò)有一個重要的作用,因?yàn)檐囕v是分層組織的,數(shù)據(jù)分布在分散的控制網(wǎng)絡(luò)上[2]。
因此,其運(yùn)作基本上取決于不同地點(diǎn)的某些組件之間的協(xié)作。網(wǎng)絡(luò)控制系統(tǒng)的主要特點(diǎn)是在不同的組件(控制器、傳感器、執(zhí)行器)之間信息的交換,例如,傳感器測量值、控制信號,因此,與傳統(tǒng)的控制系統(tǒng)相比,這種類型的系統(tǒng)具有更大的靈活性和更高的可靠性。
然而,由于主要的缺點(diǎn),即時變的延遲和數(shù)據(jù)包的丟失,可能會出現(xiàn)一些問題[3]。因此,在本文中,既對車輛控制結(jié)構(gòu)中使用的通信網(wǎng)絡(luò)(控制器區(qū)域網(wǎng)絡(luò) - CAN和FlexRay)進(jìn)行了理論分析,也對引入這些網(wǎng)絡(luò)對控制系統(tǒng)性能的影響進(jìn)行了實(shí)際分析。
在理論分析中,最常用的通信網(wǎng)絡(luò),控制系統(tǒng)通過它來交換信息,即:對CAN和FlexRay進(jìn)行了簡要的描述,并說明了它們的優(yōu)點(diǎn)和缺點(diǎn)。CAN總線允許車輛中的微控制器在不需要網(wǎng)絡(luò)主機(jī)的情況下進(jìn)行相互通信[4]。
目前,一輛標(biāo)準(zhǔn)汽車有幾十個微控制器,它們通過CAN總線相互通信。諸如 "線控轉(zhuǎn)向 "或 "線控剎車"等 "X-by-wire "系統(tǒng)需要一個具有穩(wěn)定通信、容錯和高速數(shù)據(jù)傳輸?shù)膮f(xié)議。寶馬、戴姆勒、飛利浦和飛思卡爾之間的合作對這些要求作出了回應(yīng),產(chǎn)生了FlexRay協(xié)議[5]。在未來,汽車制造商考慮使用以太網(wǎng)作為強(qiáng)大的后備技術(shù),能夠傳輸來自CAN以及其他總線子系統(tǒng)的流量[6]。
在對車輛控制結(jié)構(gòu)中使用的通信網(wǎng)絡(luò)的實(shí)際分析中,重點(diǎn)是動力系統(tǒng)和用于各組成部分之間信息傳輸?shù)膮f(xié)議(CAN和FlexRay)。對于動力系統(tǒng),使用了具有兩個慣性質(zhì)量的模型,一個慣性對應(yīng)于發(fā)動機(jī)、變速箱和差速器,另一個對應(yīng)于車輛和車輪的質(zhì)量。基于這個模型,設(shè)計(jì)并實(shí)施了狀態(tài)空間預(yù)測控制器,并測試了幾個網(wǎng)絡(luò)控制的案例,目的是觀察網(wǎng)絡(luò)引起的缺陷帶來的的負(fù)面影響,即:時間變化的延遲和數(shù)據(jù)包丟失。
使用TrueTime工具箱(用于Mat- lab/Simulink)[7]對動力系統(tǒng)中使用的通信網(wǎng)絡(luò)進(jìn)行了分析。選擇這個工具箱進(jìn)行仿真,是因?yàn)樗峁┝艘粋€真實(shí)的環(huán)境來測試汽車網(wǎng)絡(luò)化控制系統(tǒng)。
II. 汽車聯(lián)網(wǎng)控制結(jié)構(gòu)
一輛汽車是基于許多電子設(shè)備(子系統(tǒng)),如先進(jìn)的安全系統(tǒng)、動力總成控制模塊、傳感器和診斷工具。這些子系統(tǒng)經(jīng)過多年的發(fā)展,依賴于新網(wǎng)絡(luò)技術(shù)提供的各種通信服務(wù)。因此,現(xiàn)代汽車中的這些系統(tǒng)是分層組織的,并分布在一個具有分散控制的通信網(wǎng)絡(luò)中。
網(wǎng)絡(luò)控制系統(tǒng)的主要特點(diǎn)是信息的交換,例如,傳感器測量值、控制信號,在不同的組件(控制器、傳感器、執(zhí)行器)之間。本文重點(diǎn)討論用于傳輸以下系統(tǒng)信息的通信網(wǎng)絡(luò):發(fā)動機(jī)控制、變速器控制、ABS(防抱死制動系統(tǒng))、X-by-wire、VDC(車輛動力學(xué)控制系統(tǒng))。
隨著新型汽車的發(fā)展,出現(xiàn)了幾十種控制系統(tǒng),從安全氣囊、制動系統(tǒng)、照明系統(tǒng)到多媒體系統(tǒng)。然而,當(dāng)有人提到車輛的計(jì)算機(jī)時,肯定指的是發(fā)動機(jī)控制單元(ECU)。
ECU,也稱為發(fā)動機(jī)控制模塊(ECM),控制內(nèi)燃機(jī)上的一些執(zhí)行器,以優(yōu)化發(fā)動機(jī)性能。發(fā)動機(jī)控制模塊決定節(jié)流閥的角度,需要注入氣缸的燃料量,以及火花塞點(diǎn)亮的時間。在許多車輛中,該控制器還調(diào)節(jié)電力的分配,確保車載診斷,并與其他一些車輛系統(tǒng)進(jìn)行通信,以分配從不同傳感器獲得的信息。
ECM從各種模擬傳感器中獲取數(shù)據(jù),將這些信息數(shù)字化并用于計(jì)算最佳發(fā)動機(jī)設(shè)置。這些計(jì)算的結(jié)果被轉(zhuǎn)換為執(zhí)行器的設(shè)置,模塊的數(shù)字和模擬輸出被用來驅(qū)動這些執(zhí)行元件。如果發(fā)動機(jī)控制功能和變速器控制功能合并在同一個模塊中,該模塊被稱為動力總成控制模塊(PCM)。
今天的ECM一般使用32位微控制器,有幾兆字節(jié)的內(nèi)存,時鐘速度在32MHz和100MHz之間。一般來說,它們使用CAN、FlexRay或LIN總線接口與其他電子模塊通信。車輛聯(lián)網(wǎng)控制結(jié)構(gòu)的通信要求在很大程度上取決于使用該網(wǎng)絡(luò)的子系統(tǒng)。現(xiàn)在,有幾種協(xié)議被用來滿足各種通信要求,包括[9]:
● 容錯性- 通信系統(tǒng)的建立是為了接受某些錯誤,基于冗余的硬件和軟件架構(gòu);此外,它們還應(yīng)該提供防錯保護(hù);
● 確定性 - 確定性通信系統(tǒng)提供有關(guān)實(shí)際情況的保證,即它允許知道某一信息的確切傳輸時間;
● 帶寬--最新的車輛通信技術(shù)提供了足夠大的帶寬,使新的車輛子系統(tǒng)能夠以高度的系統(tǒng)集成方式一起工作;
● 靈活性--這可以看作是在不同時間段管理由某些事件引發(fā)的消息的能力,網(wǎng)絡(luò)負(fù)載的程度,消息流的數(shù)量,網(wǎng)絡(luò)的可擴(kuò)展性和可延伸性;
● 安全性--當(dāng)通信可以從車輛系統(tǒng)外部訪問時,例如通過診斷工具或無線連接,必須確保系統(tǒng)的安全性。
III.車輛通信網(wǎng)絡(luò)的理論分析
汽車行業(yè)使用的通信協(xié)議主要根據(jù)數(shù)據(jù)傳輸速度進(jìn)行分類。美國汽車工程師協(xié)會(SAE)將汽車應(yīng)用分為A、B和C三類,對實(shí)時性和可靠性約束的重要性依次增加[10]。
A.控制器區(qū)域網(wǎng)絡(luò) CAN是一個硬件和軟件的通信協(xié)議,最初由羅伯特-博世公司在1983年為汽車網(wǎng)絡(luò)開發(fā)[11]。CAN總線使用專門設(shè)計(jì)的雙絞線,以便在有電磁噪聲的環(huán)境中提供穩(wěn)定性。CAN協(xié)議的主要應(yīng)用是在汽車行業(yè),包括發(fā)動機(jī)控制、變速器控制、車身控制和車載診斷。
CAN總線也出現(xiàn)在其他分布式控制應(yīng)用中,如工廠自動化、建筑自動化和航空航天系統(tǒng)[12], [13]。CAN總線允許車輛中的微處理器進(jìn)行相互通信,而不需要網(wǎng)絡(luò)主機(jī)。目前,一輛標(biāo)準(zhǔn)的汽車有幾十個微控制器,它們通過CAN總線相互通信,其特性見表一。
根據(jù)數(shù)據(jù)傳輸速度的不同,CAN協(xié)議被劃分為:CAN高速(HS)和CAN低速(LS)。CAN HS的數(shù)據(jù)傳輸速度在125 Kbps和1 Mbps之間。由于數(shù)據(jù)傳輸速度高,它主要用于發(fā)動機(jī)、變速箱和主動安全系統(tǒng)(防抱死制動系統(tǒng) - ABS,電子穩(wěn)定程序 - ESP)。CAN LS的傳輸速率在40到125Kbps之間。CAN LS協(xié)議的優(yōu)點(diǎn)是可以容錯:如果兩條線中的一條中斷了,則在一條線上進(jìn)行通信。這種類型的CAN協(xié)議主要用于集中鎖定和固定器,由于操作和故障狀況。
CAN提供了一個廉價和可持續(xù)的網(wǎng)絡(luò),有助于將多個設(shè)備相互連接。與系統(tǒng)中每個設(shè)備的許多模擬和數(shù)字輸入相比,電子控制單元可以有一個單一的CAN接口,這就是優(yōu)勢。
這降低了成本,也降低了車輛的總重量。網(wǎng)絡(luò)上的每個設(shè)備都有一個CAN控制器,它允許設(shè)備觀察所有傳輸?shù)男畔ⅲ梢詻Q定一個信息是否相關(guān)或應(yīng)該被屏蔽。這種結(jié)構(gòu)允許以最小的影響對CAN網(wǎng)絡(luò)進(jìn)行修改。
網(wǎng)絡(luò)中傳輸?shù)拿總€消息都有一個優(yōu)先級的特征。如果兩個節(jié)點(diǎn)試圖同時傳輸一個消息,那么優(yōu)先級較高的消息將被傳輸,而優(yōu)先級較低的消息將被延遲。這種仲裁是非破壞性的,并導(dǎo)致具有最高優(yōu)先級的信息的連續(xù)傳輸。這也使網(wǎng)絡(luò)具有確定性的特點(diǎn)。
CAN包括一個循環(huán)冗余碼(CRC)來檢查每個幀的內(nèi)容是否有錯誤。錯誤幀會被所有節(jié)點(diǎn)忽略,可以傳輸一個錯誤幀來報(bào)告網(wǎng)絡(luò)中的這個錯誤。全局和局部錯誤由控制器區(qū)分,如果檢測到過多的錯誤,個別節(jié)點(diǎn)可以停止錯誤的傳輸,或者完全從網(wǎng)絡(luò)中斷開連接。
從物理角度來看,CAN協(xié)議包含一條由兩根雙絞線組成的總線,以及包含一個集成收發(fā)器(CAN收發(fā)器)的計(jì)算機(jī)。傳輸信息的電線是扭曲的,以消除任何電磁干擾。集成的發(fā)送和接收電路將接收信息的功能與發(fā)送的功能結(jié)合在同一個組件中。CAN收發(fā)器的電壓為3-5V,其作用是將總線上的電壓轉(zhuǎn)換為數(shù)字信號,反之亦然。
最大的總線長度可以是250米(CAN HS)或50米(CAN LS)。可以連接到總線上的計(jì)算機(jī)的數(shù)量取決于速度和要傳輸?shù)?a target="_blank">參數(shù)的數(shù)量。一個CAN網(wǎng)絡(luò)可以支持多達(dá)50臺互連的計(jì)算機(jī)。在總線的兩端包括大約120Ω的電阻,以增加網(wǎng)絡(luò)阻抗,從而消除信號的 "反射 "現(xiàn)象。
B.FlexRay 諸如 "線控轉(zhuǎn)向 "或 "線控剎車"等 "X-by-wire "系統(tǒng)需要一個具有穩(wěn)定通信、容錯和高速數(shù)據(jù)傳輸?shù)膮f(xié)議。寶馬、戴姆勒、飛利浦和飛思卡爾之間的合作對這些要求作出了回應(yīng),產(chǎn)生了FlexRay協(xié)議[5]。FlexRay協(xié)議的首次實(shí)施是在2006年,用于寶馬X5的自適應(yīng)懸掛。該協(xié)議的工業(yè)化是在2008年在新的寶馬7系上實(shí)現(xiàn)的。
FlexRay是一種用于車輛的網(wǎng)絡(luò)通信協(xié)議,被構(gòu)建為確定性和容錯總線系統(tǒng)。它是由FlexRay聯(lián)盟與領(lǐng)先的汽車制造商合作開發(fā)的。FlexRay為先進(jìn)的通信系統(tǒng)分配高速控制,采用雙通道架構(gòu),實(shí)現(xiàn)系統(tǒng)級冗余。
FlexRay是基于用于連接設(shè)備節(jié)點(diǎn)的非屏蔽雙絞線而設(shè)計(jì)的,在惡劣條件下具有高性能。
 ?
?
支持單信道或雙信道通信區(qū)分,旨在減少噪聲對系統(tǒng)的影響而不增加成本。雙通道FlexRay系統(tǒng)通常用于提高總線和ECU的容錯性。FlexRay的拓?fù)浣Y(jié)構(gòu)包括:多跳總線、星形和混合型。多跳總線的拓?fù)浣Y(jié)構(gòu)與CAN和LIN系統(tǒng)相同,使用一條總線同時連接多個處理器。
星形網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)由幾個電子控制單元連接到一個中央活動節(jié)點(diǎn)組成;這很有用,因?yàn)槿绻粋€設(shè)備被斷開,其他設(shè)備繼續(xù)工作。混合網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)是前兩種的結(jié)合:這種模式結(jié)合了其他兩種模式的可靠性和成本效益優(yōu)勢,很可能是FlexRay技術(shù)的未來[5]。
FlexRay技術(shù)的一些優(yōu)勢是高速通信、容錯性和上面介紹的多功能系統(tǒng)方案(更多細(xì)節(jié)見表一中介紹的最重要特性)。盡管FlexRay可能更昂貴,但它最終可以通過減少車輛中平行CAN網(wǎng)絡(luò)的數(shù)量來降低通信網(wǎng)絡(luò)的成本。
IV.車輛通信網(wǎng)絡(luò)的實(shí)際分析
在對車輛控制結(jié)構(gòu)中使用的通信網(wǎng)絡(luò)的實(shí)際分析中,重點(diǎn)是動力系統(tǒng)控制和使用的協(xié)議,即CAN和FlexRay,在組件之間傳輸信息。對于動力系統(tǒng),使用了一個雙引擎模型。使用Matlab/Simulink的TrueTime工具箱[7],對用于從發(fā)動機(jī)到車輪的動力傳輸?shù)耐ㄐ啪W(wǎng)絡(luò)進(jìn)行了分析。該工具箱被用作仿真媒介,因?yàn)樗鼮閷?shí)時網(wǎng)絡(luò)控制系統(tǒng)提供了一個現(xiàn)實(shí)的方法。
A.動力系統(tǒng)模型 汽車動力系統(tǒng)是將發(fā)動機(jī)的動力傳遞給驅(qū)動輪的機(jī)械系統(tǒng)。目標(biāo)是通過減少振動振蕩來提高舒適性,這可以通過適當(dāng)?shù)膭恿鬏斂刂苼韺?shí)現(xiàn)。為此,需要一個合適的模型來設(shè)計(jì)控制器,它必須滿足兩個要求:它應(yīng)該足夠復(fù)雜,以捕捉動力傳輸系統(tǒng)的基本動態(tài),當(dāng)車輛動力傳輸控制系統(tǒng)[14]發(fā)生延遲時,它應(yīng)該通向一個可延展的問題。近年來,文獻(xiàn)中提出了許多模型,包括有兩個慣性質(zhì)量的模型:一個是對應(yīng)于發(fā)動機(jī)和變速箱的慣性,另一個是對應(yīng)于車輛和車輪的質(zhì)量。
動力系統(tǒng)的離散時間模型由[14]給出 ?
?
其中,xk∈Rn,n∈N是系統(tǒng)狀態(tài),包括發(fā)動機(jī)轉(zhuǎn)速、車輪轉(zhuǎn)速和傳動軸的扭矩,uk∈Rm由發(fā)動機(jī)扭矩作為指令表示,k∈Z+是離散時間指數(shù),  ?
?
B.MPC 設(shè)計(jì)
模型預(yù)測控制設(shè)計(jì)方法基于退行地平線原理[15],[16]。因此,從初始狀態(tài)x = x(k)開始,目標(biāo)是計(jì)算一個控制序列{u0 , u1 , . . . , uN -1 } 使成本函數(shù)在一定范圍內(nèi)最小化,
并執(zhí)行第一條控制指令 u0。(3)中的參數(shù)被定義為:N 是預(yù)測范圍, xi , i = 1, . . . , N是預(yù)測狀態(tài),xss & uss 是使用基于系統(tǒng)模型的參考發(fā)生器計(jì)算的狀態(tài)和輸入的穩(wěn)態(tài)值,P, Q 和 R是適當(dāng)尺寸的權(quán)重矩陣,用于懲罰最終狀態(tài)、中間狀態(tài)和控制命令。最佳控制序列被定義為:
 ?
?
預(yù)測控制法由先前計(jì)算出的最優(yōu)序列中的第一個控制指令表示
 ?
?
對于所考慮的過程,選擇了以下參數(shù):N = 3, P = Q = I3 and R = 2,其中I3代表三階的身份矩陣,產(chǎn)生控制規(guī)律  ?
?  ?
?
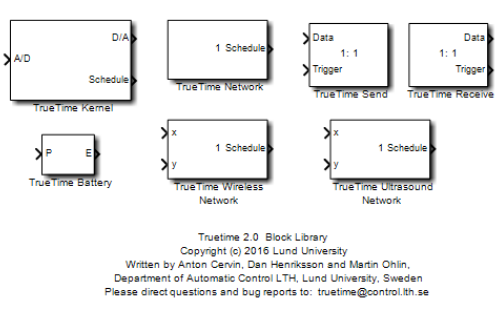
其中 KMP C = (_0.0689 _ 0.0595 3.171). C.TrueTime的實(shí)現(xiàn) 為了通過通信網(wǎng)絡(luò)實(shí)現(xiàn)控制器結(jié)構(gòu),類似于[14]中的結(jié)構(gòu),使用了Matlab/Simulink的TrueTime工具箱。這個工具箱有利于模擬控制器的實(shí)時任務(wù),通過通信網(wǎng)絡(luò)傳輸信息,同時使用動態(tài)過程作為物理工廠[7]。TrueTime模塊作為常規(guī)Simulink模塊被連接起來,形成一個實(shí)時系統(tǒng)。
在運(yùn)行模擬之前,有必要初始化核心和網(wǎng)絡(luò)塊,并為模擬創(chuàng)建任務(wù)、事件、監(jiān)視器等。TrueTime網(wǎng)絡(luò)塊模擬了對環(huán)境的訪問和本地網(wǎng)絡(luò)的數(shù)據(jù)包傳輸。當(dāng)一個節(jié)點(diǎn)試圖傳輸信息時,一個觸發(fā)信號被發(fā)送到相應(yīng)輸入通道的網(wǎng)絡(luò)塊。當(dāng)模擬消息傳輸完成后,網(wǎng)絡(luò)塊向?qū)?yīng)于接收節(jié)點(diǎn)的輸出通道發(fā)送一個新的觸發(fā)信號。傳輸?shù)南⒈环胖迷诮邮展?jié)點(diǎn)的緩沖區(qū)內(nèi)。
其中 KMP C = (_0.0689 _ 0.0595 3.171). 利用雙慣性動力系統(tǒng)模型和預(yù)先確定的控制器,對控制系統(tǒng)中控制器-執(zhí)行器和傳感器-控制器之間的通信進(jìn)行了仿真分析。其目的是觀察網(wǎng)絡(luò)引入的負(fù)面效應(yīng),以及它們對由時間變化的延遲引起的系統(tǒng)的影響。
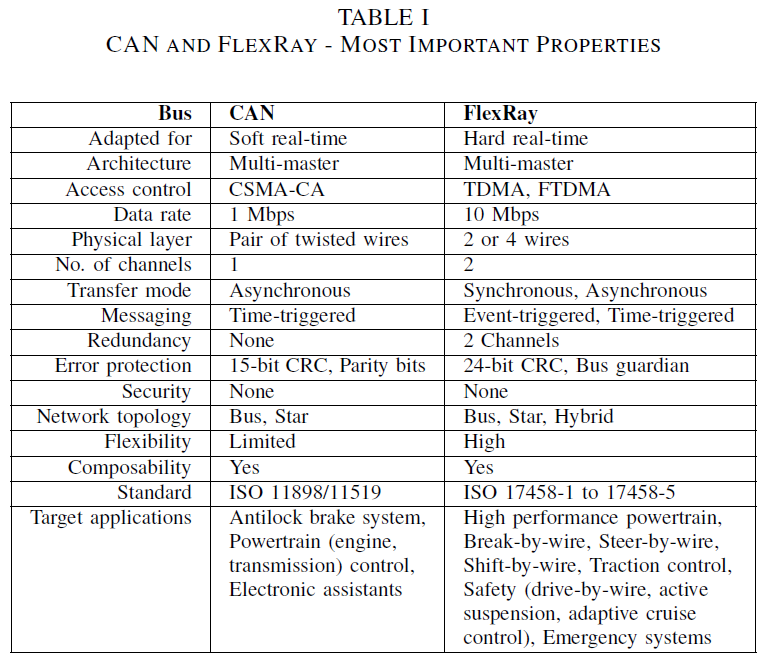
為此,引入了一個額外的節(jié)點(diǎn),稱為干擾節(jié)點(diǎn);它在一定的時間間隔內(nèi)向自己發(fā)送消息,具有加載網(wǎng)絡(luò)的效果。干擾節(jié)點(diǎn)傳輸?shù)南⒌拇笮≡?[min frame size, min frame size+800]范圍內(nèi), 其中min frame size 表示在特定通信網(wǎng)絡(luò)上傳輸?shù)南⒌淖钚〈笮 榱四M動力系統(tǒng),可以包括以下內(nèi)容:CAN和FlexRay。對于其中的每一個,系統(tǒng)的行為是根據(jù)各自網(wǎng)絡(luò)的負(fù)載水平來分析的。作為系統(tǒng)輸出的參考,即車輪速度,考慮了30rad/s的角速度。
在使用CAN和FlexRay通信網(wǎng)絡(luò)分析車輛動力系統(tǒng)時,使用了表二中的參數(shù)。
D.比較結(jié)果
1) 基于CAN的結(jié)果:如前所述,干擾節(jié)點(diǎn)通過向自己發(fā)送消息來加載網(wǎng)絡(luò)。
 ?
?
網(wǎng)絡(luò)負(fù)載級別可以通過參數(shù)設(shè)置,取值范圍為[0,1],表示0%到100%之間的負(fù)載。當(dāng)網(wǎng)絡(luò)負(fù)載達(dá)到10%時,系統(tǒng)性能與不包括通信網(wǎng)絡(luò)的系統(tǒng)性能相似,即超調(diào)量 σ = 0 ,車輪角速度響應(yīng)時間 tr = 8.86s(見圖3)。從40%的負(fù)載水平可以觀察到穩(wěn)定狀態(tài)下的小幅振蕩,這是由網(wǎng)絡(luò)延遲決定的。將負(fù)載水平分別提高到70%,98%,震蕩變得更加頻繁,但性能幾乎保持不變。
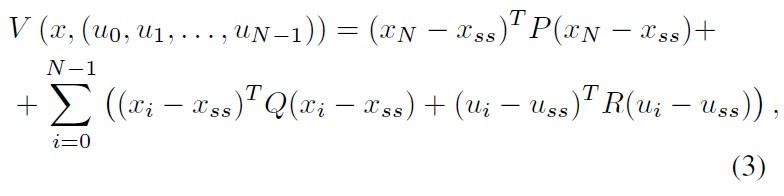
在圖2中的控制指令(發(fā)動機(jī)扭矩)的圖示上可以非常容易地觀察到這些振蕩,它達(dá)到了120 Nm的飽和值,這正是由于網(wǎng)絡(luò)上傳輸?shù)男畔⒌难舆t,干擾節(jié)點(diǎn)阻塞了網(wǎng)絡(luò),也是由于從傳感器到調(diào)節(jié)器的信息傳輸。沒有及時到達(dá)的傳感器信息會導(dǎo)致計(jì)算出錯誤的控制指令。
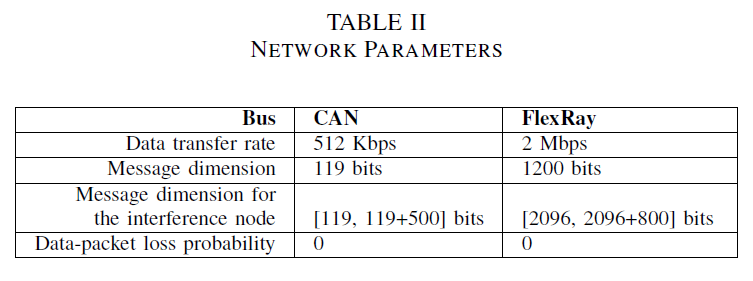
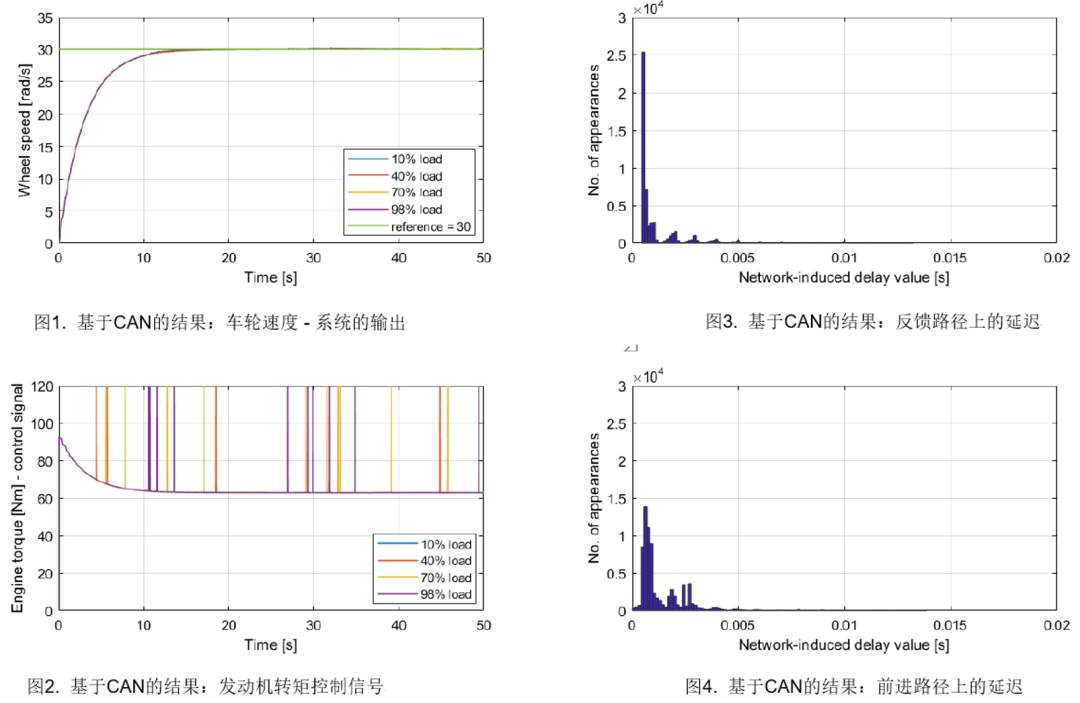
對于等于40%的網(wǎng)絡(luò)負(fù)載,在圖3中可以看到,對應(yīng)于第三狀態(tài)x3的傳感器節(jié)點(diǎn)和控制器節(jié)點(diǎn)之間的傳輸,大部分延遲都在[0.0005, 0.004]秒的區(qū)間內(nèi),最大達(dá)到0.013秒。對于控制器節(jié)點(diǎn)和執(zhí)行器節(jié)點(diǎn)之間的傳輸,大部分延遲都在(0,0.005)秒的區(qū)間內(nèi),最大為0.0138秒(圖4所示)。
2) 基于FlexRay的結(jié)果:
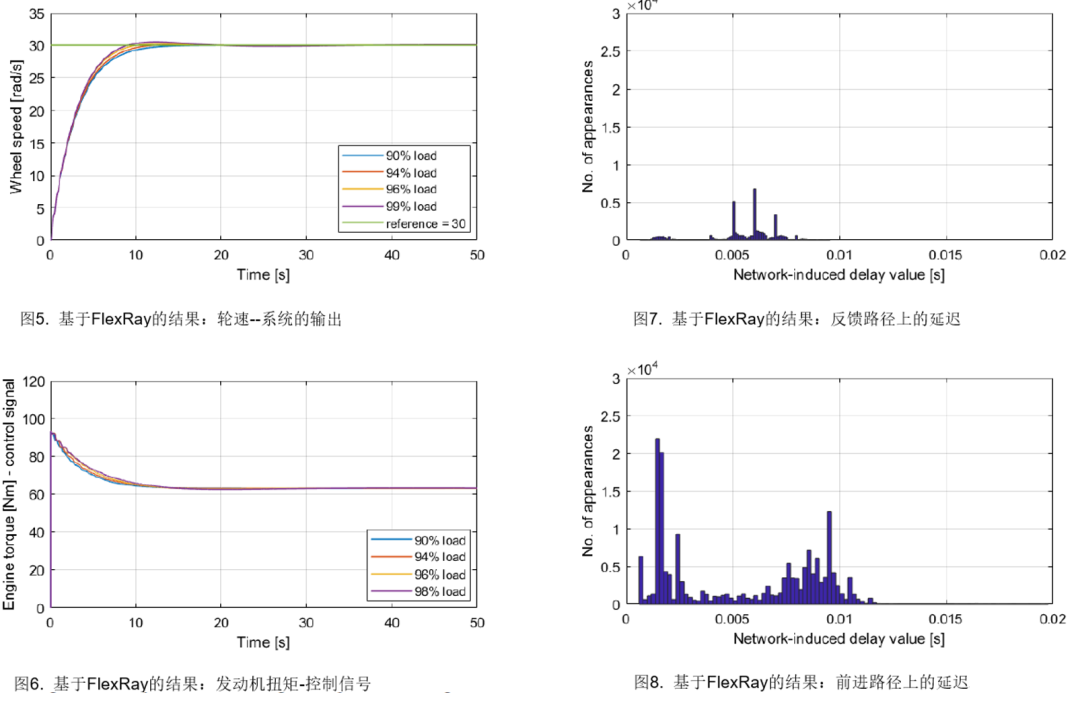
到90%的網(wǎng)絡(luò)負(fù)載時,系統(tǒng)性能與不包括通信網(wǎng)絡(luò)的結(jié)果相似,即超調(diào)σ=0,響應(yīng)時間tr=8.86秒(見圖5)。從94%的負(fù)載水平開始,性能受到輕微影響,導(dǎo)致超調(diào)σ=0.26%,響應(yīng)時間tr=7.71秒。進(jìn)一步增加負(fù)載水平,觀察到響應(yīng)時間的逐漸減少和過沖的增加,因此對于96%的負(fù)載水平值,獲得的性能是:σ=0.8%和tr=7.12秒。
對于98%的負(fù)載水平,過沖值達(dá)到σ=1.73%,響應(yīng)時間tr=6.85秒。超調(diào)的增加和響應(yīng)時間的減少是網(wǎng)絡(luò)延遲的原因,使控制指令更難達(dá)到穩(wěn)定狀態(tài)值,在更長的時間內(nèi)保持較大的數(shù)值(見圖6)。
對于94%的網(wǎng)絡(luò)負(fù)載水平,用圖形表示了反饋路徑和前向路徑的網(wǎng)絡(luò)延遲值以及延遲發(fā)生的數(shù)量。在圖7中可以看到,對應(yīng)于第三狀態(tài)x3的傳感器節(jié)點(diǎn)和控制器節(jié)點(diǎn)之間的傳輸,大部分延遲出現(xiàn)在[0.0017, 0.008]秒的區(qū)間,達(dá)到最大值0.0095秒。對于控制器節(jié)點(diǎn)和執(zhí)行器節(jié)點(diǎn)之間的傳輸,大多數(shù)延遲值被發(fā)現(xiàn)在[0.001, 0.0109] s的范圍內(nèi),其最大值為0.0197 s(見圖8)。
 ? ?
? ?
V.總結(jié)
在本文中,貢獻(xiàn)有兩個方面。首先,進(jìn)行了與車輛控制結(jié)構(gòu)中使用的通信網(wǎng)絡(luò)(CAN和FlexRay)有關(guān)的理論分析;該分析詳細(xì)介紹了每個網(wǎng)絡(luò)的特性、優(yōu)勢和劣勢。其次,進(jìn)行了實(shí)踐部分,其中重點(diǎn)是動力系統(tǒng)和用于在網(wǎng)絡(luò)化控制結(jié)構(gòu)節(jié)點(diǎn)(即控制器、傳感器、執(zhí)行器)之間交換信息的通信協(xié)議。一個具有兩個慣性質(zhì)量的模型被用于動力系統(tǒng),以設(shè)計(jì)一個狀態(tài)空間預(yù)測控制器。對測試通信網(wǎng)絡(luò)在不同網(wǎng)絡(luò)負(fù)載水平(由干擾節(jié)點(diǎn)給出)下得到的系統(tǒng)響應(yīng)進(jìn)行了比較。我們發(fā)現(xiàn),即使延遲發(fā)生的頻率和幅度很高,控制器在測試的情況下也能獲得非常好的性能。
審核編輯:劉清
-
控制器
+關(guān)注
關(guān)注
112文章
15756瀏覽量
174602 -
變速器
+關(guān)注
關(guān)注
5文章
309瀏覽量
34232 -
局域網(wǎng)
+關(guān)注
關(guān)注
5文章
717瀏覽量
46089 -
汽車系統(tǒng)
+關(guān)注
關(guān)注
1文章
128瀏覽量
19627
原文標(biāo)題:基于TrueTime的車輛控制結(jié)構(gòu)通信網(wǎng)絡(luò)分析
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
matlab的其他工具箱及SIMULINK
MATLAB語言工具箱-ToolBox實(shí)用指南
matlab時頻分析工具箱 經(jīng)典模態(tài)分析EMD工具箱
matlab的其他工具箱及SIMULINK
CAN調(diào)度理論與實(shí)踐分析
面向MATLAB工具箱的神經(jīng)網(wǎng)絡(luò)理論與應(yīng)用_叢爽

[面向MATLAB工具箱的神經(jīng)網(wǎng)絡(luò)理論與應(yīng)用].叢爽.掃描版
TrueTime工具箱模塊內(nèi)部結(jié)構(gòu)及功能解析
怎樣改善塑料工具箱的鉸鏈
普查工具箱有哪些以及植保儀器工具箱系列的匯總
MATLAB自動駕駛工具箱使用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論