 小型雙輪差速底盤的制作
小型雙輪差速底盤的制作
1.運動功能說明
小型雙輪差速底盤可以通過兩個驅動輪的 差速運動 來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能。


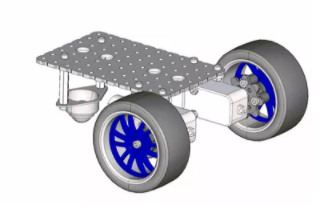
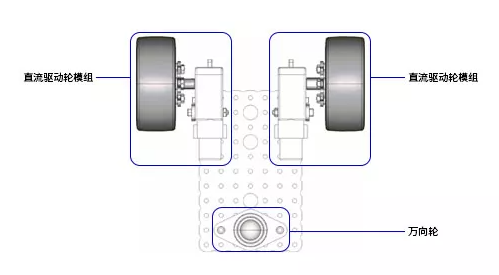
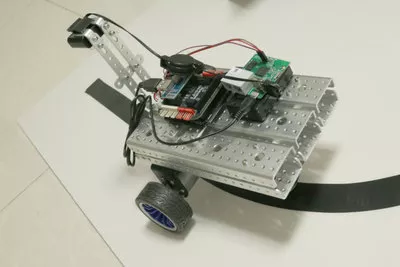
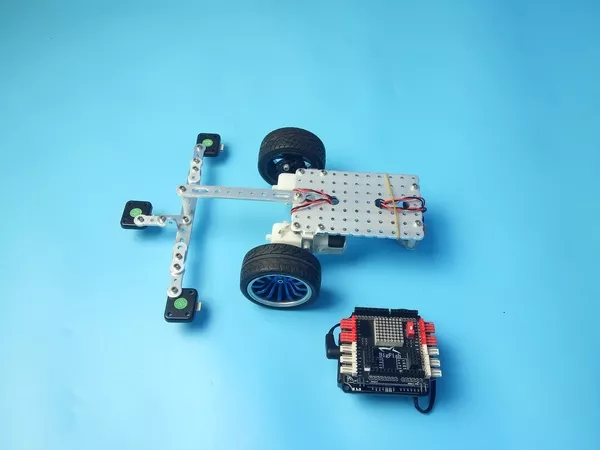
2.結構說明
該樣機由兩個 直流驅動輪模組 構成,驅動輪模組呈軸對稱分布在車架上,再使用萬向輪對車尾進行支撐,保持車身水平。
3.運動功能實現
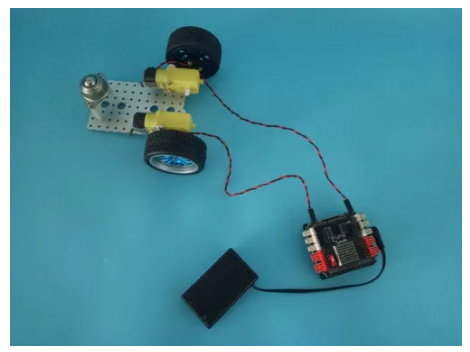
在這個示例中,我們采用了以下硬件,請大家參考:

將TT馬達接在兩個直流電機接口上,兩個直流電機接口的針腳號分別為(D5,D6)以及(D9,D10),并將主控板和電池在車身固定好。
3.2 編寫程序【完整代碼請參考https://www.robotway.com/h-col-113.html】
前進功能的代碼
|
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2022-5-26 https://www.robotway.com/ -------------------------------- 實驗功能: 實現小車前進. -------------------------------- 實驗接線: 車頭 .--------. | | | | 左輪 | | 右輪 D5, D6 *--------* D9, D10 ----------------------------------------------------------------------------------*/ void Forward(); // 前進 //程序初始化部分. void setup() { pinMode( 5 , OUTPUT); //將引腳5設置為輸出模式 pinMode( 6 , OUTPUT); //將引腳6設置為輸出模式 pinMode( 9 , OUTPUT); //將引腳9設置為輸出模式 pinMode( 10 , OUTPUT); //將引腳10設置為輸出模式 } //主程序部分 void loop() { Forward(); delay( 100 ); } // forward子程序封裝. void Forward() { digitalWrite( 5 , LOW ); //將引腳5設置為高電平 digitalWrite( 6 , HIGH ); //將引腳6設置為低電平 digitalWrite( 9 , LOW ); //將引腳9設置為高電平 digitalWrite( 10 , HIGH); //將引腳10設置為低電平 } |
原地轉向功能的代碼
|
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2022-5-26 https://www.robotway.com/ ---------------------------------------------------------- 實驗功能: 實現小車原地轉向. ---------------------------------------------------------- 實驗接線: 車頭 .--------. | | | | 左輪 | | 右輪 D5, D6 *--------* D9, D10 ----------------------------------------------------------------------------------*/ // 原地轉向 void turn_in_Place(); //程序初始化部分. void setup() { pinMode( 5 , OUTPUT); //將引腳5設置為輸出模式 pinMode( 6 , OUTPUT); //將引腳6設置為輸出模式 pinMode( 9 , OUTPUT); //將引腳9設置為輸出模式 pinMode( 10 , OUTPUT); //將引腳10設置為輸出模式 } //主程序部分 void loop() { turn_in_Place(); delay( 100 ); } //原地轉向子程序封裝. void turn_in_Place() { digitalWrite( 5 , LOW ); //將引腳5設置為高電平 digitalWrite( 6 , HIGH ); //將引腳6設置為低電平 digitalWrite( 9 , HIGH ); //將引腳9設置為高電平 digitalWrite( 10 , LOW); //將引腳10設置為低電平 } |
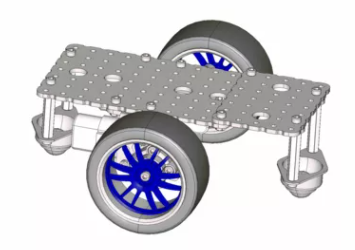
4.擴展樣機
本樣機也有一些擴展,如使用多個萬向輪做支撐的版本,如下圖所示。
5.資料內容
樣機3D文件
例程源代碼
資料下載詳見 https://www.robotway.com/h-col-113.html
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
接口
+關注
關注
33文章
8504瀏覽量
150843 -
直流電機
+關注
關注
36文章
1708瀏覽量
70083 -
底盤
+關注
關注
3文章
243瀏覽量
14660
發布評論請先 登錄
相關推薦
如何搭建實體機器人ros底盤
目錄介紹一、底盤主控板二、嵌入式開發板1. 與上位機pc的關系2. 與STM32主控板的關系介紹自下而上的分析實體機器人(差分輪速機器人)搭建中的關鍵過程。一、底盤主控板本部分搭建實體
發表于 01-20 07:36
差分底盤的設計資料分享
SLAM+語音機器人DIY系列:(四)差分底盤設計——1.stm32主控硬件設計摘要 運動底盤是移動機器人的重要組成部分,不像激光雷達、IMU、麥克風、音響、攝像頭這些通用部件可以直接買到,很難
發表于 02-14 06:29
全方面解讀斯柯達新速派底盤
全新速派帶來了斯柯達最新的設計理念,外觀設計相比老款更時尚張揚,而且幾乎配備了該級別車型具備的所有高科技配置,再有加長軸距之后更優異的空間表現,都將是直接的競爭力體現。那么究竟新速派靚麗外觀的底下,它的底盤如何?今天,我們就一起
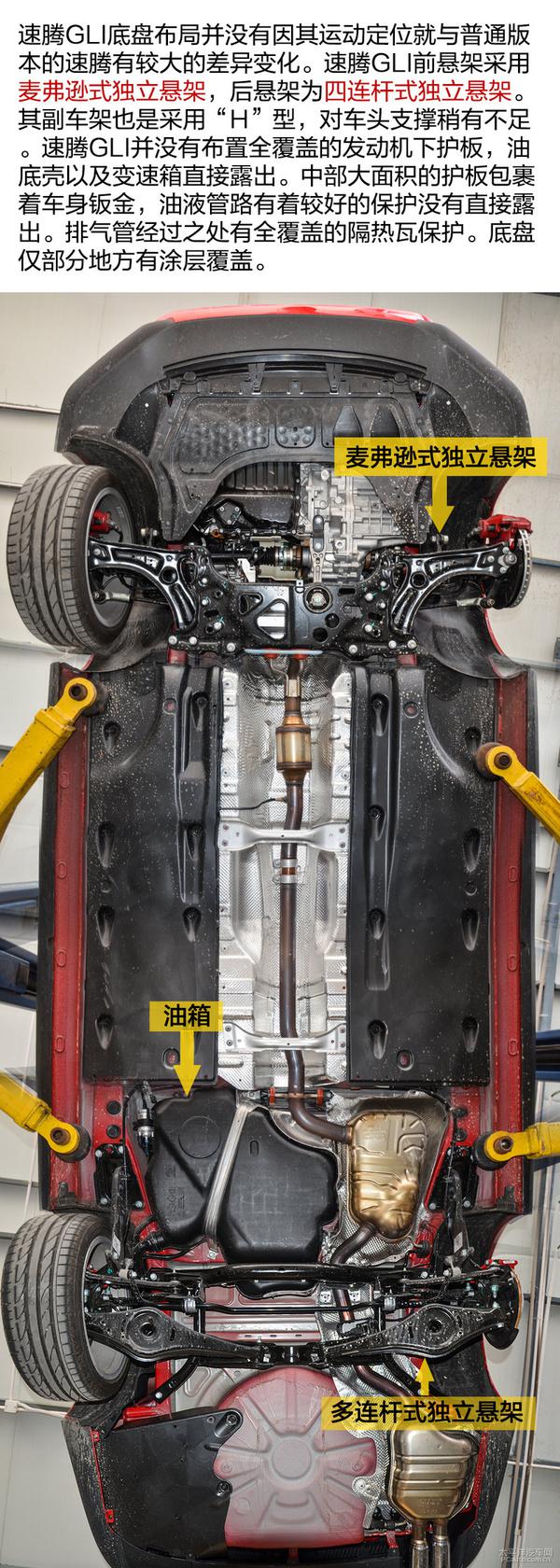
深度解析一汽-大眾速騰GLI底盤
騰GLI就是基于這樣考慮而存在的車型。究竟速騰GLI底盤是否如同普通版速騰一樣呢?還是更多偏向GTI的設定,下面掀開底盤看看。
小型雙節履帶底盤的制作
1.運動功能說明 雙節履帶車可以通過兩個驅動輪的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能,并可通過舵機關節模塊進行小臂的抬起和落下。通過底盤運動與小臂運行的結合,實現上臺階、通過

小型三節履帶底盤的制作
雙節履帶車可以通過兩個驅動輪的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能,并可通過舵機關節模塊進行小臂的抬起和落下。通過底盤運動與小臂運行的結合,實現上臺階、通過坑洼地面等功能。
小型雙輪差速底盤視覺循跡功能的實現
1. 任務描述 ? ? ? 在機器人小車上搭載攝像頭,攝像頭采集圖像信息并通過WiFi將信息傳遞給PC端,然后PC端使用OpenCV對攝像頭讀取到的視頻進行灰度化、高斯濾波、腐蝕、膨脹等處理,使圖像分為黑白兩色。PC端進行圖像信息處理并將處理結果傳遞為下位機,下位機接收上位機處理的圖像信息結果后便會控制小車相應運動,小車運動包含前進、左轉、右轉、停止。 ? 2. 電子硬件 在這個示例中,我們采用了以下硬件,請大家參考: 主控板 Basra(兼容Ard
如何實現雙輪差速底盤躲避懸崖的功能?
1. 功能說明 ? ? ? ?本實驗使用的樣機為R023樣機小型雙輪差速底盤。在樣機前方安裝3個近紅外傳感器 ,實現機器人躲避懸崖、在某平臺
雙輪差速底盤三灰度循跡功能的實現
1. 功能說明 ? ? 在小型雙輪差速底盤樣機前方安裝3個 灰度傳感器 ,實現機器人沿下圖所指定的跑道路線進行運動的效果。 2. 使用樣機
差速電機與無刷電機的區別是什么 差速電機和無刷電機哪個好
差速電機與無刷電機的區別是什么?結構上,無刷電機和差速電機有相似之處,也有轉子和定子,只不過和差速
發表于 03-27 15:07
?1.1w次閱讀





 工商網監
工商網監
評論