 淺析?KUKA機器人固定焊鉗的銑削控制V1
淺析?KUKA機器人固定焊鉗的銑削控制V1
常用IO信號:
A 786 焊接控制器銑削復位
A 842 擺臂伸出/返回 A834銑刀電機旋轉A835銑刀吹氣
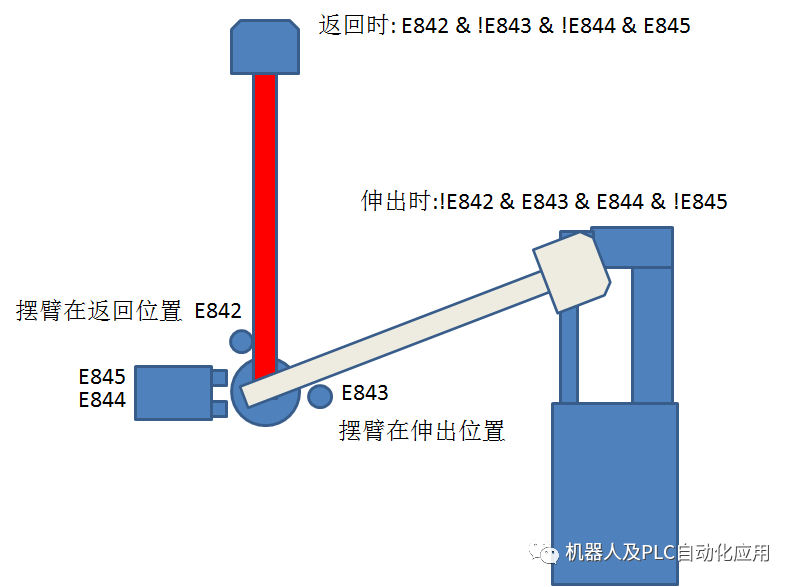
E842 擺臂在返回位置
E843 擺臂在伸出位置
E844 在回位的取反信號
E845 在伸出位的取反信號
E834 銑刀圈數檢測
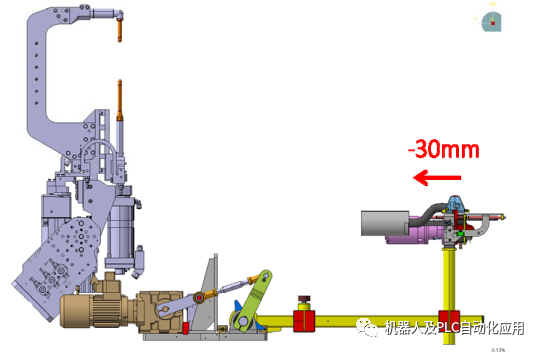
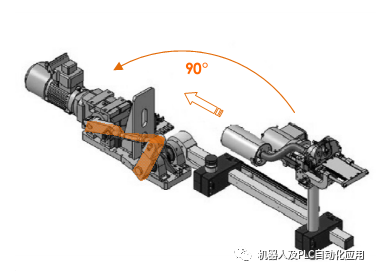
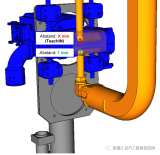
工作示意圖:
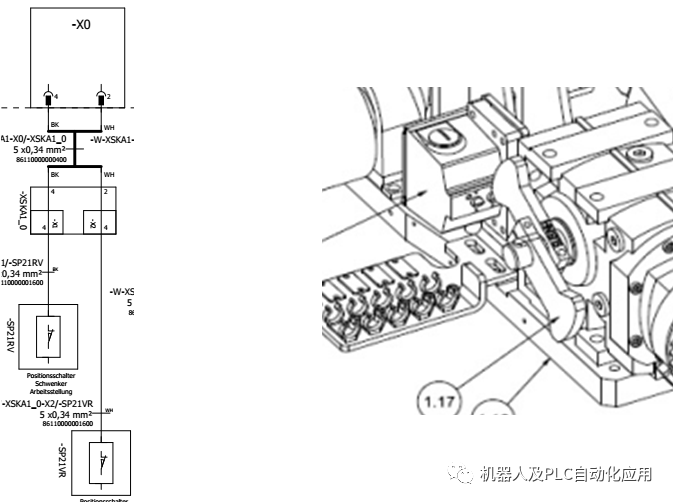
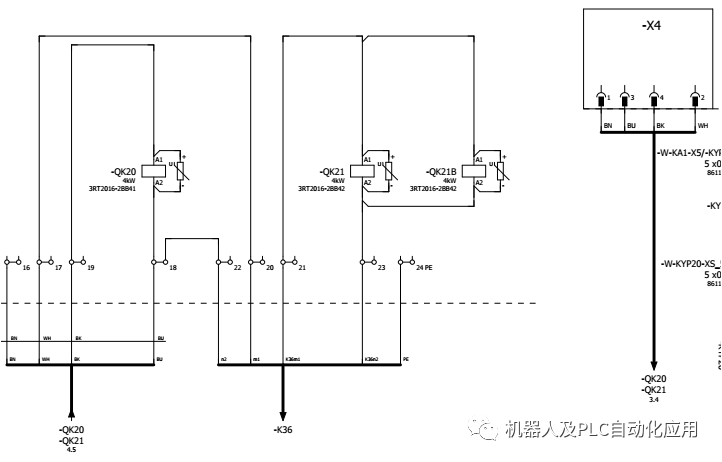
E845與E844的控制電器圖:
O_KS1_M1=842 -A842銑刀旋轉-
使用中斷程序關閉銑刀旋轉:
GLOBAL INTERRUPT DECL 2 WHEN $IN[I_關閉KS1_Ruhe] == FALSE DOKS_Abschalten()
當有E844時證明擺臂在伸出位置,這時會關閉電機旋轉.
GLOBAL INTERRUPT DECL 3 WHEN $IN[I_KS1_Arbeit] == FALSEDO KS_Abschalten()
當有E845時證明擺臂在返回位置,這時會關閉電機旋轉.
GLOBALDEFKS_Abschalten()
關閉擺臂電機
$OUT[O_KS1_KYP3V] = FALSE
$OUT[O_KS1_M1] = FALSE-A842電機旋轉-
$OUT[O_KS1_Schw] = FALSE
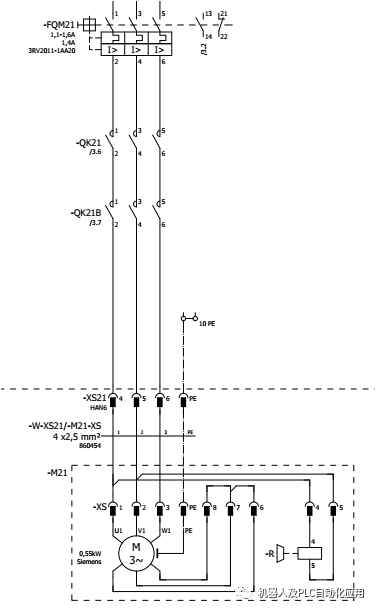
擺臂旋轉電機采用雙繼電器控制:
固定焊鉗MAKROSTEP:
-當有銑削時出現圈數故障時,會先把擺臂擺回,然后停在66步等待復位,如果復位會返回到第51部,重新銑削。
-F321-STEP在第2步
-F564,A835 都沒有好使用
F321 = EIN
Schritt 51 = F92 & !F93& A4039 & E13–激活固定焊鉗STEP需要關閉安全們E13
51步開始
-初始化變量
F122 = AUS
F321 = AUS
F322 = AUS
F323 = AUS
F324 = AUS
F325 = AUS
F326 = AUS
F327 = AUS
F329 = AUS
-初始化計數器變量
F94 = AUS
F95 = AUS
F96 = AUS
F97 = AUS
F98 = AUS
F99 = AUS
-初始化銑刀變量
F312 = AUS
F313 = AUS
bin1 ( EIN ) = 31 -給焊鉗程序號
bin3 ( EIN ) = 31 –給BOSCH程序號
T8 ( !F334 ) = -2[1/10Sek]
F334 = EIN -STEP已經開始運行
-給PLC銑電極信號
A116 = EIN
A130 = EIN
A786 = F830 給BOSCH銑電極數復位,F830區分兩種焊鉗或控制器–一般不激活
A722 = !F830-沒用用于
Schritt 52 = T8 & A4039 -0.2秒后向下
SCHRITT 52-銑刀電機預先旋轉
F334 = AUS
T7 ( EIN ) = -50[1/10Sek] -5秒檢測時間
i1 (EIN) = 0 -計數器清0
A834 = EIN -銑刀電機預先旋轉
Schritt 53 = A4039 -有使能直接去下一步
-在焊鉗不夾時銑刀電機先旋轉測試檢測開關,電機是否正常工作。
SCHRITT 53 預轉大于2圈就可以
F312 = EIN -激活M97進行預先旋轉測試
F313 = i1 > 2 -計數超過2圈后激活F313跳步
Schritt 54 = (F313 + T7) & A4039
SCHRITT 54—關閉銑刀預轉
F312 = AUS 關閉M97預先旋轉測試
t8 ( EIN ) = -100[1/10Sek]
Schritt 55 = A4039
SCHRITT 55 –檢測預先旋轉是否符合
F322 = !F313-故障有轉圈數故障
F323 = (!E842 + E843 + E844 + !E845) & !F324 & !F328
-擺臂沒在KS1BE2R位-擺臂在KS1BE2V位-擺臂在KS1SE1-R-擺臂沒在KS1SE1-V位-F323擺臂位置不正確
- F324擺臂在伸出位 - F328移動裝置在伸出位
F329 = F322 + F323 + T8 -銑刀/擺臂狀態不正常,有故障。
T7 ( EIN ) = STOP
A834 = !F322& !F323 -狀態正常會繼續轉銑刀
A835 = !F322& !F323 & F564 –F564沒有激活,此功能沒有激活
Schritt 56 = (!F322& !F323 & (E835 & F564 + !E835& !F564) + T8) & A4039
-沒有故障去56步
Schritt 72 = (F322 + F323) & !F324& !F328 & A4039
有故障回到72步
SCHRITT 56–擺臂伸出
F329 = T8 -超時故障
審核編輯:劉清
-
繼電器
+關注
關注
132文章
5320瀏覽量
148581 -
機器人
+關注
關注
210文章
28205瀏覽量
206530 -
plc
+關注
關注
5008文章
13151瀏覽量
462077 -
計數器
+關注
關注
32文章
2253瀏覽量
94354
原文標題:?KUKA機器人固定焊鉗的銑削控制V1
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
KUKA機器人問題解答
KUKA庫卡機器人伺服驅動器相關型號舉例
KUKA焊接機器人伺服電機常見故障及維修處理
庫卡機器人MGV電源模塊維修
機器人系統與控制需求簡介
KUKA機器人伺服驅動模塊維修
KUKA機器人焊鉗銑削清零方式
KUKA機器人程序中銑削清零方式
KUKA機器人銑削控制





 工商網監
工商網監
評論