 數字電源監控和遙測
數字電源監控和遙測
數字電源器件在啟動和關斷之間做什么?兩個核心功能是監督和遙測。監控是一種快速作用的安全功能,可防止損壞設備和/或負載。遙測是一項持續的質量管理功能。
在這篇文章中,我們將研究一個典型的POL內部架構,并考慮它對電源系統設計的影響。
POL 內部結構
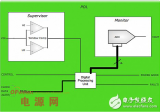
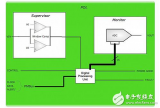
圖 1 顯示了包含三個主要模塊的簡化 POL:
Supervisor
Monitor
Digital Processing Unit
數字處理單元是大腦。(不顯示的是核心功率轉換。數字處理單元負責處理PMBus和控制輸入,并斷位POWER_GOOD和故障/。
大多數設備都有其中的幾個,但為了簡單起見,我們可以堅持輸入和輸出。
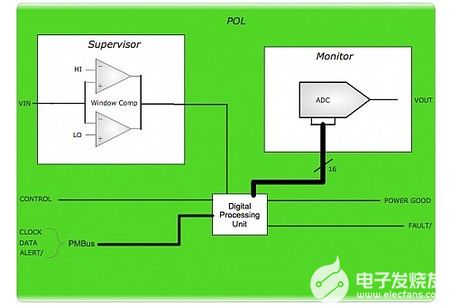
圖1.POL 結構
監督
監控是一個快速作用的單比較器或窗口比較器。通常,輸出繞過數字處理單元中的狀態機,可以直接停止電源轉換并置位FAULT/。之后更新數字處理單元,以便PMBus主機可以查詢設備的故障寄存器。
監控器的目的是保護負載和設備,因此它以一定的精度換取速度。HI/LO 值通常存儲在 NVROM 中,或由 PMBus 通過 VOUT_UV_FAULT_LIMIT 等命令進行編程。故障行為也存儲在 NVROM 中,包括重試、重試延遲等。
監測
監控是通過ADC進行的高精度測量。數字處理單元通常作為狀態機或軟件環路實現,用于輪詢ADC輸出數據并由PMBus提供。監控數據還可以用于非常精確的數字處理單元伺服回路中,以提高輸出精度。
故障
故障可能來自管理引擎或監視器。對于監控器,DAC提供比較器的基準,輸出直接饋送到FAULT/引腳。對于監視器,數字處理單元使用數字比較器或軟件條件指令向數字處理單元發送FAULT/引腳。
權衡取舍
POL 設計人員做出的權衡非常簡單。安全性決定了哪些輸入和輸出具有監控器。監控權衡涉及精度,因為ADC占用空間和功耗,以及通道數量、多路復用器等。
作為系統設計人員,必須考慮他們的系統將使用數據做什么,以及數據的準確性。例如,典型用途是:
系統啟動和調試
效率監控
能源監控
故障預測
優化(本地和全局)
精度增強(伺服)
例子
每個電源架構都是不同的,并且沒有一套通用的權衡,因此我將提供一些使用主管和監視器來發揮您的想象力的示例。此外,一旦你看到什么是可能的,你可能會發現競爭優勢。
管理引擎故障生成示例
本示例來自 LTC2974,這是一款管理四個 POL 的監控器 / 監視器器件。輸出電壓(它負責的POL)具有基于窗口比較器的監控器。
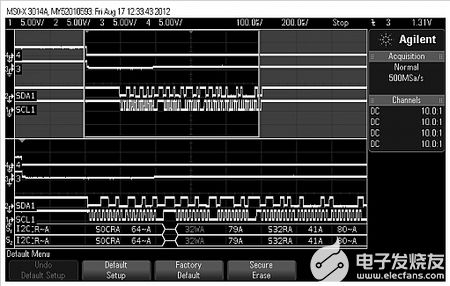
圖2.管理引擎生成的故障
跟蹤 4 是器件的 FAULT/ 引腳,跟蹤 3 是器件的 ALERT/ 引腳。我將輸出短路到地面。在此設備上,接地和故障/變低之間的延遲約為 12us。不久之后,我們也會收到警報/拉低。這些非常快,因為監控器繞過監控較慢的ADC所涉及的所有狀態機,并直接產生故障。它還停止了電源轉換。
查看 PMBus,PMBus 主機執行了警報響應地址 (ARA) 事務。地址 0 × 0C 放置在總線上,故障設備將 0 × 64 放在總線上。主機將此右移位,以獲取地址 0 × 32。然后,主機通過在總線上放置地址 0 × 32,后跟命令字節 0 × 79 來讀取故障寄存器。然后在總線上重復以地址 0 × 32 開頭,并返回兩個數據字節,狀態字為 0 × 8041。
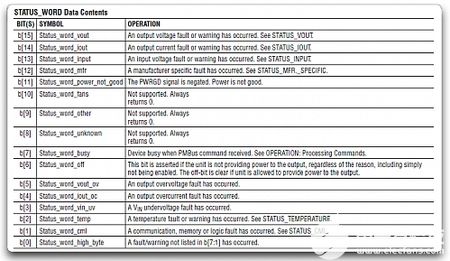
圖3.錯誤字位
查看此器件的數據表,它顯示了欠壓故障。
我們還可以使用顯示設備寄存器和狀態的外部工具來查看這一點。
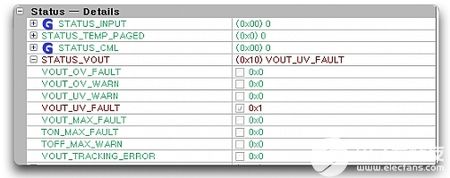
圖4.故障狀態
還記得我在第二篇文章中介紹的使用模型嗎?
管理引擎導致支持兩種模型的故障。它可以由 PMBus 或外部工具處理。
注意:我們將在以后的文章中看到它的實現,但基本上 ALERT/ 引腳與微控制器中斷相關聯。
溫度監測示例
許多器件可以通過二極管監控內部芯片溫度和外部溫度。在本例 (LTC3880) 中,我有一個通過 PMBus 監控電源軌的電路板管理器,并具有一個 LCD 觸摸屏顯示器。
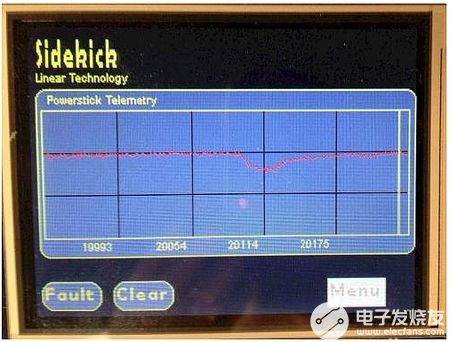
圖5.溫度監測
遙測圖顯示了內部芯片溫度。當我將手指放在設備上并且它冷卻下來時,圖表中的下降發生了。圖中的最小值和最大值分別為 30 度和 40 度。您可以看到測量非常好。
該設備將使用此溫度來保護自己,但也可用于檢測更細微的問題。如果添加 I2C溫度監控器件和PCB周圍放置傳感器,在傳感器和所有PMBus器件之間,可以得到相當好的電路板輪廓。您可以使用它通過控制負載來平衡溫度,表征不同負載下的系統,或者只是向系統操作員發送警告消息,以便他們可以更換電路板并將其送去維修。
為了提高效率,也可以這樣做。通過測量輸入和輸出電壓及電流,您可以動態計算功率效率,并通過轉移工作負載來使用這些信息進行系統優化,以使轉換器更接近其最佳效率。您還可以查找可能在問題發生之前檢測到問題的非典型模式。董事會經理通常具有通信接口,可以為您發送這些通知。
自治系統與托管系統
我想將這些性能參數放在使用模型的上下文中:
在我的第一篇文章中,我介紹了兩種使用模型:
配置和部署
監控和行動
描述這些的另一種方法是自治系統與托管系統。自主系統是指電源轉換器上電并完全獨立于 PMBus 運行的系統,與模型 1 非常相似。受管系統主動使用 PMBus,與模型 2 非常相似。
這些模型具有不同的性能影響。PMBus有自己的性能,受到400Khz(典型)總線時鐘的限制。監控性能與PMBus無關,無論是作為模擬比較器和直接邏輯實現,還是在數字處理單元中實現較慢的邏輯。
在托管系統(如 Monitor 和 Act)中,Act 部分具有與自治系統相同的性能,直到 PMBus 處于主機的決策循環中。一旦主機必須讀取遙測數據并對設備應用一些功能或參數更改,性能通常就會受到 PMBus 的限制。
受管系統性能在性質上也有所不同,因為主機必須管理多個軌,其中的數量取決于系統體系結構。假設讀取一個值并更改一個值作為響應需要 200uS(400kHz 總線)。假設我在主機的控制回路中有 10 個電源軌,現在我有 2mS。現在,添加一些我2用于監測溫度的C芯片。在主機中添加與PMBus無關的其他功能,最終系統的響應時間比數字處理單元慢。此外,如果您以 100kHz 運行總線,因為一些較慢的 I2C設備,事情變得更慢了。
正是出于這個原因,使用了混合使用模型,其中關鍵功能全部由數字處理單元(和快速監控器)處理,不依賴于PMBus,而能耗和故障預測等更高級別的功能由PMBus主機處理。
出于同樣的原因,當不需要更高級別的功能時,設備本身就可以正常工作,而PMBus是配置工具的推動者。特別是,PMBus工具對于電路板啟動非常有用。工具以儀表板格式顯示系統所有軌的狀態:遙測、故障和設置。
回顧
大多數數字電源設備都有監控器和監視器。我將主管描述為快速作用的安全裝置,將監視器描述為遙測的采樣裝置。這是一種方便的分類方法,但要小心術語,尤其是關于主管和故障的術語。有時,“Supervisor”一詞應用于使用來自監視器的數據的故障生成技術,然后它通常比比較器具有更大的延遲。
這沒有錯。如果設備已經需要監視器,并且不需要超快地發生故障,為什么還要為不需要的比較器和邏輯付費呢?只需閱讀數據手冊并仔細查看其框圖,即可了解器件的行為方式。芯片設計師非常擅長做出權衡,但只有您可以確認它們適用于您的應用。但一般來說,你會發現如果是安全問題,就會有比較器,如果是精度問題,就會有高精度ADC。
雖然主管的使用非常明顯,但顯示器有時被低估了,直到您希望擁有它們。很容易專注于調整電源軌尺寸、考慮瞬態響應和所有其他模擬行為,而不考慮系統級機會。但是,一旦您擁有 PMBus 及其所有控件、用于存儲設置的 NVMRAM 和用于配置的軟件工具,請考慮您可以如何處理實時數據。只要多付出一點努力,您就可以找到競爭優勢。您也不必預先實施所有固件。固件的好處是您無需更改硬件即可升級它。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17585瀏覽量
249488 -
顯示器
+關注
關注
21文章
4948瀏覽量
139820 -
POL
+關注
關注
0文章
81瀏覽量
27441
發布評論請先 登錄
相關推薦


一周推薦:Analog Devices數字電源系統管理 (PSM) 器件
用于負載點應用的遙測技術
數字電源器件另一端的精度重要嗎?
航天級IC如何改進遙測電路設計
數字電源解決方案,基站電源設計
數字電源監視系統及其遙測技術的淺析

雙通道13Aμ模塊穩壓器,用于遠程監控和控制電源





 工商網監
工商網監
評論