 簡單的電路提供可調節的CAN級差分輸出信號
簡單的電路提供可調節的CAN級差分輸出信號
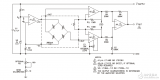
控制器局域網(CAN)串行總線拓撲允許設備和微控制器在不使用主機的情況下相互通信。它具有無仲裁傳輸的特點,在每個設備節點上放置一個控制器和一個主機處理器,消除了將設備與主機互連所需的更復雜的線束。
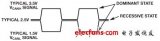
通過使用CANH和CANL線路上的信號,CAN總線有兩種狀態:隱性和顯性。如果差分電壓大于0.9 V,則總線處于顯性狀態,如果差分電壓小于0.5 V,則總線處于隱性狀態。 CAN收發器(如ADM3051)將CAN控制器連接到物理層總線。

圖1.CAN總線信號和狀態。
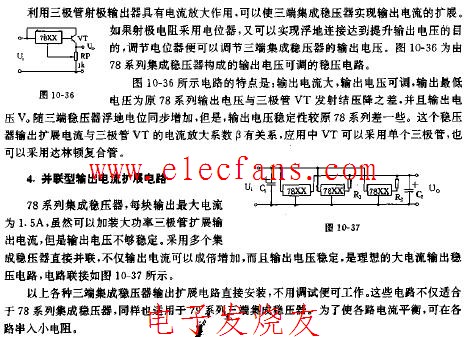
CAN收發器可以使用自動測試設備(ATE)或工作臺上的直流信號進行表征。圖2所示電路使用來自函數發生器的方波信號向收發器提供可調CAN信號。選擇AD8138高速差分放大器是因為它具有寬帶寬和低失真。輸出端的直流電平轉換器可以調節輸出信號的差分電平,同時保持其峰峰值電平。幅度和頻率通過信號發生器進行調整。

圖2.AD8138驅動CAN收發器。
該電路采用5 V單電源供電,配置為單位增益單端轉差分放大器,共模設置為中間電源。R1、R2和R3構成直流偏置電路,將輸出信號調節到CAN電平。與R2相比,通過保持R4和R5小,電位計可以方便地調節兩個輸出信號之間的差值,而不會顯著影響它們各自的幅度,從而為DUT提供具有可變共模電平的CAN信號。由于R1和R3相等,因此在調整R2時,輸出的交流共模也不受影響。R4和R5與R2一起構成AD8138放大器輸出端分壓器的一部分。為R4和R5選擇盡可能小的值,以最小化輸出端的衰減以及調整R2對每個輸出峰峰值電平的影響。如果R2短路,R4和R5也將提供最小負載以保護放大器的輸出。電容C1和C2將直流偏置與放大器的輸出共模隔離開來。這些電容還與電阻偏置網絡形成一個高通濾波器;其截止頻率為:

其中 C = C1 = C2,以及RL是負載或 DUT 輸入電阻,通常約為 20 kΩ 至 30 kΩ。
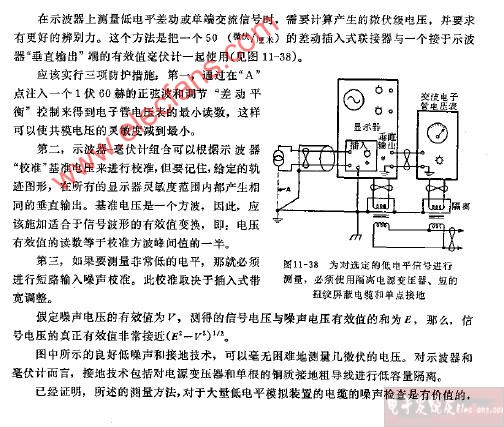
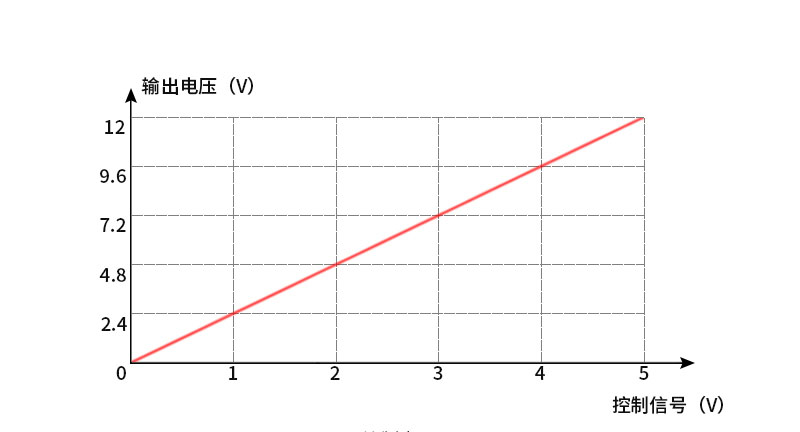
為避免方波輸出信號失真,應選擇盡可能大的C 1和C2,以使輸入信號頻率是最壞情況下截止頻率的10倍,其中R2||RL是最低限度的。例如,要實現V燦和V坎爾電平如圖3(a)所示的信號,R2必須至少為 700 Ω,假設沒有輸出 (DUT) 加載效應。0.1 μF或1 μF耦合電容可容納1 MHz信號。圖3(b)顯示了R2如何調整差分輸出電平。
將這些輸出信號用作 V燦和 V坎爾收發器的輸入使臺式示波器測量能夠表征接收機參數,例如傳播延遲、上升時間和所需頻率的閾值。

圖3.VCANH 和 VCANL 輸出。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7489瀏覽量
151051 -
控制器
+關注
關注
112文章
16203瀏覽量
177414 -
CAN總線
+關注
關注
145文章
1936瀏覽量
130631
發布評論請先 登錄
相關推薦
基于嵌入式系統可調節輸出電壓的高效電源設計
用LMH6703這款芯片做了一個一級差分放大電路,相位延遲波動怎么解決?
采用簡單電路提供可調CAN電平差分輸出信號






 工商網監
工商網監
評論