 電子系統中用于模擬接口的超級放大器和濾波器
電子系統中用于模擬接口的超級放大器和濾波器
一種普遍的觀點認為,數字電路只是自然工作,但模擬電路很難實現。這種古老的信念是有道理的——模擬接口是一門需要培訓的專家學科。此外,避免問題總是比以后嘗試解決問題更好。這就是為什么我們應該利用經驗豐富的模擬工程師作為反射執行的一些基本概念。本應用筆記提供了一些關于放大器和濾波器的基本提醒和概念,供您在設計時考慮。
介紹
作為孩子,我們學會了分享,在這個過程中,我們了解了部分。許多父母教給孩子這一點,讓一個孩子切餡餅或蛋糕,然后讓另一個孩子先挑一塊。我們可以肯定,我們非常小心地使這些碎片的尺寸都相同。
我們想起了生活中的一個很好的教訓,“比例很重要。我們在日常生活中比較不同路線之間的距離或兩種食物的味道時,會使用比率。(是的,媽媽的廚藝更好,或者我們太小了,不知道有什么區別?
從兒童、餡餅和蛋糕轉向模擬工程設計,我們意識到比率(相對數量、比例、百分比、份額、零件和分數)都是模擬設計中的重要度量。當我們忽略這些比例和關系時,我們會將人為錯誤引入到必須是一個精確的過程中。本應用筆記分享了一些關于放大器和濾波器的模擬概念,這些概念將有助于減少“人為”誤差的幾率并改進模擬設計。
信噪比 (SNR) 的注意事項
串擾和信噪比(SNR)表示為比率,即好與壞的比例。如何提高信號的信噪比?如果特定電路貢獻了相當大的噪聲,我們有兩個基本選擇:第一,以某種方式降低噪聲,第二,在好信號通過級之前增加其幅度。圖 1 說明了該概念。
圖1.電源噪聲被添加到信號中。
在應用筆記4992“減少人為錯誤的可能性:第1部分,電源和接地”中,我們重點討論了電源噪聲、接地和布局。在這篇配套文章中,我們將研究如何控制信號路徑中的噪聲。我們將在各個電路階段討論信號和噪聲的特性。
開關電源的主要噪聲源是諧波嗎?如果電源噪聲為50kHz或更高,并且我們想要的信號為1kHz,則濾波可能是可行的。如果我們接下來要進入ADC,抗混疊濾波器可能會有所幫助。
降低噪音
經驗豐富的電路設計人員會評估哪些可能性?最簡單的解決方法是在添加噪聲之前放大信號。是的,足夠簡單,但不幸的是,這種解決方案通常無法使用,因為輸入信號已經存在噪聲。所以現在我們發揮創造力,考慮如何將信號與噪聲分開?我們可以使用高通、低通或帶通濾波器嗎?我們能否根據幅度、限幅、噪聲消隱或取芯進行區分?我們可以在引入噪聲之前使用預加重,在引入噪聲之后使用去加重來提高信噪比嗎?我們是否可以根據時間進行區分,即以最小的噪聲水平或干擾時間進行采樣?我們是否可以對時間平均,或者如果信號是重復的,我們是否可以對周期求和或兩個、三個或更多維度的平均值?
從組件功能轉向,考慮整個系統。系統目標是什么?如何使用該系統?人類的感官將如何與系統提供的信息相互作用?簡而言之,考慮我們可以收集的所有信息。
上述問題反映了豐富的設計經驗和知識。這正是聰明的公司聘請經驗豐富的工程師并指導新工程師建立堅實的設計團隊的原因。
我們可以用一個例子來說明思考和發展過程。第一個觀察發現,系統的輸入端有一個高增益運算放大器。運算放大器為模數轉換器(ADC)供電。信號上偶爾會出現較大的噪聲脈沖,這會導致運算放大器飽和。運算放大器的恢復時間可能長達毫秒或秒。我們將如何處理這個問題?由于每個案例都會有所不同,我們只會提出問題并指出可能的解決方案。
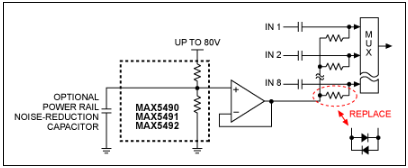
首先,收集數據以嘗試了解正在發生的事情。我們可以修復源頭嗎?不。因此,我們認為噪聲峰值是不可避免的。我們對它的上升時間幅度和持續時間了解多少?如果尖峰非常快且狹窄,而我們想要的信號相對較慢,我們可以通過濾波將它們分開嗎?我們能否檢測到尖峰并打開串聯開關以消除主路徑中的尖峰?我們是否可以添加一對像靜電放電(ESD)結構這樣的二極管來削波任何高于V的信號抄送還是地下?我們能否從應用筆記4344“軌道分離器,從亞伯拉罕·林肯到虛擬地面”中學習?在該應用筆記的圖2中,我們創建了一個介于V之間的電壓抄送并在所需信號的平均信號電平處接地。如果將串聯電阻替換為一對背靠背二極管(圖 2),則信號尖峰將限制在電壓 ±硅二極管(紅色虛線)為 0.6V,肖特基二極管為 ~±0.3V(綠色虛線)。硅二極管的反向恢復時間可以在一百到幾百納秒之間。肖特基二極管對于小信號二極管的開關時間為~100ps,但由于其工作物理特性,沒有反向恢復時間。二極管也可以放置在運算放大器反饋環路中,以降低尖峰期間的增益。圖 3 顯示了限制的效果。
圖2.用一對背靠背二極管代替串聯電阻。
圖3.二極管限幅器效應,±0.3V肖特基,±0.6V硅。
圖3可能有助于緩解運算放大器飽和和恢復時間,但這足夠嗎?我們可以添加電路來消除噪聲脈沖,如圖4所示。
圖4.噪聲脈沖消隱。
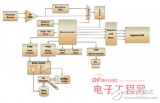
消隱電路的框圖如圖5所示。
圖5.噪聲消隱框圖。
從圖5中消隱的基本概念來看,可以添加更多的優雅。如果源為低阻抗,則可能不需要輸入緩沖器。R1和R2設置直流值,如上文應用筆記4344“軌道分離器,從亞伯拉罕·林肯到虛擬接地”所示。或者,輸入信號可以是交流耦合到相同的電壓,或者可以長期平均輸入信號以產生該電壓。主信號路徑是從輸入緩沖器通過RC延遲、多路復用器、緩沖器和低通濾波器到ADC。MAX11203 ADC具有4個由SPI接口控制的通用輸入或輸出(GPIO)端口。GPIO設置為MAX313多路復用器的AIN1導通,AIN2關斷。我們高通或區分噪聲脈沖。雙通道或窗口比較器輸出將處于活動狀態,而正向或負方向的噪聲脈沖超過0.3V。異或門控將邏輯反相至多路復用器,從而關閉主路徑并接通直流電壓。RC延遲還會延遲主路徑足夠長的時間,以使比較器路徑改變狀態。如果RC延遲使信號帶寬降低太多,則可以使用LC延遲線代替。
圖5所示的輸入緩沖器可以使用MAX4209儀表放大器,盡管增益很高,但失調漂移極低。
圖5所示ADC之前的濾波器可以控制信號帶寬,以滿足奈奎斯特抗混疊、降低噪聲或軟化殘余消隱毛刺。
結論
每個電路和系統中的噪聲和干擾控制都不同。值得慶幸的是,物理定律占了上風,工程師必須努力消除噪音。該討論試圖幫助設計人員在設計開始之前和設計過程中預測噪聲和干擾問題。產品投入生產后,修正的選擇受到嚴重限制。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17595瀏覽量
249526 -
放大器
+關注
關注
143文章
13553瀏覽量
213123 -
濾波器
+關注
關注
160文章
7732瀏覽量
177703
發布評論請先 登錄
相關推薦
模擬濾波器向導設計工具為濾波器選擇正確的放大器
濾波和濾波器
電源設計實用教程——電子系統的電源電路設計

減少人為錯誤的機會:用于模擬接口的超級放大器和濾波器





 工商網監
工商網監
評論