 焊接機器人如何進行焊縫追蹤?
焊接機器人如何進行焊縫追蹤?
焊接機器人焊縫追蹤系統作用
現在勞動力成本在不斷的增加,給企業帶來了很大的壓力,隨著我國科技的不斷發展,工業機器人技術得到了廣泛的應用,在汽車制造業中,焊接機器人是不可缺少的重要生產工具。
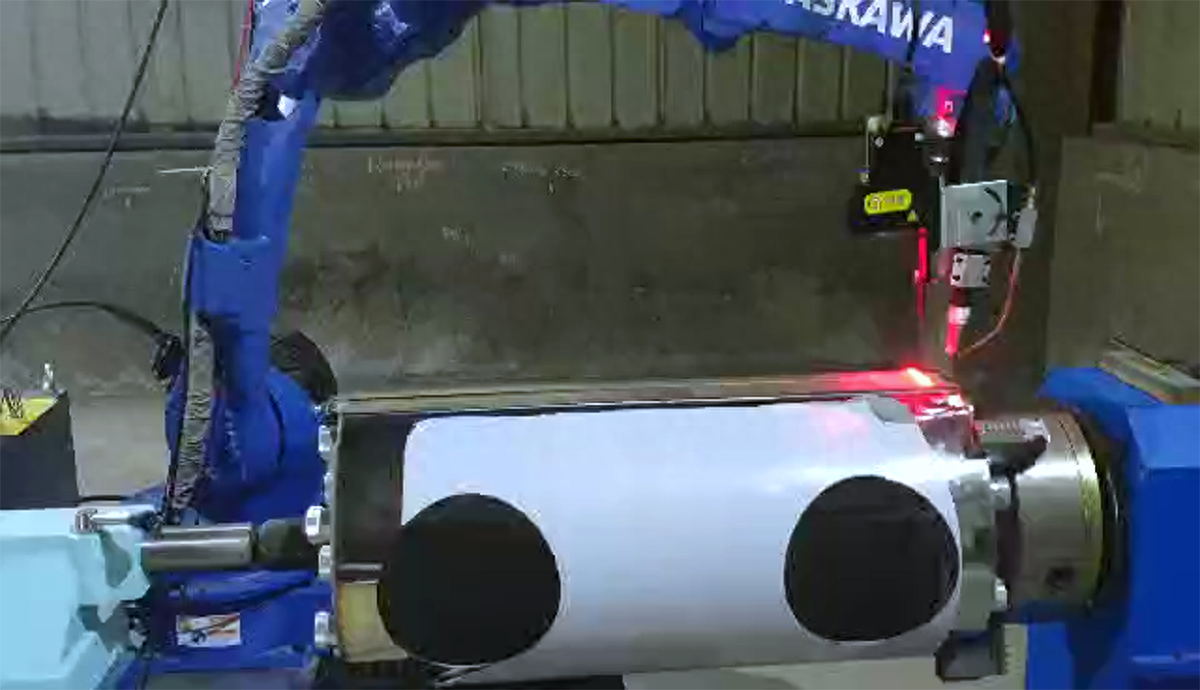
利用激光焊縫跟蹤系統,可以引導焊接機器人尋到焊接縫隙,并引導完成焊縫焊接工作。可檢測0.1mm細縫,水平誤差<0.04mm,高度誤差<0.018mm,適合精密焊接。激光焊縫跟蹤傳感器配合焊接機器人使用等于是給機器人裝上了眼睛,可以正確引導機器人進行焊接定位。<>
焊接機器人焊縫追蹤工作原理
焊接機器人焊縫跟蹤尋位基本工作原理就是示教再現,即由用戶導引機器人,一步步按實際任務操作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿態、運動參數、焊接參數等,并自動生成一個連續執行全部操作的程序。完成示教后,只需給機器人一個起動命令,機器人將會按示教動作,一步步完成全部操作,實際示教與再現。
焊接機器人焊縫追蹤步驟
接下來專業焊接機器人生產廠家無錫金紅鷹將為大家詳細介紹機器人焊接自動尋位具體操作步驟:
(1)建立工件坐標系;
(2)將工件劃分為田字形,設置工件的長L、寬W,以及長、寬方向上的單元格數m、n和尋位高度z1;
(3)確定尋位路徑,所述尋位路徑包括多個直角拐點和平行于工件的長或寬所在直線的尋位路段且不與單元格的任一邊界線重合;尋位路徑分為用于獲取工件單元格橫向信息的橫向尋位路徑和用于獲取工件單元格縱向信息的縱向尋位路徑,橫向尋位路徑和縱向尋位路徑均呈“S形”或“2形”;
(4)計算工件坐標系下橫向尋位路徑和縱向尋位路徑中起點、終點以及各直角拐點的坐標值,得出尋位路徑的坐標軌跡;
(5)焊接機器人根據尋位路徑的軌跡坐標分別進行橫向尋位和縱向尋位,記錄激光傳感器輸出信號發生變化時機器人的坐標即經過的網格邊緣坐標;
(6)根據步驟(5)中記錄的網格邊緣坐標確定網格輪廓;
(7)根據網格輪廓進行焊接路徑規劃,生成焊接準備點和焊接規避點,焊接規避點;
(8)按照步驟(7)中規劃的焊接路徑執行焊接任務。
審核編輯:湯梓紅
-
機器人
+關注
關注
210文章
28200瀏覽量
206514 -
焊縫跟蹤
+關注
關注
0文章
188瀏覽量
10429 -
焊接機器人
+關注
關注
16文章
319瀏覽量
14916
發布評論請先 登錄
相關推薦
如何避免焊接機器人焊縫偏移

焊接機器人拖拽軌跡怎么設置

焊接機器人示教模式怎么設置

焊接機器人焊縫尋位跟蹤系統的作用
焊接機器人怎么調焊接速度

焊接機器人焊接質量下降怎么辦

焊接機器人調試技巧有哪些

焊接機器人的應用領域有哪些
六軸焊接機器人的操作流程

焊接專機與焊接機器人哪個好

焊接機器人自動尋位原理是什么
焊接機器人的工作原理與優勢分析

焊接機器人焊縫偏移的原因與解決方案
詳解機器人激光焊接機和激光焊接機在設計和應用上區別

焊接機器人配合變位機的優點






 工商網監
工商網監
評論