") 如何使用ST MotorControl Workbench來啟動發(fā)動機
如何使用ST MotorControl Workbench來啟動發(fā)動機
2.1安裝MotorControl Workbench↑
對于 MotorControl Workbench 的安裝,請按照教程上一部分中提到的步驟進(jìn)行操作。
2.2啟動第一個應(yīng)用↑
由于使用的包是P-Nucleo-IHM03,因此必須選擇使用的適當(dāng)板。
這樣做的第一步是單擊“新建項目”并選擇NUCLEO-G431RB作為控制板,選擇X-NUCLEO-IHM16M1作為電源板,然后單擊“確定”,如下圖所示:
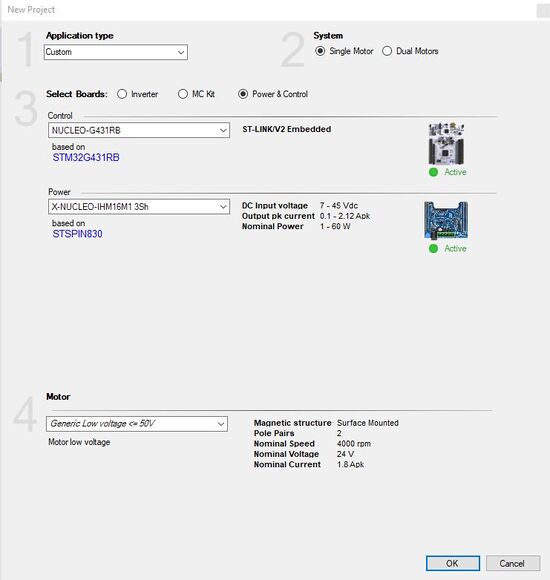

值得一提的是,在本教程中,使用了包 P-Nucleo-IHM03。請確保從您使用的套件中選擇合適的板。
選擇完包裝板后,會出現(xiàn)另一個窗口,允許用戶檢查詳細(xì)信息并設(shè)置不同特性的值。
信息
建議檢查一些不同的值,并嘗試使用電源控制和控制板的用戶手冊來理解它們。
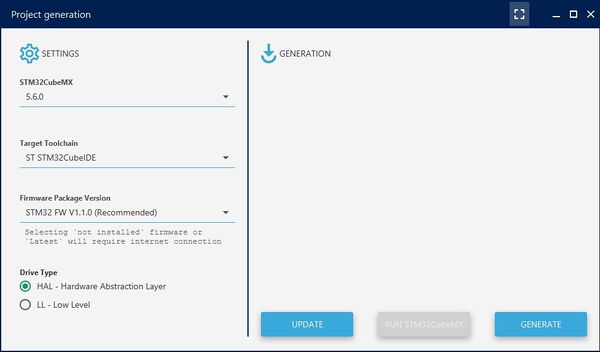
稍后,只需單擊下圖中顯示的生成文件按鈕,并將項目保存在適當(dāng)?shù)哪夸浿小?然后會出現(xiàn)一個允許選擇要使用的 IDE 和驅(qū)動器類型的窗口。只需點擊Generate,軟件完成生成 .ioc 文件后,不要更改任何參數(shù),只需點擊Run STM32CubeMX。 .ioc 文件現(xiàn)在已打開,下一步是簡單地在 STM32CubeIDE 中生成代碼,不要忘記更新項目管理器部分中的項目信息。

信息
CORDIC 是一種硬件加速器,旨在加速某些數(shù)學(xué)函數(shù)的計算,特別是
與軟件實現(xiàn)相比,三角函數(shù)和雙曲線函數(shù)。
代碼生成后,唯一要做的就是連接電池組和調(diào)試程序。
該程序已安裝在命令板上,一旦單擊用戶按鈕,引擎就會正確旋轉(zhuǎn)。
2.3啟動電機并延時旋轉(zhuǎn)發(fā)動機↑
在這部分中,目標(biāo)工作是啟動電機并以用戶設(shè)定的延遲使其停止。
在代碼生成之前,第一步與前一部分相同。
然后,將以下代碼添加到主文件的 while 循環(huán)中:
while ( 1 ) { MC_StartMotor1 (); HAL_Delay ( 2000 ); MC_StopMotor1 (); }
3控制電機的方向
在這一部分中,電機控制是基于方向控制的。
它分為兩部分,第一部分是 MotorControl Workbench 的管理,第二部分涉及編程部分。
3.1更改 MotorControl Workbench 參數(shù)↑
啟動 MotorControl Workbench 后,選擇合適的板并打包。稍后生成前面部分中介紹的項目。
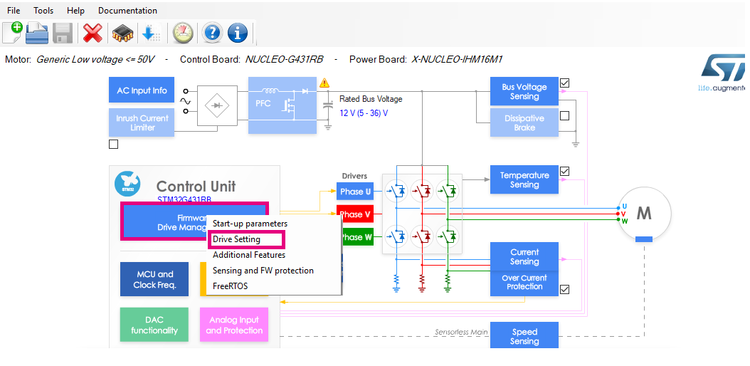
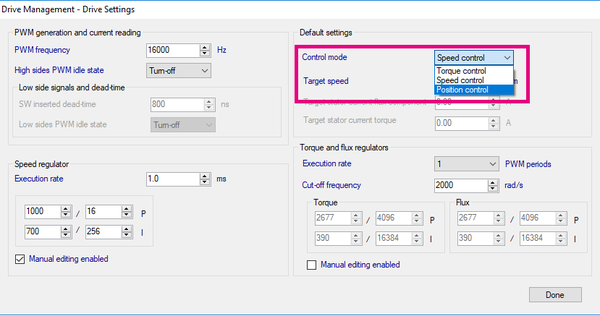
生成項目文件后,單擊Firmware Drive Management,然后選擇Drive Setting。 出現(xiàn)一個彈出窗口,要控制電機的方向,請從默認(rèn)設(shè)置部分選擇控制模式的位置控制。然后,生成代碼,如啟動第一個應(yīng)用程序部分所示。
3.2管理編程代碼部分↑
現(xiàn)在,要管理電機的方向,請在聲明部分 添加以下代碼:
整數(shù) x = 0 ;
稍后在While循環(huán) 中添加以下代碼:
while ( 1 ) { MC_StartMotor1 (); x = x + 0.175 ; MC_ProgramPositionCommandMotor1 ( x , 0 ); }
x是我們想要引導(dǎo)電機的角度,此處設(shè)置為 0 的第二個變量表示設(shè)置為到達(dá)所需位置的時間。
在此示例中,我們希望電機在循環(huán)的每個循環(huán)中將角度 x 增加 0.175 以保持移動。
添加完代碼后,構(gòu)建并調(diào)試生成的程序,可以看到電機正在改變方向。
現(xiàn)在你可以:
使用 MotorControl Workbench 啟動您的第一個應(yīng)用程序
生成電機控制代碼
旋轉(zhuǎn)引擎
指定開始和停止之間所需的延遲
改變方向
-
發(fā)動機
+關(guān)注
關(guān)注
33文章
2437瀏覽量
69167 -
ST
+關(guān)注
關(guān)注
32文章
1129瀏覽量
128829
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論