 如何有效地設計和優化激光雷達系統的TIA接口
如何有效地設計和優化激光雷達系統的TIA接口
作者:Noe Quintero and Tony Pirc
在本文中,我們將討論跨阻放大器(TIA)的各種輸入耦合選項的影響,并闡明容易被忽視的后果。 對于每種情況。目的是幫助工程師有效地設計和優化 激光雷達系統的 TIA 接口。我們將在以下情況下重點介紹設計挑戰 將高增益光學檢波器耦合到 TIA 輸入。
激光雷達輸入不是一個微不足道的話題,而且會有很多活動部件 這個過程。信號鏈將根據哪種設計而有所不同 您選擇的,因此在選擇 最適合您的項目。
激光雷達與你
飛行時間 LIDAR 接收器信號鏈具有一系列設計權衡, 可能會影響成像系統的性能。TIA與其探測器之間的接口是這一挑戰的一部分。這尤其 對于具有多通道開關的跨阻放大器,情況為真。
激光雷達接收器構建模塊
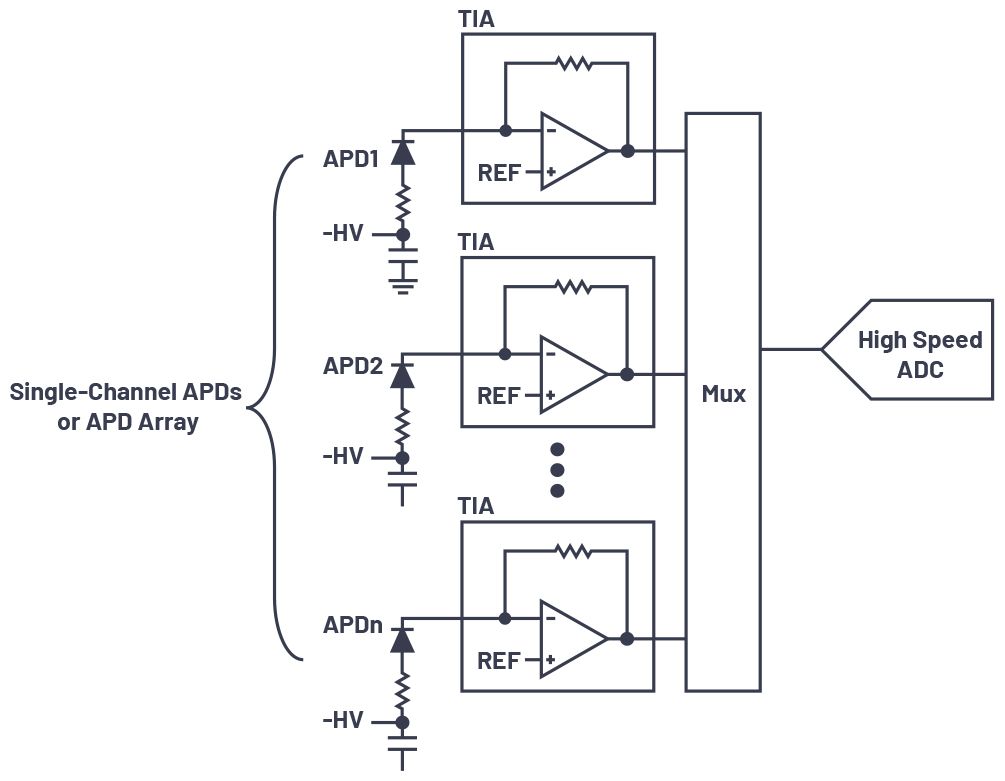
飛行時間激光雷達系統由發射信號鏈和 接收信號鏈。發射部分以 對象,接收部分測量該脈沖的振幅和性質。 光從透射到檢測所需的時間告訴您光傳播了多遠。在最基本的層面上, 接收信號鏈由光電探測器、TIA 和模數轉換器組成 轉換器(ADC),如圖1所示。對于多通道應用,多路復用器 用于減少 ADC 的數量。當光子撞擊光電探測器時,它 產生電流,由 TIA 轉換為電壓。然后這個電壓是 由ADC量化為數字值。量化器的另一個流行選擇是 比較器和時間位數轉換器(TDC),如圖2所示。這些貿發局 系統的成本和功耗降低了一個數量級,同時權衡成本更低 系統性能。此外,TDC 通常不使用多路復用器 但可以實現以減少TDC和比較器的數量。
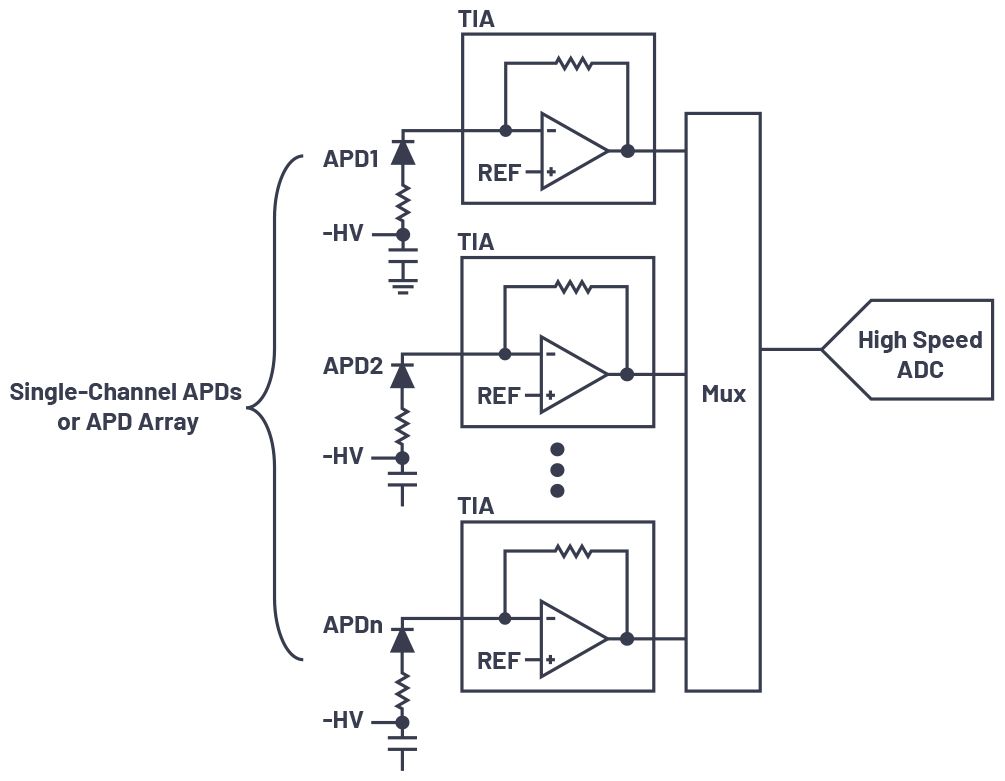
圖1.由ADC量化的激光雷達接收器信號鏈。
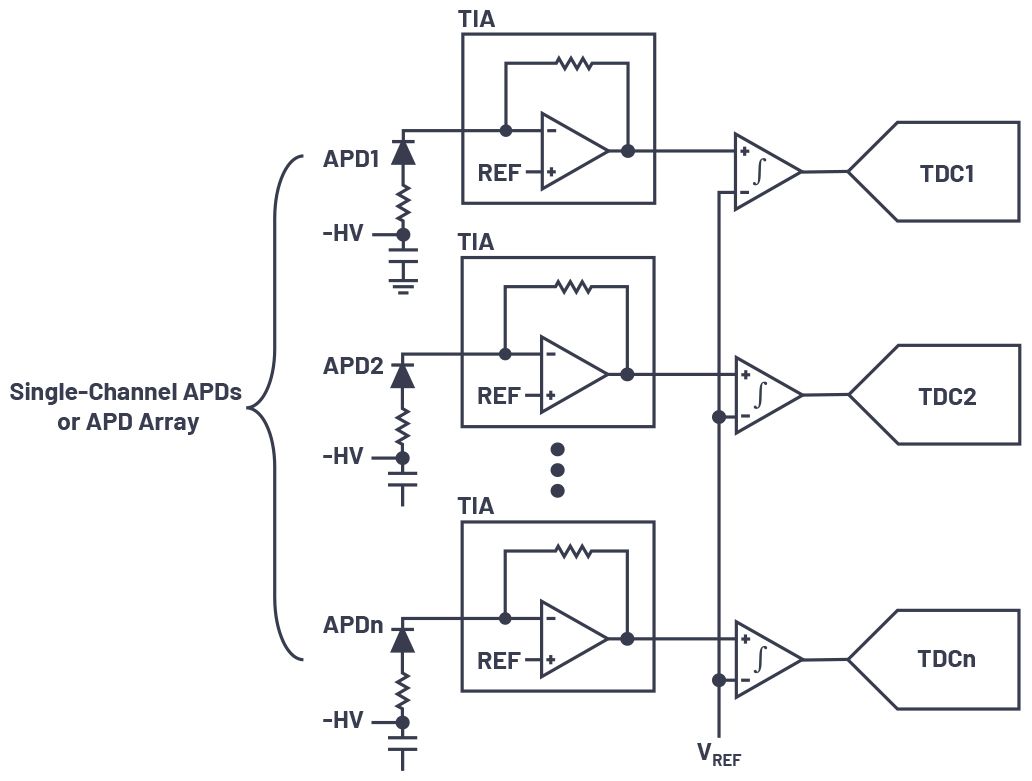
圖2.由TDC量化的激光雷達接收器信號鏈。
有三種主要類型的探測器。光電二極管是檢測器 將光子轉換為電子,但它們不提供光學增益,也不受歡迎 這些應用的選擇。激光雷達系統中流行的探測器是雪崩 光電二極管。APD是反向偏置直至擊穿的光電二極管 的結點,有利于獲得光增益。第三種類型的探測器是單光子雪崩二極管(SPAD)。SPAD反向偏置,具有 擊穿電壓與第二個更高電壓之間的過偏置電壓 與SPAD保護環相關的擊穿電壓。在這種偏差下,單次充電 注入耗盡層的載流子可以觸發自我維持的雪崩, 導致探測器處有數千個虛擬增益。似乎SPAD是 由于它們的敏感性,將是自然的選擇。然而,激光雷達系統 必須應對許多現實世界的后果,太多的收益將飽和 接收鏈太容易了。此外,額外的增益伴隨著額外的噪聲,稱為 噪聲因數過高。ENF與偏差呈指數相關,并且 增益過大會使檢波器的信噪比(SNR)變差。幸 APD是一種快樂的媒介,為這個空間提供了足夠的光增益,但不是太。 很多易恩孚會對信噪比產生負面影響。
當光子撞擊APD時,在結處產生電子空穴對。 APD的高電場就像彈弓一樣加速電子 敲掉更多的電子。這增加了釋放的電子數量 每個接收到的光子。這種效應稱為雪崩效應,它增加了一個 乘法因子(M 因子)。這種增益依賴于偏差,可以讓我們 看到較弱的信號,因為TIA通常是SNR的限制因素 由于其本底噪聲。目標是匹配下一階段的本底噪聲 在信號鏈中。在這種情況下,通過提供足夠的 TIA 本底噪聲來匹配 APD中的增益略微主導信號鏈噪聲,以提供最佳的SNR 系統。這種噪聲匹配概念廣泛應用于許多信號鏈 其中傳感器本底噪聲不是限制因素。在實踐中,這種增加 在接收器性能轉化為擴展的檢測范圍。另一個 APD的重要優點是飽和恢復速度快。同樣,TIA 是 此限制因素和 LIDAR 特定的 TIA 旨在降低飽和度 避免使激光雷達系統失明。APD 的唯一缺點是它們 相對較高的偏置點(數百伏)和溫度系數 與之相關。
激光雷達對TIA有獨特的要求。低電流噪聲和高帶寬 是所有光學應用的典型應用。但是,低功耗是必要的。系統的功率預算可能會很快受到壓力,因為當前的系統 具有 64 個或更多 TIA APD 通道。因此,需要低功耗模式 當 TIA 未在使用時。此外,這些設備需要快速喚醒以優化其功率預算。現代激光雷達TIA的另一個要求是鉗位 用于飽和事件以及平衡和權衡折合輸入噪聲的電路 和帶寬。普通光信號鏈之間的一個主要區別 而激光雷達就是環境。在光纖應用中,系統是封閉的,并且 非常穩定。然而,在激光雷達中,我們有太陽要應對,以及其他 激光雷達系統。太陽可能導致直流輸入使接收鏈飽和 線性范圍。這是工程師必須克服的首要挑戰之一 用于設計這些系統。不幸的是,解決方案并不容易,而且將是 本文已解決。
輸入交流耦合注意事項
讓我們探索一種簡單的方法來阻擋直流信號,以及許多工程師的方法 嘗試實現但收效甚微:連接交流耦合電容器 在 APD 到 TIA 之間。通過放置電容器,我們可以減輕直流效應, 但這帶來了一系列新的挑戰。
RC 權衡
首先,在TIA輸入端增加一個交流耦合電容還需要 將直流路徑連接到檢測器。通過放置電阻器,RB,APD的偏見 可以設置點,允許您將 TIA 輸入與 C 交流耦合在,如 圖3.你對這個偏置路徑所做的一個犧牲是它創建了一個并行路徑 使 APD 電流流過。此并行路徑將對 APD的增益,因為它的信號將被共享。此 APD 增益的大小 性能下降取決于 TIA 輸入阻抗與 TIA 輸入阻抗之間的比率 為 R 選擇的值B.此外,C在對電路有影響時 輸入受到來自APD的電流的影響,在電容器上產生電壓。 這種效應是由于電容器的積分電流特性,其中 電壓是電流隨時間和電容值的函數。目標是 制作 C在足夠小以盡量減少充電影響,但又足夠大以允許 它(具有足夠低的阻抗)以目標頻率傳遞信號。在 其他詞,如果 C在太大,那么放電需要更長的時間,但如果C在太 小,你會丟失一些信號,因為它上的壓降(或失真 如果脈沖與電容的相對時間尺度較長)。這些中的任何一個 影響將嚴重損害信號鏈。
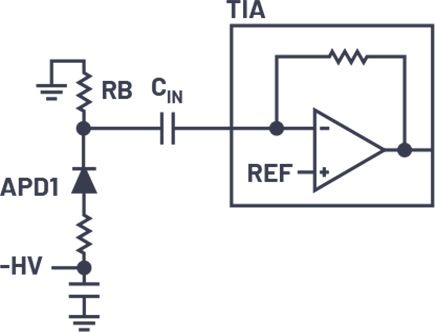
圖3.RB需要交流耦合 TIA。
尺寸調整 RB和 C在
讓我們說明如何調整 C 的大小在太小會損害您的滿量程測量:在 200 MHz,一個33 pF電容看起來像24 Ω,它產生一個分壓器,具有 R在(LIDAR TIA通常為幾百歐姆),占10% 偏離信號的實際值。對信號的10%打擊可以輕松消除硬質 為優化光學設計等其他領域而進行的工程工作。這 這種交流耦合方法消除直流的缺陷在確定尺寸時變得明顯 RB.RB與 TIA 輸入阻抗相比應較大,以防止 增益衰減,但足夠小,不會影響飽和恢復。 選擇 RC 時間常數的不可能平衡因 檢測器的輸入信號是單極性的。方波性質 輸入脈沖在此RC上取平均值,并將消除TIA的動態范圍。 此外,TIA 可能會向 C 充電在當頻道切換或 使用輸出多路復用。例如,對于 LTC6561,TIA 的輸入 有源通道標稱值為1.5 V。當通道處于非活動狀態時,電壓 輸入降至0.9 V。當在兩者之間插入交流耦合電容器時 檢測器和TIA的輸入,電容必須充電回1.5 V,以便 通道再次變為活動狀態。圖4顯示了通道開關與輸入耦合電容相比的多通道系統性能下降。注意 輸出多路復用時間(OMUX)受到的影響與通道切換類似 因為它在內部以相同的方式禁用輸入。充電時間 將由第一級RT電阻器復合,該電阻器通常在訂單上 數十千歐,因為在這種情況下控制回路斷開。一個類似的 在 TIA 中發生關斷輸入級以節省 權力。輸入還必須充電到其工作點,并且將具有 長時間常數才能上電。
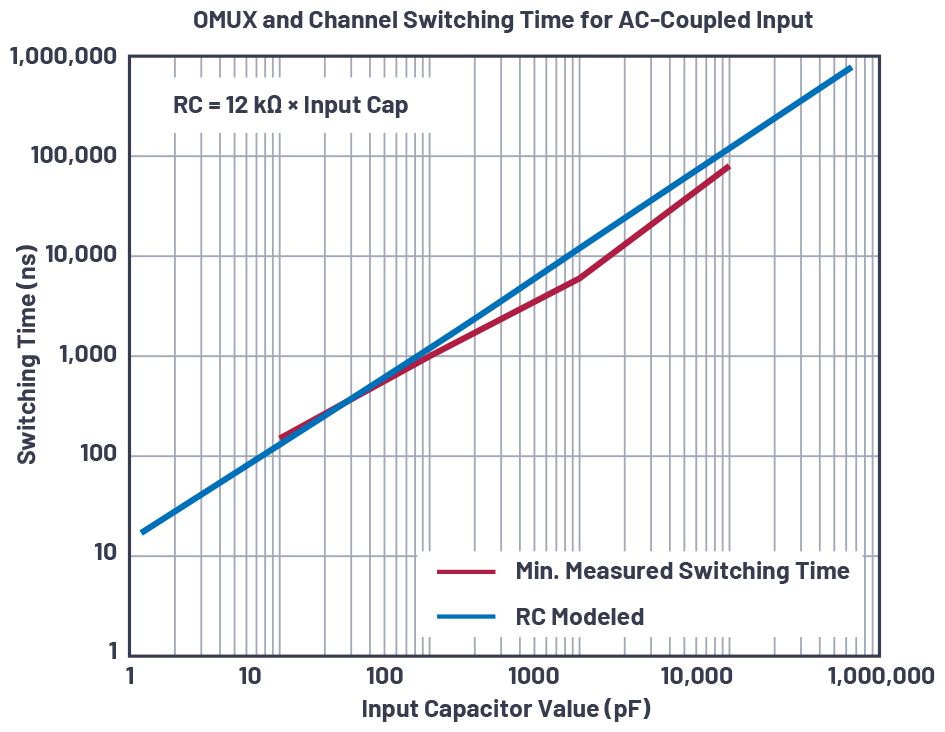
圖4.由于交流耦合輸入引起的OUX和通道切換時間圖。RB= 12 kΩ。
TIA 飽和注意事項
在這個洞里挖得更深,飽和度恢復將是最后的釘子 棺材。圖 5 顯示了 C 時的輸出在暴露在高輸入電流下。 10 mA脈沖對交流耦合TIA的影響,其中RB為 2.2 kΩ,C在是 100 pF,清晰顯示高電流后的兩個不同工作區域 脈沖事件。在 5 ns 的 10 mA 輸入脈沖之后,交流電容器的負載過重 充電,TIA 輸出軌接地。此輸出飽和度 接地是輸入被拉離其標稱1.5 V很遠的癥狀 并且是探測器當前星等和持續時間的函數。越高 脈沖電流,輸出飽和的時間越長,拉至地。這 第二個操作區域是恢復狀態。此恢復狀態時間 常量與 R 相關B和 C在.
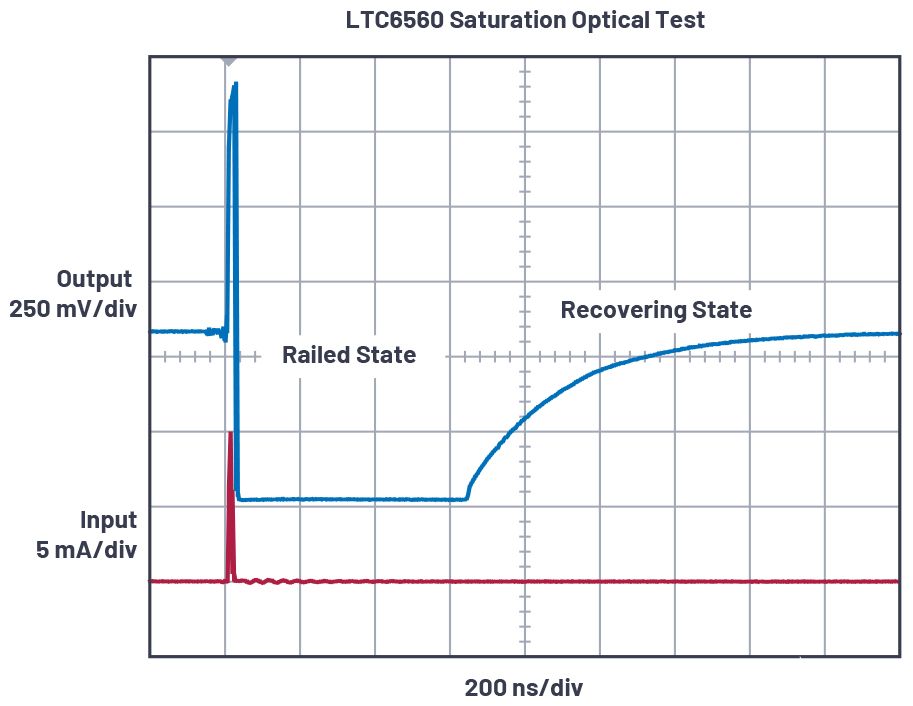
圖5.采用 C 語言的高輸入電流飽和度在= 100 pF, RB= 2.2 kΩ。
圖6a和圖6b顯示了不同條件下的兩種機制 它們提供了更多的視覺見解。總恢復時間是 交流耦合輸入TIA的供電軌和恢復時間。可能很誘人 對 R 使用較小的電阻值B以減少恢復時間,但請記住 RB也是檢波器的并行路徑,并竊取一些輸入電流—— 這種被盜電流轉化為APD總增益的降低。 不幸的是,由于激光雷達有望在現實世界中運行,因此有可能 看到來自其他系統的大光脈沖,并導致數十微秒 從納秒激光脈沖恢復飽和。
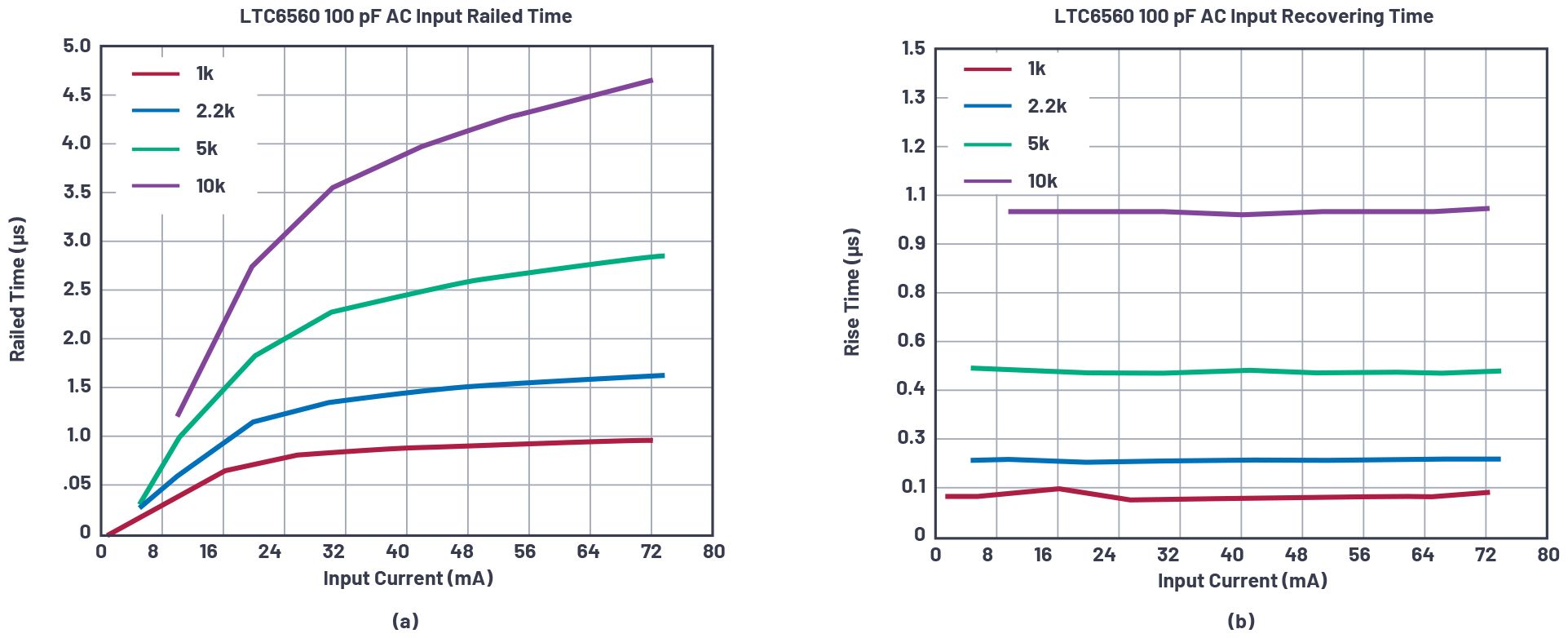
圖6.(a) 各種R的軌道時間恢復B值。(b) 恢復各種R的上升時間恢復B值。
輸入直流耦合注意事項
直流耦合輸入非常簡單。在高電平上,直流耦合輸入如圖所示 圖7允許TIA從飽和中快速恢復,并且僅受以下限制 TIA 的飽和恢復。這種方法的缺點是它將允許 直流從 APD 傳遞到 TIA 輸入。不幸的是,由檢波器引起的環境光、暗電流和泄漏可能會占用TIA的部分或大部分輸入 線性范圍。這種減小的動態范圍從根本上減少了接收鏈 信 噪 比。在充足的環境光下,TIA的動態范圍將嚴重降至零 動態范圍,使系統失明。
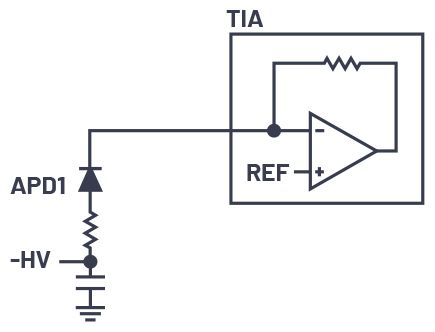
圖7.直流耦合 TIA 輸入。
減少環境光最常用的方法通常涉及光學 濾波,如圖8所示或使用有源電路去除 偏移如圖 9 所示。光學帶通濾光片可以直接涂覆在 APD 窗口或鏡頭上。在高層次上,光學帶通濾波器將減少 環境光的影響。濾光片對來自 內部光學器件,這可能會導致大的、不需要的信號。但是,它是一個 良好的第一道防線。有源直流消除電路向 TIA 輸入注入相反的電流,以抵消輸入直流分量。此方案 需要從 TIA 輸出到其輸入的閉環,并且需要非常小心 保持 TIA 的噪聲和開關性能。既然我們在尋找 當TIA增益為10k至100k時,環路穩定性也具有挑戰性。電路技術和 本文將不介紹此體系結構。這里最大的收獲是 一旦電路中的穩定性和輸入電容得到緩解,直流消除可提供最佳的飽和恢復性能。然而,這是在 增加成本和復雜性的代價。
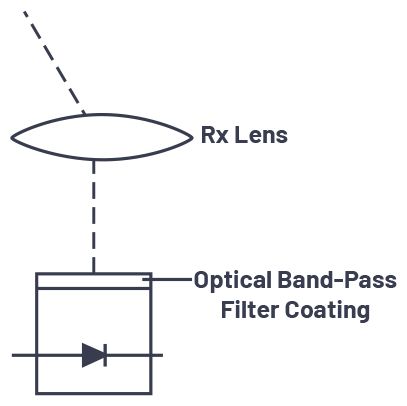
圖8.光學帶通濾光片,用于去除大多數環境光。
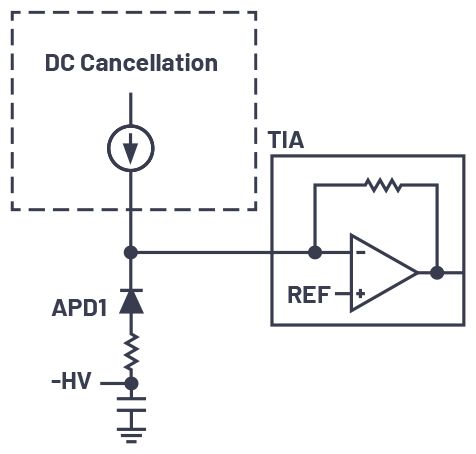
圖9.DC 取消方案。
相互排斥的設計選擇
在考慮交流與直流耦合或電流時,有許多權衡 取消激光雷達的 TIA 輸入。多路復用激光雷達的理想特性 接收模擬前端將是它具有高動態范圍,恢復 快速,抑制環境光,并以無限帶寬消耗很少的功率。現實情況是,其中一些品質具有相互排斥的設計 考慮。
| 輸入耦合 | 直流 | 交流 | 帶電流消除功能的直流電 |
| 優勢 | 快速飽和恢復 | 即使在環境光和ADP泄漏的情況下也能實現最大動態范圍 | 即使在環境光和ADP泄漏的情況下也能實現最大動態范圍 |
| 快速通道切換 | 快速飽和恢復 | ||
| 設計簡單 | 快速通道切換 | ||
| 弊 | 環境光和ADP泄漏引起的動態范圍損失 | 幾個設計注意事項 | 需要仔細考慮的復雜電路 |
| 飽和度恢復緩慢 |
交流耦合與直流耦合
如果選擇交流耦合,則動態范圍會增加,但代價是 飽和時的恢復時間。交流耦合適用于以下應用 可以容忍 TIA 10 微秒的恢復時間。如果直流耦合 被選中,恢復速度要快得多,但代價是部分或全部 動態范圍因直流效應而丟失。直流耦合在需要快速恢復且對直流效應不那么敏感的應用中是有意義的 抑制動態范圍。如果具有集成電流消除功能的直流耦合是 選擇拓撲結構,您的動態范圍增加,飽和恢復速度 通道切換速度更快,需要額外的設計復雜性。這種拓撲結構是汽車激光雷達的要求,因為需要 快速恢復和更大的動態范圍是額外的設計和成本的合理性。
只需在跨阻輸入端添加一個交流耦合電容 脈沖應用中的放大器會損害系統的性能。 但是,可以進行權衡以實現現實目標,具體取決于您的 需要。并非所有系統都需要最佳恢復時間(例如,工業 和儀表系統),交流耦合可以應用于這些電路。 在輸入為交流耦合時TIA難以恢復的情況下, 責怪 TIA 很方便。然而,即使使用理想的 TIA 型號 零恢復時間,當 增加了交流電容器。在這種情況下,可能有意義的情況是 考慮添加直流耦合或直流耦合直流消除電路。
總結
激光雷達輸入不是一個微不足道的話題,而且會有很多活動部件 設計過程。信號鏈將有所不同,具體取決于哪個 您選擇的設計,因此在選擇之前考慮所有選項很重要 最適合您的項目。
審核編輯:郭婷
-
放大器
+關注
關注
143文章
13554瀏覽量
213144 -
接收器
+關注
關注
14文章
2458瀏覽量
71806 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189625
發布評論請先 登錄
相關推薦
空間激光雷達最小接收光功率的計算
激光雷達分類以及應用
常見激光雷達種類
激光雷達面臨的機遇與挑戰
激光雷達-無人駕駛汽車的必爭之地
消費級激光雷達的起航
固態設計激光雷達
TOF激光雷達
激光雷達知多少:從技術上講講未來前景
由iphone12說說激光雷達 FMCW激光雷達 精選資料分享
激光雷達是什么,激光雷達的應用說明
如何有效地設計和優化激光雷達系統的TIA接口





 工商網監
工商網監
評論