") 智駕系統(tǒng)的研發(fā)給傳統(tǒng)新能源汽車帶來了哪些福音
智駕系統(tǒng)的研發(fā)給傳統(tǒng)新能源汽車帶來了哪些福音
隨著越來越多的新能源車也開始搭載智能駕駛系統(tǒng),對于智能駕駛系統(tǒng)所承載的更多功能,新能源車需要提出一些自己的需求,以確保在維持正常的智能駕駛功能。對于節(jié)能來說,純電動車比混動車更加執(zhí)著。比如常規(guī)的節(jié)能模式包含Eco模式,先進一點的節(jié)能模式為滑行能量回收和制動能量回收這兩種。但是在這兩個功能的激活期間對智駕系統(tǒng)會有一些功能互斥關(guān)系,也有一些單獨的需求需要梳理。
實際上滑行能量回收與制動能量回收是兩種不同的能量回收形式。比如當(dāng)某個或某幾個車輪打滑時,ESP一定要調(diào)動液壓去推活塞來進行制動,可利用剎車片進行制動則是車輛動能轉(zhuǎn)換為熱能的過程。滑行能量回收要求將車輛動能轉(zhuǎn)換為電能并實現(xiàn)存儲的過程,而制動能量回收則是在制動行程的頭段設(shè)置一部分空行程,當(dāng)我們踩制動踏板在空行程范圍內(nèi)時液壓并不會推動制動活塞,隨著制動踏板行程的延伸,活塞制動加入進來,此時就是電制動、活塞制動的疊加狀態(tài)。對駕駛者造成的感覺就是加速度大幅度增加,會形成非常突兀的感覺。
相比較之下滑行能量回收SRBS(依靠滑行倒拖阻尼獲得減速度)要比制動能量回收CRBS更容易去實現(xiàn),能量回收的上限也更高,甚至是可以達到1G減速度的能量回收。但如此大的減速度,制動能量回收目前則承受不住,CRBS目前能達到0.3-0.5G減速度能量回收。
滑行能量回收系統(tǒng)在設(shè)計、標(biāo)定方面更為簡單。制動能量回收系統(tǒng)與ESP、ABS等電子系統(tǒng)會存在很大的沖突。(當(dāng)然后續(xù)像iBooster這種真空助力器的設(shè)計改變了這一現(xiàn)狀)。
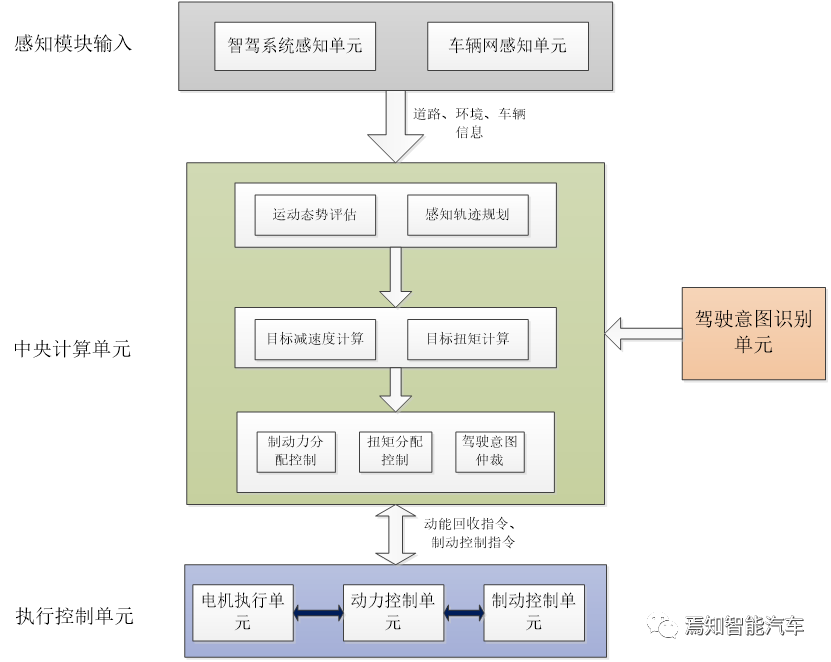
實際上我們最終的目的是面向服務(wù)的車輛控制,包括進行子服務(wù)拆解(如根據(jù)設(shè)置的導(dǎo)航目的地拆解子功能包括HWP、NOP、SafeStop、AEB等)、子服務(wù)最優(yōu)實現(xiàn)模式(智駕功能結(jié)合整車功能確認哪些相互之間會有影響,其目的是獲得更優(yōu)的回收能量控制)。那么對于搭載先進的智能駕駛系統(tǒng)的新能源車而言,又可以增進哪些更為優(yōu)質(zhì)的駕駛體驗服務(wù)呢?本文將對其進行針對性策略梳理。 滑行能量回收 對于新能源車而言,如果采用雙電機模式,最高可提供290kW的回收功率,大部分時候減速度可由電機完成。對于滑行能量回收而言,通常先進的新能源車會設(shè)計三種能量回收等級。包括:強、弱、自適應(yīng)。三種模式的切換主要通過方向盤后方的撥片來實現(xiàn),駕駛員可通過撥片位置選擇進入某一種回收模式從而產(chǎn)生不同的動能回收力度。其中強回收模式表示只要松開油門就會有很強的動能回收;弱回收模式表示松油門后進入滑行模式;自適應(yīng)回收模式表示自車會根據(jù)路況和車距自動進行減速,能夠?qū)崿F(xiàn)單踏板駕駛,毫不夸張的說,自動模式下最高能實現(xiàn)5m/s2的減速度,能夠完成單踏板駕駛。
單純的強/弱回收模式控制邏輯相對比較機械和單一,其動能回收的強度是在開發(fā)中提前標(biāo)定好的數(shù)值,這是一種傳統(tǒng)的動能回收實現(xiàn)方式。即啟動車輛通過確認與前車的距離和相對速度(或前車的加速度信息)后,自動調(diào)整回收力度。通常情況下,兩車距離越近,相對速度越大(這里指本車大于前車的速度差),則能量回收的力度越大,最終確保能夠?qū)④囕v控制到停止。
自適應(yīng)能量回收策略會根據(jù)工況的變化自動調(diào)節(jié)滑行階段的回饋力矩,提高能量回收效率及舒適性。
主要可以針對如下幾種不同變化參數(shù)進行能量回收:
1)基于整車質(zhì)量的能量回收
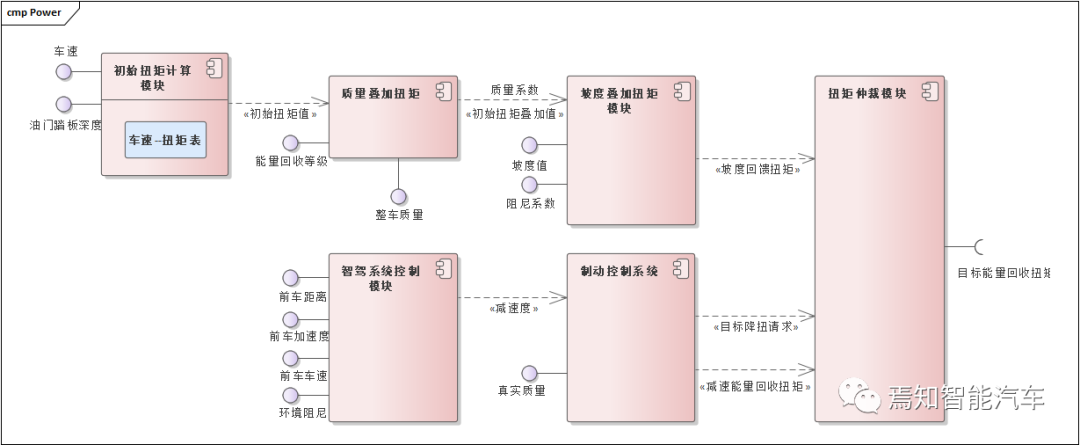
顧名思義,就是基于整車質(zhì)量,利用動力學(xué)方程里面的M參數(shù)對其控制扭矩進行調(diào)節(jié),保證在不同整車質(zhì)量的情況下,控制滑行回饋的減速度一致。這里需要注意,整車質(zhì)量除了自身負載外,還有一部分源自于環(huán)境對整車質(zhì)量可能造成的影響。比如各類附加乘客或貨物的載重。車輛自身的質(zhì)量發(fā)生較大變化時,自適應(yīng)能量回收功能根據(jù)當(dāng)前估算質(zhì)量與空載質(zhì)量的比值調(diào)整回饋扭矩。
整車質(zhì)量的初始值是可以提前植入VCU算法模塊的,如果車身質(zhì)量發(fā)生了變化,則需要結(jié)合CAN 線中的前軸總扭矩、車速、油門深度、制動深度、ESP估算的地面附著力等參數(shù)信號,由整車動力學(xué)平衡方程通過濾波算法處理得到質(zhì)量計算值。
2)基于道路路面的能量回收
路面情況影響的能量回收主要體現(xiàn)在路面是否有坡度和坑洼及附著力大小(是否打滑)等。比如,滑行能量回收中需要根據(jù)路面坡度,實時調(diào)節(jié)滑行回饋扭矩,使得整個控制過程更加符合駕駛員的預(yù)期感受。
當(dāng)坡度小于其限定的閾值時,具體說來,過程控制如下:
當(dāng)上坡工況下,坡度(該值通常可以由ESP內(nèi)置的IMU檢測發(fā)出,也可由TCU檢測發(fā)出)大于0同時小于一定閾值(該閾值可以提前標(biāo)定)時,VCU通過坡度值計算對應(yīng)的回饋扭矩衰減系數(shù),該衰減系數(shù)影響整個回饋扭矩的控制比重。在一定坡度范圍內(nèi),隨著坡度的增加該衰減系數(shù)可以減小回饋扭矩,降低由于坡度阻力產(chǎn)生的減速感。
當(dāng)下坡工況下,首先需要將自車質(zhì)量分解為沿著坡道的分量,VCU通過計算該分量得到疊加扭矩,該扭矩和回饋扭矩方向一致,可以增加回饋扭矩,從而產(chǎn)生一定的滑行減速度,避免車速增長過快。
3)基于自動跟車的能量回收
識別到本車前方有車,本車滑行能量回收功能激活,根據(jù)識別的本車與前車距離及相對速度自動調(diào)節(jié)回饋力矩,體現(xiàn)到整車上主要體現(xiàn)為可以自動調(diào)節(jié)車速,提高滑行能量回收效率及駕駛經(jīng)濟性。通過滑行能量回收產(chǎn)生的減速度對于駕駛員來說體驗感會更加友好。
整個自適應(yīng)滑行能量回收過程通過檢測本車車速、本車與前車距離、前車車速、前車減速度等信息。跟車滑行能量回收控制時,檢測到與前方車輛的距離小于一定閾值時且與前方車輛的相對速度逐漸增大時,VCU會根據(jù)與前車的相對速度及相對距離計算化性能量回收過程中需要實現(xiàn)的目標(biāo)減速度。結(jié)合目標(biāo)減速度與目標(biāo)回饋扭矩的關(guān)系,計算出對應(yīng)適當(dāng)?shù)幕仞伵ぞ刂底鰹槟芰炕厥盏哪繕?biāo)扭矩值。
首先,判斷自車是否進入跟車邏輯。當(dāng)VCU接收到智駕發(fā)送的本車道前方目標(biāo)為有效值時(即ADC_FollowObj==Valid)&& 坡度信號狀態(tài)為有效(Slope_Status==Valid)&& 自車車速>=標(biāo)定車速(比如怠速)。當(dāng)然,也可參照智駕領(lǐng)域的跟車邏輯判定方式判斷整車是否進入前方跟車狀態(tài)。
其次,需要根據(jù)如下公式計算在某一時刻的本車跟隨前車的目標(biāo)跟車距離。

其中△V表示兩車的相對速度,tfollow表示跟車時距,dmin表示跟車需要的最小距離。
然后,由于對于能量回收而言實際是通過控制車輛的反拖力矩變化來控制減速度和減速率。因此,下一步需要重點計算減速度和減速率。
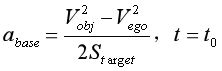
如上公式中abase表示在某一瞬時狀態(tài)下的基礎(chǔ)減速度值,Vobj表示跟車目標(biāo)速度值,Vego表示自車速度值。整個減速度規(guī)劃是持續(xù)性的劃分的積分時間可以足夠小的一定范圍內(nèi)。當(dāng)然整個調(diào)整過程需要通過PID進行反饋回環(huán)控制。

如三個公式,做如下說明,首先我們根據(jù)識別到的當(dāng)前目標(biāo)距離與實際距離在固定時刻點t0計算一個基礎(chǔ)加速度值abase。然后根據(jù)在一定時間t內(nèi)識別到的實際距離和目標(biāo)距離差值參照PID控制邏輯構(gòu)建對應(yīng)的控制結(jié)構(gòu),生成跟車的最終目標(biāo)加速度值aobj。
最后,也是對于滑行能量回收最重要的一步,就是根據(jù)計算生成的加速度值轉(zhuǎn)化為跟車滑行回饋扭矩,表示如下:

如上公式中,mego表示質(zhì)量計算值,aroll表示滾動阻力加速度,aslope表示坡道阻力加速度,F(xiàn)str表示轉(zhuǎn)向阻力補償,R表示滾輪半徑,該值是在進行方向盤轉(zhuǎn)向標(biāo)定的時候提前標(biāo)定好的。可以通過查表得到具體的對應(yīng)值。
從如上分析看來,整個滑行能量回收的整個控制過程可參照如上三種檢測和計算方式的控制值進行“自適應(yīng)”能量回收控制。
4)車聯(lián)網(wǎng)相關(guān)能量回收
另一種常用的能量回收的場景是基于道路設(shè)施、標(biāo)牌等相關(guān)單元的,這里舉幾個簡單的例子進行說明。比如通過紅綠燈前需要適當(dāng)減速以在燈前停止;又如即將通過某一限速牌前需要適當(dāng)減速;還有即將進入匝道前等等這一系列場景都需要提前減速。
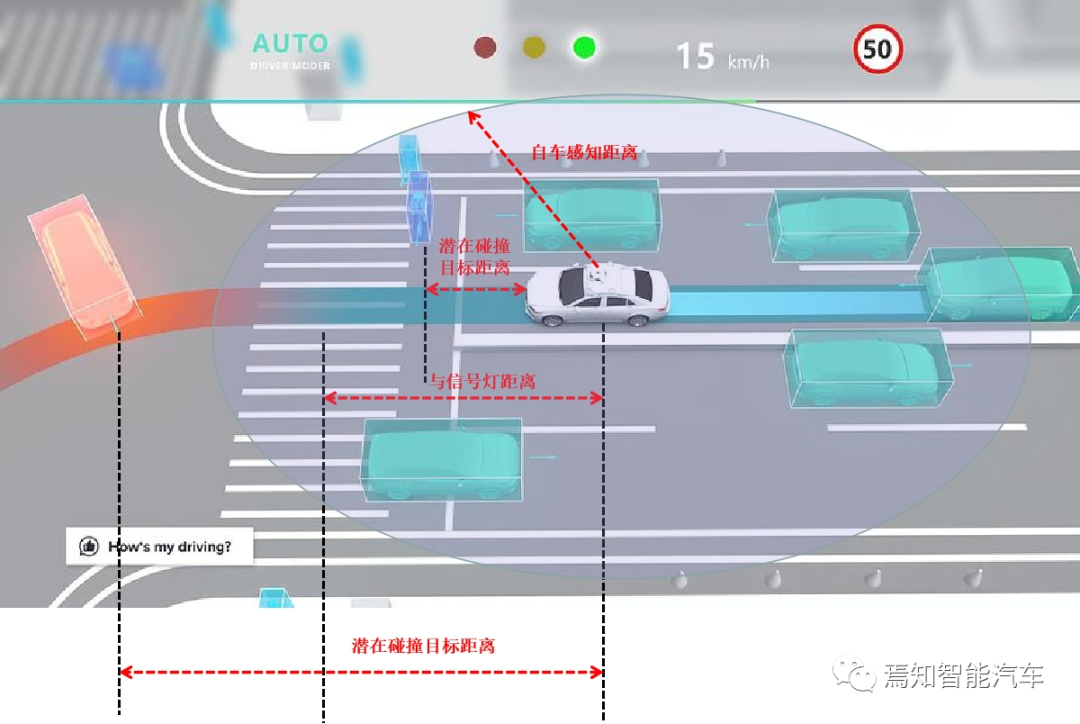
因此,如果可以通過高階智駕系統(tǒng)識別到前方道路的紅綠燈信息(包含紅綠燈狀態(tài)、紅綠燈倒計時信息、紅綠燈距離當(dāng)前車輛的距離);通過紅綠燈倒計時和紅綠燈距離信息,兩者結(jié)合參照如上類似跟車滑行減速的方式計算合適的滑行回收力矩,用于控制車輛。即將紅綠燈看成前方靜止車輛目標(biāo),其相應(yīng)的Vobj應(yīng)該等于0。
其次,識別到前方道路的限速牌信息(包含限速值信息、限速標(biāo)牌距離當(dāng)前道路的距離信息)。前方標(biāo)牌目標(biāo)信息可以看成是前車為靜止目標(biāo)的類似模式來進行回收扭矩計算。標(biāo)牌信息顯示的限速值可看成Vobj=對應(yīng)的限速值。
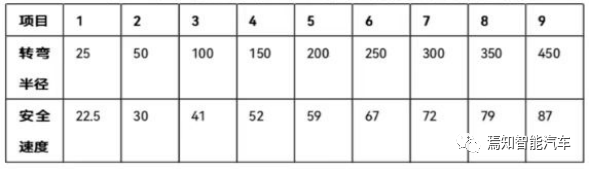
如果是考慮類似高速點對點駕駛的NOA場景,在車輛下匝道,即將過彎道這類場景時,其目標(biāo)車速Vobj具有一定的不確定性,可以綜合考慮參照經(jīng)驗值標(biāo)定。通常情況下匝道限速為30-40kph,彎道可提前根據(jù)彎道半徑進行過彎速度標(biāo)定。
各彎道半徑下對應(yīng)的最大駕駛速度表:
制動能量回收 這里需要說明的是除開滑行能量回收外,在新能源能量回收這塊還有一種制動能量回收機制。這種機制和滑行能量回收最大的區(qū)別就在于,前者是靠松油門后VCU反拖獲得制動減速度。制動能量回收則是通過駕駛員踩制動踏板來產(chǎn)生一定的制動減速度從而獲得制動力。該制動力的分配由IPB參照當(dāng)前車速、駕駛員踩制動踏板深度來進行估算一個請求加速度。通常是IPB首先會給VCU發(fā)送一定的降扭請求,VCU解析該請求通常是轉(zhuǎn)化為對應(yīng)的滑行回饋扭矩,此過程會長生一定的反拖減速度值。IPB對該減速度值影響的車速值進行實時監(jiān)控,如果速度值在某一限定的時間內(nèi)小于某個閾值,則認為需要切入制動器進行強力制動。
如上整個控制過程都是由IPB自發(fā)主動完成的。有個問題大家可能會問,如果應(yīng)用于智駕系統(tǒng)而言,該方式是否還可以完全適用。通常智駕系統(tǒng)在對滑行能量回收和制動能量回收進行控制時,有比較明顯的區(qū)別。體現(xiàn)如下:
1)對于安全性功能如AEB、FCTB、ELKA、MEB等功能,通常對于制動響應(yīng)時間比較關(guān)注,在制定需求時,通常會考慮激活如上主動安全功能時,將兩種能量回收控制模式都抑制掉;
2)對于輔助駕駛功能呢如NOA、HWA、、ALC、LCC、ACC等功能,通常對于車聲控制的舒適性、平順性等有特殊要求。在制定需求時,通常會考慮激活如上輔助駕駛功能時,并不會考慮將上述兩種能量回收抑制,執(zhí)行器可根據(jù)自己的響應(yīng)能力進行自適應(yīng)調(diào)節(jié),只要確保在規(guī)定的時間內(nèi)響應(yīng)到上層的減速請求即可。實際上對于這種通過能量回收方式響應(yīng)的減速度信息在執(zhí)行到穩(wěn)態(tài)前的狀態(tài)沖擊會更小、震蕩時間也會更短。 基于地形的動能模式自由切換 在一些常規(guī)駕駛車輛中,會有道路模式控制方案。比如針對草地/砂礫地/雪地、泥濘地面/車轍地、沙地等不同的路面情況,通過駕駛員手動選擇不同的駕駛模式可以使得整車在這些路面上得到更好的控制。該控制過程是通過VCU提前標(biāo)定不同的動力扭矩控制參數(shù),制定不同的能量回收策略,同時有部分情況還會考慮與ESP的相關(guān)功能進行聯(lián)合標(biāo)定。
那么問題來了,為了提升駕駛體驗感,動力專業(yè)希望能夠有一種針對路面情況提前自適應(yīng)調(diào)節(jié)動能模式切換。即,不在需要駕駛員提前識別前方道路情況按壓對應(yīng)的模式按鈕切換到對應(yīng)的場景調(diào)度中。比如檢測到前方為雪地,則提前一定距離自主切換為雪地模式。實際上ADAS系統(tǒng)做到更加智能的程度也是需要自主切換駕駛模式的。這點上與智能汽車的需求是比較契合的。
當(dāng)然,結(jié)合ADAS系統(tǒng)感知能力,該策略是基本可以實現(xiàn)的。對于路面的識別目前我們還是多數(shù)依靠視覺方案來實現(xiàn)。傳統(tǒng)的識別方式是場景庫提前適配,識別過程中通過圖像匹配來實現(xiàn),該方案需要提前跑較長時間的路試進行數(shù)據(jù)采集,采集的數(shù)據(jù)需要進行分類、標(biāo)注,最后形成典型的匹配場景庫。在實時檢測過程中,通過識別到的道路實際環(huán)境圖像與其場景庫中的圖像進行像素級或區(qū)塊級匹配,便可以生成匹配結(jié)果供參考。
對于如上主流圖像識別方法還主要停留在大量人工標(biāo)記圖片階段,即需要專門的圖片標(biāo)記人員從海量的圖片中對圖片進行選擇標(biāo)記,挑選出能夠用于訓(xùn)練圖像識別模型的圖片。用這些標(biāo)記出的圖片組成訓(xùn)練集,并用于模型訓(xùn)練,在上述描述的方法中,存在一些人工成本高、效率低下、標(biāo)記誤操作幾率大、模型迭代優(yōu)化復(fù)雜等不容忽視的缺陷。
先進一點的方法是通過自學(xué)習(xí)方式來,即邊識別邊聚類邊重建,通過一定的先驗信息作為導(dǎo)入,通過建立自學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)可以很輕松的從現(xiàn)實中提取的圖片中提取關(guān)鍵信息,識別出是否符合相應(yīng)的實驗結(jié)果。
對于第一種方案可能更多的是靠圖像match的方式進行。因此,更多的是考慮常規(guī)邏輯算力的損耗,對于地形環(huán)境識別這類較為復(fù)雜的場景顯得比較吃力。而對于第二種方式則是基于點云或者紋理信息的,這就需要更多的考慮AI算力損耗。并且整個點云聚類和重建過程也是極其龐大的計算量。因此,在考慮算力不高的域控場合,其適用度不大。 總結(jié) 除開如上幾種針對新能源車所優(yōu)化的性能項外,實際上還有很多可以利用智駕系統(tǒng)能牽起來優(yōu)化的傳統(tǒng)功能,比如奔馳最近較火的魔毯功能(也有叫主動懸架功能)也是充分利用了智駕系統(tǒng)的感知能力對車輛的提前控制。
目前自動駕駛在業(yè)界進展還是比較緩慢,導(dǎo)致很多投資者對于其信心有些受到打擊。但是筆者想說的是智駕系統(tǒng)本身的利用價值并不僅僅在于讓車輛自主駕駛的更加智能,更在為傳統(tǒng)車型提供更多的智慧眼,也就是讓整個車輛不再是盲車。這點上對于優(yōu)化整個車輛控制就顯得尤為重要了。
審核編輯 :李倩
-
新能源車
+關(guān)注
關(guān)注
3文章
606瀏覽量
23781 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2454瀏覽量
48654
原文標(biāo)題:智駕系統(tǒng)的研發(fā)給傳統(tǒng)新能源汽車帶來了哪些福音
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發(fā)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
精益思維在新能源汽車研發(fā)中的應(yīng)用體現(xiàn)
解決方案丨EasyGo新能源系統(tǒng)實時仿真應(yīng)用
新能源汽車如何避免火災(zāi)
新能源汽車智能充電樁的技術(shù)與應(yīng)用
新能源汽車檢測維修解決方案


解決方案丨PPEC車載DCDC轉(zhuǎn)換器:新能源汽車的高效能源動力系統(tǒng)
新能源汽車不安全?新能源汽車測試之方案篇——充電樁綜合測試

【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 新能源到底新在何處?新能源在國內(nèi)如何發(fā)展?
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 A 序
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】新能源汽車值得買嗎?未來又會如何發(fā)展
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】1.汽車產(chǎn)業(yè)大變局
新能源如何研發(fā)動力鋰電池系統(tǒng)

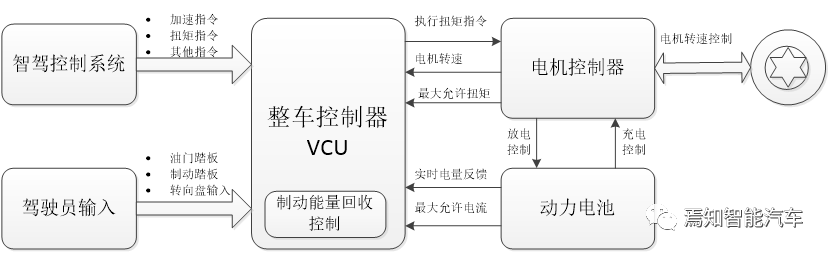
新能源汽車整車電控系統(tǒng)詳解






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論