") BEV還有什么新的玩法嗎
BEV還有什么新的玩法嗎
特斯拉 NOA 導(dǎo)航輔助駕駛
大家想象中的自動(dòng)駕駛,其實(shí)沒(méi)有那么多定語(yǔ),應(yīng)該是從任意地點(diǎn)到任意地點(diǎn)都能自動(dòng)駕駛。
但是自動(dòng)駕駛技術(shù)的開(kāi)發(fā)難度實(shí)在太大,各種限制因素也多,所以現(xiàn)在在乘用車自動(dòng)駕駛領(lǐng)域,業(yè)界劃分出了不同的 ODD(可運(yùn)行區(qū)域),包括泊車域、行車域,行車域里面又有城市域、高速域,像蔚來(lái)還要把換電場(chǎng)景自動(dòng)駕駛這個(gè)域加進(jìn)去。
一段從車輛啟動(dòng)到車輛停好的旅程,被切割成了細(xì)分的很多段,業(yè)內(nèi)企業(yè)們正分段攻破。
正是因?yàn)檫@些域的存在,衍生出了很多的自動(dòng)駕駛功能(現(xiàn)在只能稱為「輔助駕駛功能」),比如泊車域的自動(dòng)泊車、遙控泊車、記憶泊車;而在行車域,又有基礎(chǔ)輔助駕駛功能(ACC、LCC、ALC),還有更高級(jí)一些的導(dǎo)航輔助駕駛,可覆蓋高速域以及城市域,再往后那就是真正的點(diǎn)到點(diǎn)自動(dòng)駕駛。
不過(guò)目前由于自動(dòng)駕感知技術(shù)還未達(dá)到極致成熟,從高速到城市,感知難度指數(shù)級(jí)提升,同時(shí)有其他限制因素,當(dāng)下最主流的智駕功能——導(dǎo)航輔助駕駛系統(tǒng)開(kāi)城的速度依然很慢。
01
導(dǎo)航輔助加速內(nèi)卷
BEV感知技術(shù)成主流
從目前業(yè)內(nèi)自動(dòng)駕駛的產(chǎn)品形態(tài)看,導(dǎo)航輔助駕駛功能越來(lái)越火爆,這個(gè)由特斯拉帶火的層次稍高一些的輔助駕駛功能,正在被國(guó)內(nèi)的新老車企爭(zhēng)相推動(dòng)上車,國(guó)內(nèi)的供應(yīng)商們也都往這個(gè)方向上卷,因?yàn)檫@個(gè)方向既受到法規(guī)允許,也能吸引到真實(shí)消費(fèi)者使用并為其買單。
未來(lái) 1-2 年,國(guó)內(nèi)的導(dǎo)航輔助駕駛功能 NOA、NGP、NOP、NZP、ANP、NOH、NCA、NOM 等將迎來(lái)大爆發(fā)。當(dāng)然,速度有快有慢,有的還在打磨高速導(dǎo)航輔助駕駛,有的已經(jīng)把車開(kāi)進(jìn)了城市,開(kāi)啟了更難的挑戰(zhàn)。
就在本月,此前主打 Robotaxi 開(kāi)發(fā)和運(yùn)營(yíng)的小馬智行正式宣布開(kāi)辟乘用車智能駕駛業(yè)務(wù)產(chǎn)品線,并已成立獨(dú)立事業(yè)部。
從其公布的智能駕駛量產(chǎn)方案中,要打造高速和城市導(dǎo)航輔助駕駛的規(guī)劃非常明確。
小馬智行公布的量產(chǎn)自動(dòng)駕駛方案
這也足夠說(shuō)明導(dǎo)航輔助駕駛系統(tǒng)已經(jīng)成為車企和供應(yīng)商的兵家必爭(zhēng)之地。
在導(dǎo)航輔助駕駛功能火爆和上量的背后,是自動(dòng)駕駛核心技術(shù)在驅(qū)動(dòng)。
感知技術(shù)、決策/規(guī)劃/控制技術(shù)、高精地圖技術(shù)等等,都在深刻影響著導(dǎo)航輔助駕駛產(chǎn)品的能力和體驗(yàn)。其中,感知技術(shù)以及定位技術(shù)是導(dǎo)航輔助駕駛功能實(shí)現(xiàn)的前提,沒(méi)有這二者,后面的規(guī)劃控制也就無(wú)從談起。
感知能幫助系統(tǒng)「看」到道路上的參與者和道路要素,定位能告訴系統(tǒng)「我在哪里」,所以你可以看到現(xiàn)在各家的導(dǎo)航輔助駕駛一方面要在傳感器種類和數(shù)量上卷;另一方面也很依賴于高精地圖數(shù)據(jù)。
其中的高精地圖覆蓋范圍以及新鮮度很大程度上限定了導(dǎo)航輔助駕駛的運(yùn)行連續(xù)性以及可用范圍。
可以預(yù)見(jiàn)的是,無(wú)論是高速導(dǎo)航輔助駕駛還是城市導(dǎo)航輔助駕駛,未來(lái)很長(zhǎng)一段時(shí)間還是得依賴高精地圖這一重要「?jìng)鞲衅鳌埂R驗(yàn)閱螐捏w驗(yàn)上來(lái)看,有高精地圖的功能和沒(méi)高精地圖的功能確實(shí)有著非常大的差距。
但是依賴高精地圖也不意味著行業(yè)放棄了對(duì)車端感知能力和技術(shù)的更高追求。其實(shí)是要尋找一種平衡:在有高精地圖的地方增強(qiáng)車輛智駕系統(tǒng)體驗(yàn);在沒(méi)有高精地圖的區(qū)域,系統(tǒng)能通過(guò)車上感知模塊來(lái)指導(dǎo)車輛完成自動(dòng)駕駛,比如像北京五環(huán)內(nèi)這樣的區(qū)域。
所以,行業(yè)也在推動(dòng)自動(dòng)駕駛感知技術(shù)的突破。感知技術(shù)接下來(lái)的主流會(huì)是什么?很多車企和供應(yīng)商的答案是 —— BEV 感知。
02
BEV是什么?為什么被需要?
BEV 全稱是 Bird's Eye View,也就是鳥(niǎo)瞰圖,是一種用于描述感知到的現(xiàn)實(shí)世界的視角或坐標(biāo)系(3D 空間),就像是上帝視角。另外,BEV 也是計(jì)算機(jī)視覺(jué)領(lǐng)域內(nèi)的一種端到端的、由神經(jīng)網(wǎng)絡(luò)將圖像信息從圖像空間轉(zhuǎn)換到 BEV 空間的技術(shù)。
大家知道在自動(dòng)駕駛車上,有很多的傳感器,如攝像頭、毫米波雷達(dá)、激光雷達(dá),自動(dòng)駕駛系統(tǒng)里傳統(tǒng)的圖像空間感知方法是將汽車上的雷達(dá)、攝像頭等不同傳感器采集來(lái)的數(shù)據(jù)分別進(jìn)行分析運(yùn)算,然后再把各路分析結(jié)果融合到一個(gè)統(tǒng)一的空間坐標(biāo)系,用于規(guī)劃車輛的行駛軌跡。
但這個(gè)過(guò)程中每個(gè)獨(dú)立傳感器收集到的數(shù)據(jù)和人眼類似,受特定視角的局限,經(jīng)過(guò)各自的分析運(yùn)算后,在后處理融合階段會(huì)導(dǎo)致誤差疊加,很難精準(zhǔn)地拼湊出道路實(shí)際全貌,給車輛的決策規(guī)劃帶來(lái)困難。
BEV 感知就好比是一個(gè)從高處統(tǒng)觀全局的「上帝視角」,車身多個(gè)傳感器采集的數(shù)據(jù),會(huì)輸入到一個(gè)統(tǒng)一模型進(jìn)行整體推理,這樣生成的「鳥(niǎo)瞰圖」,有效地避免了誤差疊加;BEV 方案還支持「時(shí)序融合」,也就是不僅收集一個(gè)時(shí)刻的數(shù)據(jù),分析一個(gè)時(shí)刻的數(shù)據(jù),而是支持把過(guò)去一個(gè)時(shí)間片段中的數(shù)據(jù)都融合進(jìn)模型做環(huán)境感知建模,這樣可以讓系統(tǒng)感知到的結(jié)果更穩(wěn)定,使得車輛對(duì)于道路情況的判斷更加準(zhǔn)確,讓自動(dòng)駕駛更安全。
BEV 感知技術(shù)其實(shí)是特斯拉帶火的,作為業(yè)內(nèi)純視覺(jué)感知技術(shù)的鼻祖,很早就在這方面下功夫。
特斯拉車身上有多個(gè)攝像頭和毫米波雷達(dá),在做感知的時(shí)候,需要把不同傳感器的感知數(shù)據(jù)收集并有效融合起來(lái),輸出感知結(jié)果。
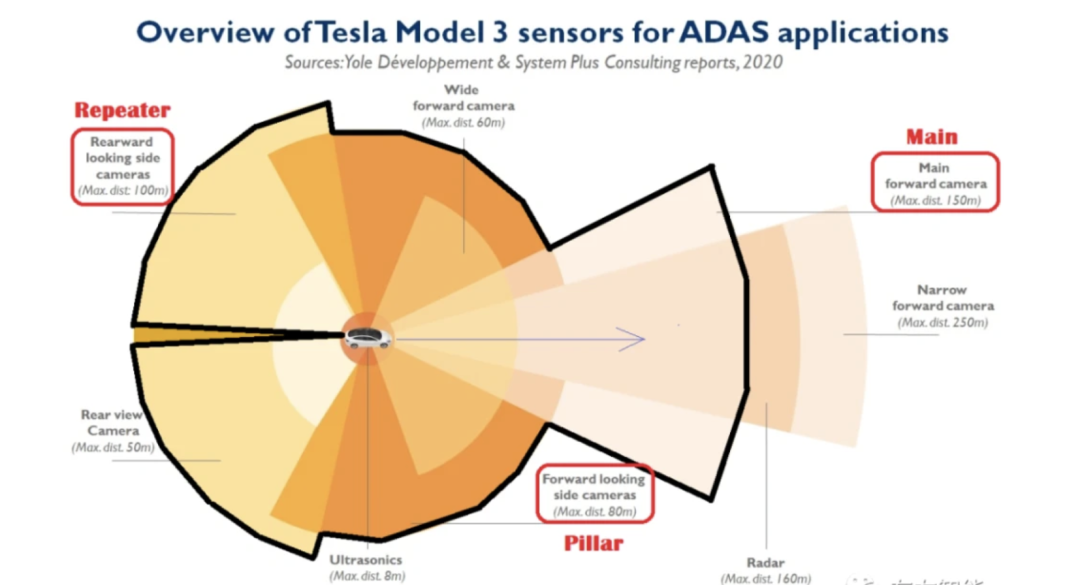
特斯拉車上不同位置的攝像頭的參數(shù)并不一樣(相機(jī)的內(nèi)外參不同),包括焦距長(zhǎng)度、視野寬度、深度感受野等等,這就導(dǎo)致同一個(gè)物體在不同的相機(jī)里是不一樣的。
特斯拉在引入 BEV 之前采用的方式是:在每個(gè)相機(jī)上單獨(dú)進(jìn)行感知,然后再將不同相機(jī)感知到的結(jié)果進(jìn)行融合。
但這種方式會(huì)存在幾個(gè)問(wèn)題:
比如融合困難,將不同相機(jī)的感知結(jié)果進(jìn)行融合需要大量的超參,寫(xiě)起來(lái)非常復(fù)雜,并且由于深度估計(jì)的誤差,最終的輸出結(jié)果可能會(huì)相互沖突,導(dǎo)致融合結(jié)果不一致。
另外就是圖像空間的輸出對(duì)于后續(xù)任務(wù)來(lái)說(shuō)很不友好,比如在一些預(yù)測(cè)任務(wù)上,如果不同相機(jī)單獨(dú)感知,則很難預(yù)測(cè)被大面積遮擋的物體;單個(gè)攝像機(jī)也無(wú)法看到大物體的全貌,會(huì)導(dǎo)致難以正確預(yù)測(cè)。
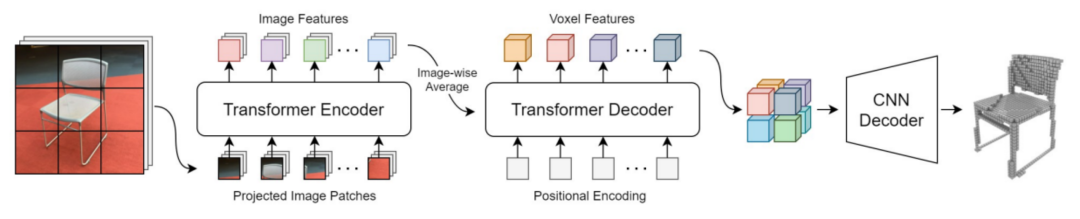
為了解決這些問(wèn)題,特斯拉采取的方法就是用神經(jīng)網(wǎng)絡(luò)將圖像空間映射到 BEV 空間。
其做法是把多個(gè)視角的圖像統(tǒng)一通過(guò)一個(gè)公共的特征提取器投影到一個(gè)統(tǒng)一的 BEV 空間里面。
在這個(gè)空間里面,通過(guò)深度學(xué)習(xí)去完成一個(gè)特征的融合,然后再通過(guò)一個(gè) 3D 的解碼器,直接端到端輸出最后的一個(gè) 3D 檢測(cè)和道路結(jié)構(gòu)信息。下游的像規(guī)劃與控制模塊直接可以在 BEV 的空間上去進(jìn)行。
特斯拉 BEV 坐標(biāo)轉(zhuǎn)換
從 2D 圖像空間到 3D BEV 空間如何轉(zhuǎn)換?
這里不得不提到 Transformer。
大概從 2017 年開(kāi)始,Transformer 作為一種新型的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)開(kāi)始引起研究人員的廣泛關(guān)注。
Transformer 與處理序列數(shù)據(jù)常用的循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)不同,Transformer 中的注意力機(jī)制并不會(huì)按照順序來(lái)處理數(shù)據(jù),也就是說(shuō),每個(gè)元素和序列中的所有元素都會(huì)產(chǎn)生聯(lián)系,這樣就保證了不管在時(shí)序上相距多遠(yuǎn),元素之間的相關(guān)性都可以被很好地保留。通俗點(diǎn)說(shuō)就是會(huì)「聯(lián)系上下文」,而且還會(huì)抓重點(diǎn)。
Transformer 首先被應(yīng)用在自然語(yǔ)言處理領(lǐng)域(NLP),用來(lái)處理序列文本數(shù)據(jù)。在自然語(yǔ)言處理領(lǐng)域取得廣泛應(yīng)用后,Transformer 也被成功移植到了很多視覺(jué)任務(wù)上,比如「圖像分類,物體檢測(cè)」等,并同樣取得了不錯(cuò)的效果。而且,Transformer 在海量數(shù)據(jù)上可以獲得更大的性能提升,這不正好就是自動(dòng)駕駛領(lǐng)域所需要的嗎?
正是因?yàn)榭吹搅诉@一點(diǎn),面向量產(chǎn)的自動(dòng)駕駛公司在擁有數(shù)據(jù)收集優(yōu)勢(shì)的情況下,自然就會(huì)傾向于選擇 Transformer 作為其感知算法的主體。
2021 年夏天,特斯拉的自動(dòng)駕駛技術(shù)負(fù)責(zé)人 Andrej Karpathy 在 AI Day 上,公開(kāi)了 FSD 自動(dòng)駕駛系統(tǒng)中采用的算法,而 Transformer 則是其中最核心的模塊之一。
BEV 感知技術(shù)要廣泛應(yīng)用,離不開(kāi) Transformer 這樣的模塊進(jìn)行空間坐標(biāo)系的轉(zhuǎn)換,比如將 2D 圖像轉(zhuǎn)換到 3D 空間里去。
其架構(gòu)簡(jiǎn)單說(shuō)就是:先通過(guò)一個(gè)共享的主干網(wǎng)絡(luò)來(lái)提取每個(gè)相機(jī)的特征,然后再通過(guò) Transformer 等將多攝像頭數(shù)據(jù),完成從圖像空間到 BEV 空間(3D)的轉(zhuǎn)換。
在 BEV 空間內(nèi),由于坐標(biāo)系相同,可以很方便地將圖像數(shù)據(jù)和激光雷達(dá)、毫米波雷達(dá)數(shù)據(jù)進(jìn)行融合,還可以進(jìn)行時(shí)序融合形成 4D 空間,這也是當(dāng)下 BEV 技術(shù)的大趨勢(shì)。當(dāng)然,特斯拉目前不需要融合激光雷達(dá)數(shù)據(jù)。
BEV 感知技術(shù)很好地解決了傳感器融合的很多阻礙性難題,而且也給了后續(xù)異構(gòu)傳感器大量上車之后的融合提供了借鑒。
國(guó)內(nèi)的自動(dòng)駕駛團(tuán)隊(duì)百度 Apollo 也經(jīng)歷了這個(gè)過(guò)程,他們?cè)?2019 年推出了 Apollo Lite 方案,其實(shí)也是一個(gè)多攝像頭融合的方案,包括單目前視+多個(gè)環(huán)視。
他們當(dāng)時(shí)也是采用后融合方式來(lái)做。
在這個(gè)感知方案的整體框架方面,每一個(gè)不同朝向的相機(jī),會(huì)先經(jīng)過(guò)一個(gè)神經(jīng)網(wǎng)絡(luò)去推理出相機(jī)下面的障礙物位置、大小、朝向等信息;單相機(jī)里面的目標(biāo)跟蹤,以及多相機(jī)融合等都是一些基于規(guī)則的方案去做的。
百度團(tuán)隊(duì)在單相機(jī)里面把深度學(xué)習(xí)做到一個(gè)比較高的程度了,整個(gè)單相機(jī)里面的 3D 感知信息都可以通過(guò)模型來(lái)輸出,然后基于 3D 標(biāo)注結(jié)果,直接端到端產(chǎn)出單相機(jī)的結(jié)果。
在過(guò)去的幾年里,單相機(jī)的 3D 感知能力也有一個(gè)比較大的提升,但是最后也遇到了一些瓶頸,比如有一些截?cái)嗟奈矬w,在一個(gè)相機(jī)里面是看不全的,就沒(méi)辦法很好地去對(duì)它做感知。
另外,一些跟蹤和平滑策略在圖像視角下,和最后規(guī)劃控制模塊所要的輸出空間其實(shí)是不一致的,這樣會(huì)總體上限制自動(dòng)駕駛的能力。
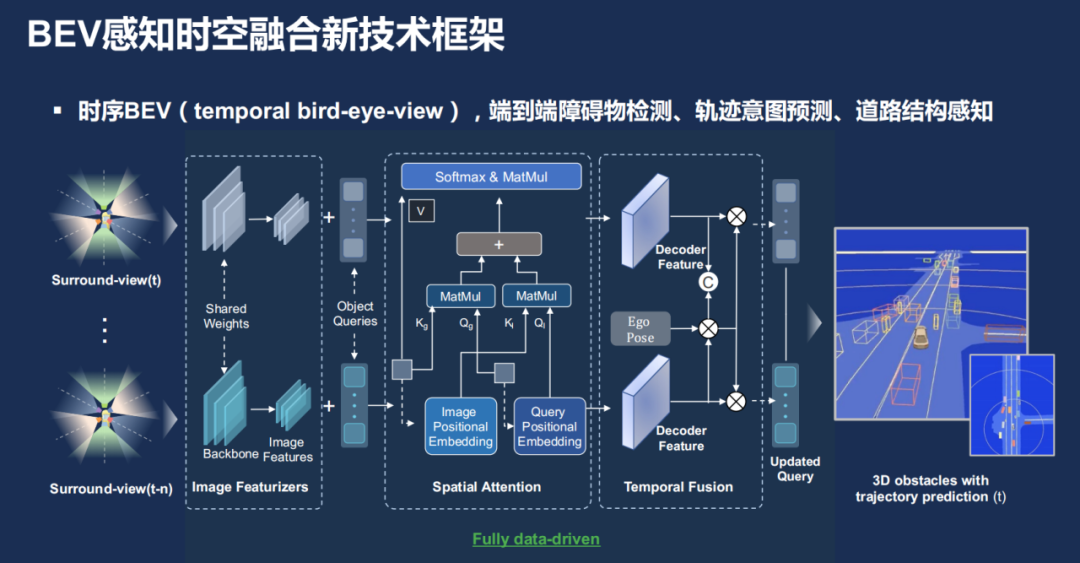
所以在過(guò)去一年里,百度 Apollo 的團(tuán)隊(duì)也將 BEV 感知應(yīng)用了進(jìn)來(lái),整體上使用一種持續(xù)并列的框架去端到端地做障礙物檢測(cè)、軌跡預(yù)測(cè)以及道路結(jié)構(gòu)感知,整體上會(huì)有一個(gè)時(shí)間序列,多幅圖像輸入進(jìn)來(lái)。然后通過(guò)圖像的特征提取器之后,得到圖像視角的特征,然后再通過(guò) Transformer 把那個(gè)特征投影到一個(gè)統(tǒng)一的 BEV 空間,再經(jīng)過(guò)解碼,最終得到一個(gè)端到端的一個(gè) 3D 感知效果。
特別是在道路結(jié)構(gòu)這一部分,百度因?yàn)橛凶约旱母呔貓D數(shù)據(jù),把這些數(shù)據(jù)和車輛的高精定位信息結(jié)合起來(lái),是可以直接轉(zhuǎn)換成 BEV 道路結(jié)構(gòu)的訓(xùn)練數(shù)據(jù),用于算法的訓(xùn)練。
也正是在 BEV 感知技術(shù)的加持下,百度的導(dǎo)航輔助駕駛 ANP 3.0 系統(tǒng)正在加速落地,這套系統(tǒng)能覆蓋高速場(chǎng)景、城市場(chǎng)景,甚至能自動(dòng)通過(guò)收費(fèi)站。作為已經(jīng)確定應(yīng)用這套能力的集度 ROBO-01 車型,最近也已經(jīng)去到交通流復(fù)雜的廣州進(jìn)行測(cè)試,去征服更多的感知難題。
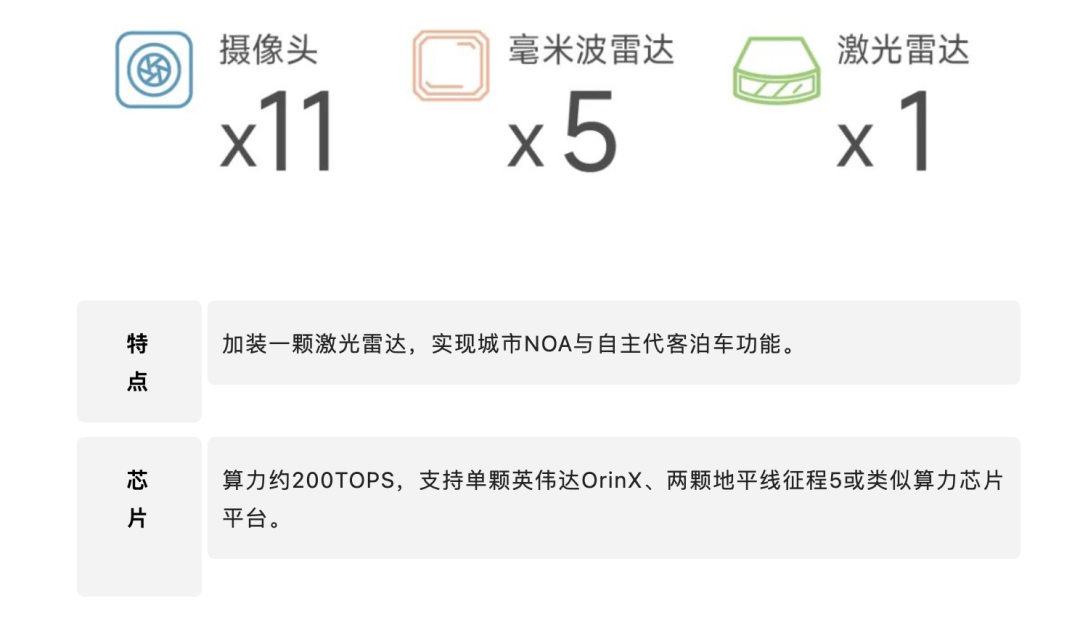
除了像特斯拉和 Apollo Lite 這種純視覺(jué)自動(dòng)駕駛方案,國(guó)內(nèi)現(xiàn)在掀起的是多傳感器融合方案,激光雷達(dá)(單顆或多顆)、攝像頭(像素越來(lái)越高)、毫米波雷達(dá)、超聲波傳感器等等。
這么多的異構(gòu)傳感器放在一起,感知數(shù)據(jù)如何融合?視覺(jué)數(shù)據(jù)和激光雷達(dá)點(diǎn)云數(shù)據(jù)如何融合?它們一個(gè)是 2D 圖像空間,一個(gè)是 3D 空間,如何比較穩(wěn)定的融合,而且效果還要好?
答案依然是 BEV 感知。
如前文所述,可以先通過(guò) Transformer 把視覺(jué)的 2D 圖像轉(zhuǎn)換到 3D 坐標(biāo)下,和其他的傳感器數(shù)據(jù)如激光雷達(dá)點(diǎn)云在空間坐標(biāo)上保持一致,在相同坐標(biāo)下融合起來(lái)就更加游刃有余。
如果從國(guó)內(nèi)的這些車企和供應(yīng)商的選擇來(lái)看,BEV 感知已經(jīng)是主流了。
而 BEV 感知技術(shù)成為應(yīng)用主流,也意味著其將推動(dòng)導(dǎo)航輔助駕駛這類功能更快量產(chǎn)、更好地落地。
一方面,那些應(yīng)用 BEV 感知技術(shù)的造車新勢(shì)力們,能更加好的提升系統(tǒng)的感知能力,讓功能的體驗(yàn)更好。
另一方面,那些應(yīng)用 BEV 感知技術(shù)的智駕供應(yīng)商,能夠更快去適配不同車企、不同車型的五花八門的需求,比如他們對(duì)車上智駕傳感器的不同配置的需求,可以靈活應(yīng)變,在感知效果上也不會(huì)因?yàn)閭鞲衅髋渲米兓兊貌环€(wěn)定、不可控。
03
哪些公司在用BEV?
雖然 BEV 感知技術(shù)不能解決自動(dòng)駕駛感知領(lǐng)域的一切疑難雜癥,但它提供了一個(gè)相比圖像更加貼近物理世界的空間,可以給后續(xù)的融合、規(guī)劃提供更多的可能性。
現(xiàn)在很多自研智駕系統(tǒng)的車企以及智駕供應(yīng)商都在使用 BEV 技術(shù)。
比如車企里面的蔚來(lái)、理想、小鵬;供應(yīng)商里面的百度 Apollo、毫末智行、紐勱科技、地平線;Robotaxi 公司轉(zhuǎn)型做智駕系統(tǒng)供應(yīng)商的輕舟智航、小馬智行等等。
每一家在具體使用這項(xiàng)技術(shù)的時(shí)候肯定會(huì)有不同,但是大致的技術(shù)框架應(yīng)該如下:
先將攝像頭數(shù)據(jù)輸入到共享的骨干網(wǎng)絡(luò)(Backbone),提取每個(gè)攝像頭的數(shù)據(jù)特征(Feature);
把所有的攝像頭數(shù)據(jù)進(jìn)行融合,并轉(zhuǎn)換到 BEV 空間;
在 BEV 空間內(nèi),進(jìn)行異構(gòu)傳感器數(shù)據(jù)融合,將視覺(jué)數(shù)據(jù)和激光雷達(dá)點(diǎn)云進(jìn)行融合;
進(jìn)行時(shí)序融合,形成 4D 時(shí)空維度的感知信息(3D+速度);
進(jìn)行多任務(wù)輸出,可以是靜態(tài)語(yǔ)義地圖、動(dòng)態(tài)檢測(cè)和運(yùn)動(dòng)預(yù)測(cè)等,給到下游規(guī)控模塊使用。
就拿剛剛公布要進(jìn)行智駕系統(tǒng)量產(chǎn)上車的小馬智行來(lái)講,其已明確自研了 BEV 感知算法。
可通過(guò)大模型識(shí)別各類型障礙物、車道線及可通行區(qū)域等信息,最大限度降低算力需求,同時(shí)在無(wú)高精地圖的情況下,僅用導(dǎo)航地圖也可實(shí)現(xiàn)高速與城市導(dǎo)航輔助駕駛功能。
特別是在高速場(chǎng)景中,小馬智行壓榨傳感器的性能,用魚(yú)眼相機(jī)參與行車 BEV 感知模型,減少對(duì)傳感器數(shù)量的依賴—— 使用 6 個(gè)攝像頭(4 個(gè)魚(yú)眼相機(jī)及前后向各 1 個(gè)長(zhǎng)距相機(jī))與 1 個(gè)前向毫米波雷達(dá)就可以實(shí)現(xiàn)高速導(dǎo)航輔助駕駛這樣的功能。
成功推出高速及城市 NOH 系統(tǒng)的毫末智行在感知領(lǐng)域同樣采用了 BEV 融合感知技術(shù),毫末的融合感知其實(shí)包含三個(gè)不同的維度:空間、時(shí)間和傳感器。
空間融合主要是將來(lái)自多個(gè)相機(jī)的圖像轉(zhuǎn)換到統(tǒng)一的 BEV 坐標(biāo),再進(jìn)行特征層融合;另外,單幀的信息會(huì)有很大的隨機(jī)性,因此,時(shí)序信息對(duì)于自動(dòng)駕駛環(huán)境感知來(lái)說(shuō)是非常重要的,毫末的時(shí)序融合也是采用了車輛自身的運(yùn)動(dòng)信息來(lái)統(tǒng)一多幀數(shù)據(jù)的空間坐標(biāo)系,從而在一個(gè)統(tǒng)一的空間坐標(biāo)系下融合來(lái)自不同時(shí)間的數(shù)據(jù)。
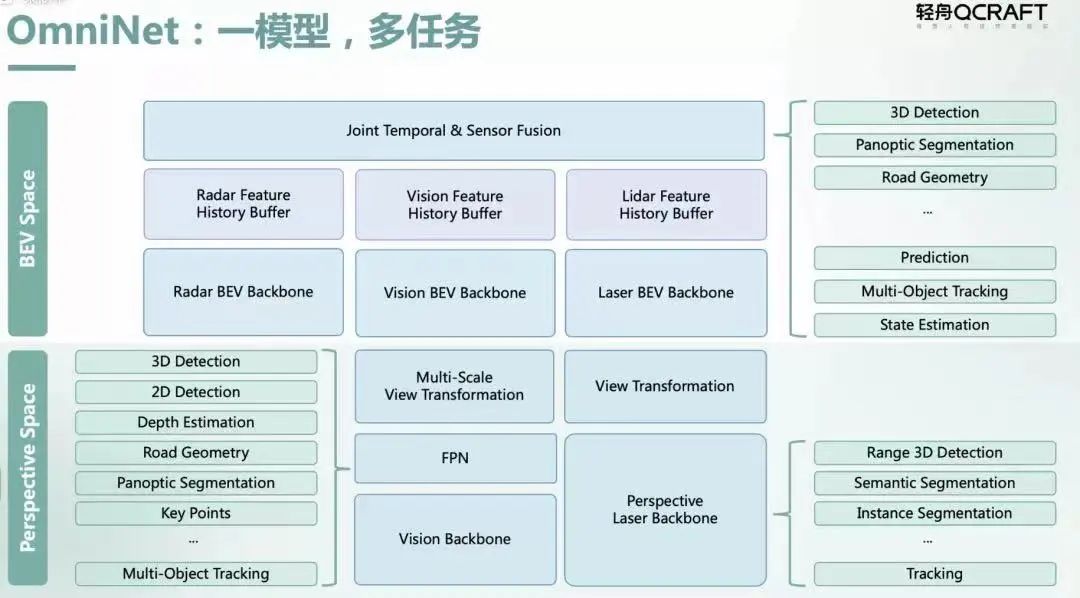
輕舟智航去年發(fā)布的 OmniNet 感知融合大模型就是將視覺(jué)、毫米波雷達(dá)、激光雷達(dá)等數(shù)據(jù)通過(guò)前融合和 BEV 空間特征融合,讓本來(lái)獨(dú)立的各個(gè)計(jì)算任務(wù)通過(guò)共享主干網(wǎng)絡(luò)(Backbone)和記憶網(wǎng)絡(luò)(Memory Network)進(jìn)行高效多任務(wù)統(tǒng)一計(jì)算,最終同時(shí)在圖像空間和 BEV 空間中輸出不同感知任務(wù)的結(jié)果,為下游的預(yù)測(cè)和規(guī)劃控制模塊提供更豐富的輸出。
雖然地平線是一家芯片企業(yè),但是其打造的 SuperDrive 全場(chǎng)景智能駕駛方案里,其實(shí)也應(yīng)用了感知融合 BEV 技術(shù),這套方案可支持高速、城區(qū)、泊車場(chǎng)景自動(dòng)駕駛,目前正給吉利方面供貨。
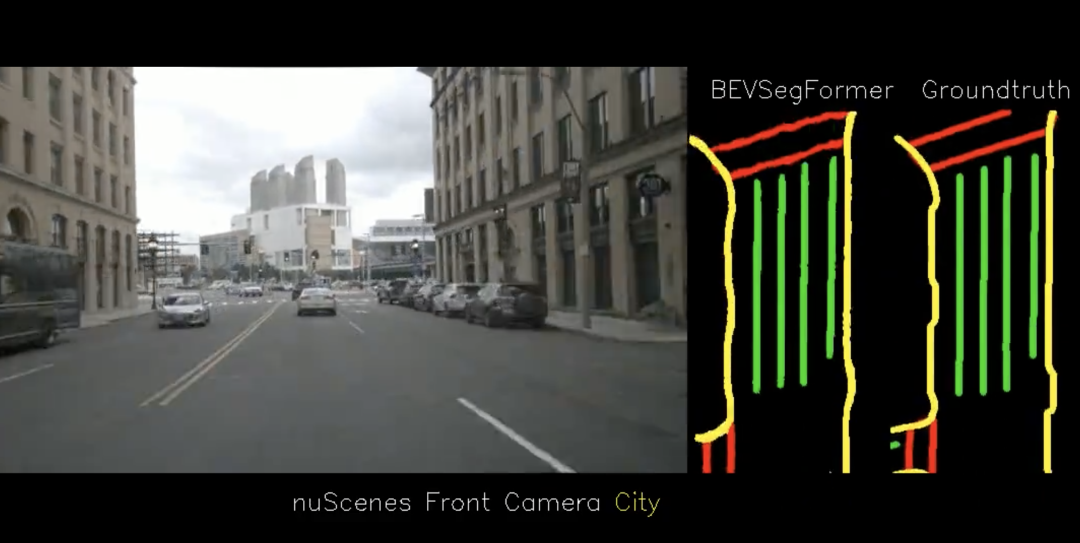
智駕供應(yīng)商紐勱科技的感知團(tuán)隊(duì)也基于 BEV 提出了 BEVSegFormer,一種基于 Transformer 的 BEV 語(yǔ)義分割方法,可面向任意配置的相機(jī)進(jìn)行 BEV 語(yǔ)義分割。
具體來(lái)說(shuō),BEVSegFormer 首先使用了共享的主干網(wǎng)絡(luò),對(duì)來(lái)自任意相機(jī)的圖像特征進(jìn)行編碼,然后通過(guò)基于可變形 Transformer 的編碼器對(duì)這些特征進(jìn)行增強(qiáng)。BEVSegFormer 還引入了一個(gè) BEV Transformer 解碼器模塊,對(duì) BEV 語(yǔ)義分割的結(jié)果進(jìn)行解析,以及一種高效的多相機(jī)可變形注意單元,完成 BEV 到圖像的視圖變換。最后,根據(jù) BEV 中的網(wǎng)格布局對(duì)查詢進(jìn)行重塑,并進(jìn)行上采樣,以有監(jiān)督的方式生成語(yǔ)義分割結(jié)果。
在車企方面,理想汽車的 L9 車型所搭載的 AD Max 系統(tǒng)也應(yīng)用了融合感知 BEV 技術(shù),它利用所謂「純視覺(jué)」進(jìn)行運(yùn)動(dòng)感知預(yù)測(cè),同時(shí)多傳感融合和高精地圖的信息輸入作為輔助。
另外,蔚來(lái)自動(dòng)駕駛 NAD 系統(tǒng),在 2023 年的上半年,也會(huì)進(jìn)行底層感知架構(gòu)的切換,轉(zhuǎn)向 BEV 模型,向特斯拉看齊。
當(dāng)然,以上并未完全列出所有采用 BEV 技術(shù)的行業(yè)玩家。
BEV 技術(shù)成為了廠商們選擇的主流感知融合技術(shù),該如何去定位這一技術(shù)?MAXIEYE CEO 周圣硯是這么看的:BEV 是深度學(xué)習(xí)之后的又一個(gè)新臺(tái)階,解決了過(guò)去多傳感器的變化和異構(gòu)帶來(lái)的各種各樣的融合感知算法的開(kāi)發(fā)問(wèn)題。
04
BEV還有什么新的玩法嗎?
當(dāng) BEV 感知技術(shù)成為主流,而且被多數(shù)廠商采用的時(shí)候,有些企業(yè)就開(kāi)始對(duì)其進(jìn)行改造了。
在今年 Create AI 開(kāi)發(fā)者大會(huì)上,百度就在 BEV 感知基礎(chǔ)上,提出了一個(gè)叫做「車路一體 BEV」的感知方案,取名叫 UniBEV,有點(diǎn)像「聯(lián)合 BEV」。
簡(jiǎn)單點(diǎn)理解就是,UniBEV 不但會(huì)將車端的感知數(shù)據(jù)拿過(guò)來(lái)做融合,也會(huì)將路端的感知數(shù)據(jù)也放進(jìn)來(lái),放到同一個(gè)坐標(biāo)系下。BEV 本來(lái)就是個(gè)上帝視角了,這里再加上路端的超視距感知數(shù)據(jù),那簡(jiǎn)直是開(kāi)掛一般的存在。但什么時(shí)候能在車端量產(chǎn)應(yīng)用現(xiàn)在還不太清楚。
具體來(lái)看看 UniBEV 的框架。
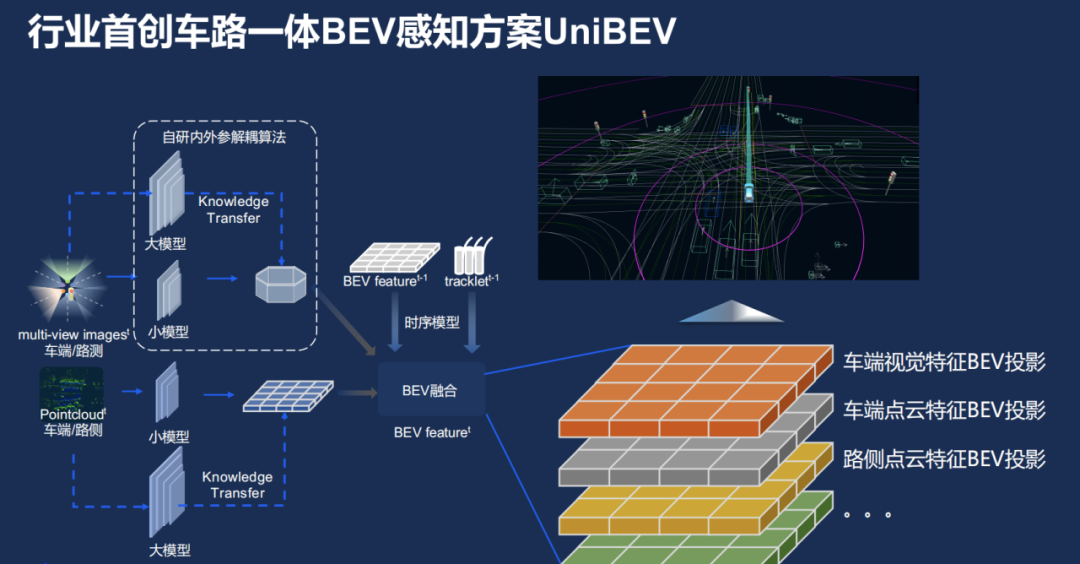
框架中的虛線框里有一個(gè)自研的內(nèi)外參解耦算法,這里的內(nèi)外參指的是傳感器的內(nèi)外參數(shù),比如相機(jī)內(nèi)參數(shù),指的是與相機(jī)自身特性相關(guān)的參數(shù),比如焦距、像素大小等;而相機(jī)外參數(shù)則是相機(jī)在真實(shí)世界坐標(biāo)系中的參數(shù),比如相機(jī)的安裝位置、旋轉(zhuǎn)方向等。
那為何要把內(nèi)外參解耦呢?百度說(shuō)他們作為智駕方案商,需要把方案供應(yīng)給不同的車廠,不同車廠車型會(huì)有不一樣的傳感器配置,比如供給集度的和供給比亞迪的傳感器方案就會(huì)不一樣。
有了這個(gè)解耦算法,可以把不同相機(jī)解耦開(kāi),讓每個(gè)相機(jī)獨(dú)立,這樣不管傳感器的相對(duì)位置如何變,研發(fā)團(tuán)隊(duì)都可以將其投影到一個(gè)統(tǒng)一的 BEV 空間下。
框架中另一部分是車端和路側(cè)的點(diǎn)云,而且路側(cè)也會(huì)裝一些攝像頭,這些數(shù)據(jù)的特征到最后都會(huì)投影到一個(gè)統(tǒng)一的 BEV 空間下,便能把可能的信息都融合起來(lái)。
最終,在 UniBEV 加持下,百度的智駕系統(tǒng)在車端、路側(cè)的動(dòng)靜態(tài)感知任務(wù)上都有不錯(cuò)的表現(xiàn)。
當(dāng)然,也不是誰(shuí)家都能搞這樣的車路一體 BEV 感知的,因?yàn)檫@也需要有大量的路段感知設(shè)備傳回的數(shù)據(jù),這是需要路側(cè)基建的。目前國(guó)內(nèi),百度是為數(shù)不多有車路協(xié)同路端基建業(yè)務(wù)的智駕供應(yīng)商,這一點(diǎn)也強(qiáng)化了 UniBEV 的獨(dú)特性。
當(dāng)然,我們也期待其他廠商,基于 BEV 感知技術(shù)再研究出更加突破性的技術(shù),助力自動(dòng)駕駛技術(shù)在感知領(lǐng)域的大躍進(jìn)。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752138 -
特斯拉
+關(guān)注
關(guān)注
66文章
6295瀏覽量
126476 -
輔助駕駛系統(tǒng)
+關(guān)注
關(guān)注
5文章
85瀏覽量
16954
原文標(biāo)題:BEV還有什么新的玩法嗎?
文章出處:【微信號(hào):nev360,微信公眾號(hào):焉知新能源汽車】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
自動(dòng)駕駛中一直說(shuō)的BEV+Transformer到底是個(gè)啥?

解鎖新玩法 | 迅為龍芯3A5000升級(jí)UEFI,全面支持銀河麒麟系統(tǒng)

正力新能為零跑T03歐盟版供應(yīng)BEV標(biāo)準(zhǔn)化電芯產(chǎn)品
電裝總部啟動(dòng)基于BEV的能源管理系統(tǒng)實(shí)證實(shí)驗(yàn)
豐田與比亞迪合作僅限BEV領(lǐng)域,廣汽豐田無(wú)DMI插混項(xiàng)目?
黑芝麻智能開(kāi)發(fā)多重亮點(diǎn)的BEV算法技術(shù) 助力車企高階自動(dòng)駕駛落地
BEV感知算法:下一代自動(dòng)駕駛的核心技術(shù)

一種基于PV變換和CNN模型生成BEV數(shù)據(jù)的方法

BEV和Occupancy自動(dòng)駕駛的作用

輕量級(jí)占用網(wǎng)絡(luò)FlashOcc:主打?qū)崟r(shí)性,高精度高效內(nèi)存

頂刊TPAMI最全綜述!深入自動(dòng)駕駛BEV感知的魔力!

自動(dòng)駕駛領(lǐng)域中,什么是BEV?什么是Occupancy?

基于LSS范式的BEV感知算法優(yōu)化部署詳解






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論