 用于水下監視的海洋機器人
用于水下監視的海洋機器人
在過去的十年里,由于民用目標受到的威脅日益增加,人們對港口和海洋基礎設施的安全產生了極大的興趣。歐洲不僅海域遼闊,而且海洋監視面臨的挑戰也十分復雜,需要對海洋安全采取全球性的辦法,為此歐洲和北約設立了包含不同國家的項目,以填補這方面的技術空白。傳統的水下監視采用人工解決方案,現在需要對港口和沿海水域進行監視和保護,這些能力由港口和海上監視與保護(HARMPRO)項目提供,HARMPRO項目在永久結構化合作(PESCO)框架內實施。在同一項目框架中,海上無人反潛系統(MUSAS)項目旨在開發一種基于人工智能的創新型反潛戰系統,該系統將加強水下基礎設施的安全性,為部隊提供充分的手段對入侵者做出快速反應。反恐防御研究計劃(DAT)為加強應對恐怖事件的組織和協調提供了措施,該計劃旨在降低各種情況下工作人員和設施易受到的攻擊。港口作業對世界經濟至關重要,必須確保安全可靠。為此,全球的組織機構一直在探索提高海上安全的各種技術。
在這個框架中,機器人扮演了一個關鍵角色,而無人載具(UxV)無疑是該領域中改變游戲規則的一項技術。監視系統中無人載具的使用有助于取代人類從事低級活動,為操作員提供高價值的信息以進行更高等級的決策。通過與其它觀測系統和載人系統的合作,無人載具正在發展成為可靠、長續航力、持久和具有成本效益的監視解決方案。在科學和操作層面上對這些技術的使用有爭議,突顯了當前潛在的可能性,也映射了對其未來的實際展望。這種分析是不斷變化的,一方面,技術的發展增強了它們在當今系統中已經實現的作用,使人們去假設更復雜的活動;另一方面,科學的進步提供了創新潛能,為新的理論場景開辟了道路。不論是在軍事還是民用操作環境中執行探測、識別和監視等任務,機器人系統的使用已經開始改變那些傳統的方法。美國海軍無人水下航行器主計劃有助于繪制無人水下航行器的使用場景,評估能力并分析優勢,從而為各種采辦和技術研究制訂精準的計劃。美國海軍無人水下航行器主計劃將UUV視為作戰場景中潛在的力量倍增器和降低人類操作員風險的工具。UUV的能力使得終端用戶可以根據具體應用來處理不同的任務領域。無人水下航行器的情報、監視和偵察(ISR)能力可以增強傳統上由操作員操作系統的能力,擴展系統在復雜環境下、高風險區域中、甚至是常規系統不能運行的淺水中的功率和識別能力。機器人技術對海洋監視領域的影響也取決于無人載具上有效載荷的搭載能力,如聲吶、水聽器、磁力計和光學或紅外照相機等各種傳感器的搭載能力。通過這些設備,無人載具能夠執行快速搜索任務,識別和定位受限區域內的水下目標和物體,這些受限區域包括碼頭、港口區域或感興趣的特定區域。
1 海底探測機器人
水下監視的一個核心領域包含對爆炸物和危險裝置的識別與定位能力。這些爆炸物和危險裝置包括簡易爆炸裝置(IED)、水雷和未爆彈藥(UXO)。水下簡易爆炸裝置代表日益增長的恐怖主義威脅,簡易爆炸裝置的高危風險區包括港口、錨地和進港路線等。水下水雷是布設在水中的爆炸裝置,目的是破壞或擊沉艦只或拒止艦只進入某一區域。它們可以在雷區使用,也可以單獨系留、漂浮、沉底或埋入。未爆彈藥是遺留在海底或舊的未爆炸物。它們對于已經存在的設施不是真正的問題,但是在建造新的基礎設施或清理新區域之前必須考慮。對政府而言,從海中清理未爆彈藥是一項新的挑戰性任務。雖然使用磁傳感器進行未爆彈藥探測具有多種優勢,但是考慮到未爆彈藥的異構性,近年來有研究提出可以考慮使用水聲傳感器,而且可以利用水雷對抗(MCM)已有的系統和算法執行未爆彈藥探測。
為了區別各種爆炸物和危險裝置的不同威脅,可以使用多種方法,從智能方法到只是簡單地在航行時選擇不同的路線。當然,檢查和監視海底是確認地區是否安全的一個基本步驟。傳統的做法是使用獵雷艇/掃雷艇或部署蛙人,在可能危險的區域內使用人力和昂貴的專用設備。使用諸如無人水下航行器之類的機器人的主要目的是降低操作員的風險,使他們遠離雷區:畢竟沒有人知道水雷是如何設定和引爆的,唯一安全的方法就是遠離爆炸物。
對人工智能(AI)的日益關注為自主潛航器(AUV)的使用開辟了新的場景。它們可以在沒有操作員監督的情況下完成更高級別的任務并做出一些決策。這具有雙重意義:一方面,通過限制潛航器需要交換的數據量,可以覆蓋影響水下域的通信空白,另一方面,它可以長久保持同樣強度的注意力,而不會遭受人類通常會有的壓力情況影響。
UUVs可以攜帶各種傳感器,比如可生成海底側視圖像的側掃聲吶(SSS)和合成孔徑聲吶(SAS)等聲學傳感器,或者是能夠生成三維地圖的(單波束和多波束)回聲測深儀。海底淺地層剖面儀(SBP)也可以用來檢查海底沉積。此外,前視聲吶(FLS)和聲學攝像機可根據特定的任務選擇使用。磁力計、光學照相機和激光掃描儀等磁傳感器可用于非常特別的應用。
使用成像聲吶(SAS、SSS和FLS)的UUVs可以利用圖像處理技術快速準確地發現目標。卷積神經網絡(CNN)可視為海洋領域中圖像分類任務的先進技術。水下域的一個大問題是難以通過一個傳感器收集得到精確的地理圖像,從而難以定位所發現的物體。水中無法使用GPS,解決方案是使用基于一個或多個水面網關以及水下定位和通信系統(如超短基線(USBL)、短基線(SBL)或長基線(LBL))的技術。雖然水下定位正在提供有希望的結果,變化探測(CD)也是一種有用的技術,它通過在不同的時間觀察一個畫面來確定物體或其他感興趣的現象隨時間的變化。在掃雷中,變化探測是一個重要的應用。在假設海底沒有水雷時,在航路勘測期間記錄戰略港口、入口或海上交通線的參考聲吶圖像。UUVs進行新的勘測后,僅在當前圖像中出現的物體會識別為水雷,從而降低了錯誤探測的可能性,并縮短了數據分析時間。
2 入侵探測機器人
監視應用于軍事和民事領域,相互交織,有時還相互重疊。例如,監視活動涉及軍用和民用的沿海基礎設施,包括造船廠和近海建筑。入侵威脅可能是蛙人或小型潛艇,而無人載具也應視為潛在的威脅。事實上,無人載具收集的音頻或圖像數據在針對水邊設施的戰略作戰中非常有用,而且它們可能攜帶爆炸物載荷,用于攻擊碼頭、商船和軍艦,在不對稱威脅中具有顯著優勢。此外,由于UUV的信號和目標強度都弱于蛙人的信號和目標強度,能夠更快速地機動,而且在更遠的距離上一直處于主動聲吶的探測閾值以下,因此UUVs也可能是潛在的入侵者。
目前正在研究不同類型的監視系統和策略。自20世紀80年代初以來,已經實施了各種水下安全項目來應對港口風險。它們大多依靠使用高頻主動聲吶,探測距離不足1公里。傳統上,水下監視任務由配備先進且昂貴的傳感器載人平臺完成,不僅成本高且工作量巨大。通過與水面和水下設備協同,UUVs可在水下監視中發揮主導作用。部署無人水面艇(USV)艇群進行巡邏勘探能夠非常有效地提高港口安全系統的性能。通過使用USVs艇群實施監視行動,優化攔截時間和位置,可為威脅攔截問題提供解決方案。關于UUVs艇群的控制問題可建立一個潛在博弈模型,模型中UUVs是對抗不對稱威脅的防御系統,可利用工具基于入侵者特征設計艇群的規模。歐洲的H2020 WiMUST項目框架提出了一種分布式可重構自主水下陣列的設計和實驗驗證。該系統由一組配備水聽器拖纜的協同機器人組成,用于采集海底數據,也可支持包括水聲監視在內的很多應用。北約海洋研究和實驗中心(CMRE)已經批準將協同機器人網絡用于水下監視應用。在一個實驗中,兩個配備水聲傳感器的協同UUVs各自生成軌跡,軌跡經實時分類,并在這兩個UUVs和一艘作為高價值設備的艦只(HVA)之間共享,它們都完全集成到網絡中以便生成戰術圖形。由于電磁波入水后會強烈衰減,因此基于聲波的水下監測成為監測水下環境最常用的方法。水下監視場景的一個例子如圖1所示。
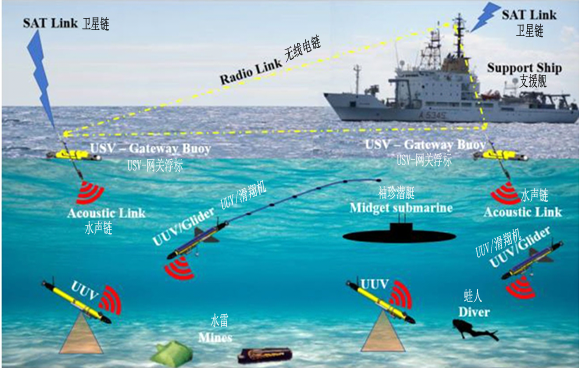
圖1 基于無人系統的水下監視概念場景
圖1是一個UxV網絡,每個UxV都搭載一個或多個特定的有效載荷且執行特定的任務,它們通信、采集數據并進行實時監測。水下和空中環境之間的通信基礎設施由USVs來保證,這些USVs充當網關浮標(即配備了聲學和無線電調制解調器)。支援艦由NRV聯盟號代表,它是一艘執行廣泛海洋活動的北約科研船,可以充當指控系統。在圖1中,UUVs裝備了用于入侵者探測的矢量傳感器和/或水聲陣列,其中有一些裝備了側掃聲吶有效載荷用于海底勘探。
在監視應用中有些方法是采用聲矢量傳感器定位水下聲源,它們與傳統的水聽器相比能夠提供噪聲目標的方向信息,從而增強監視能力,因此廣受關注。此外,它們體積小、重量輕、功耗低,適合在UUVs上使用:它們能夠通過一個簡易的傳感器提供與拖曳式水聽器拖纜一樣的信息,這個簡易的傳感器安裝簡便且可以通過海洋機器人部署。目前矢量傳感器的缺點是對機器人運動太敏感,因此必須在原始數據中進行補償。一種雙軸加速度矢量傳感器已開發應用于美杜莎級(MEDUSA)AUV上。雖然這是為地球物理勘測設計的,但這一概念也可用于聲學監測應用。北約海洋研究和實驗中心將一個商用矢量傳感器集成到斯洛克姆(Slocum)水下滑翔機上,目的是證明UUVs能夠生成精確的目標方位,實驗得到的結果可能代表其開啟了將多架水下滑翔機集成到機器人監視網絡的先河,這些滑翔機上都搭載了先進的傳感器。有關方位估計的實驗結果已發表,方位估計使用了安裝在eFolaga混合式AUV上的定向頻率,分析和記錄(DIFAR)聲吶浮標矢量傳感器。研究人員已開發出的系統在多目標方位估計方面表現出非常有吸引力的性能,為機器人水下監視提供了一個新工具。北約海洋研究和實驗中心開發了一種可進行全方位觀察的立體陣列,它已安裝在斯洛克姆滑翔機的機頭上,以解決特定海域的海上交通監控問題。
3 水下監視的主要研究前沿
考慮到水下通信和聯網問題,最新的研究方向是放棄靜態和單片內置調制解調器和連接堆棧,轉而采用軟件定義的認知自適應解決方案。軟件定義開放式架構調制解調器(SDOAM)的使用帶來了巨大的優勢,它能夠根據非線性和多變的聲學信道的情況來校準所有通信參數(如波形、頻率、編碼)。近期的研究進展已展示出它是如何根據網絡需求和潛航器任務情況適應此類調制解調器的運行,不僅考慮到了具體的信道指標,而且是在極短的反應時間內。為了有效地使用軟件定義的調制解調器,在通信協議棧的上層也需要采用認知的和自適應的方法。目前已經開發了幾個網絡架構解決方案,重點是對不同層次執行的任務進行精細同步。這些解決方案已在AUVs上成功應用,并進行了海試。北約海洋研究和實驗中心自2011年以來一直致力于這項技術的研究、開發和推廣。北約海洋研究和實驗中心通信棧正在發展成為一個可建立智能的、自適應的和安全的水下網絡的全認知通信架構(CCA)。
此外,科學界、軍方最終用戶和工業界越來越關注多載具作戰、有人-無人互操作性和(賽博)安全。互操作性取決于許多相互關聯的主題,如自適應自主通信網絡、機器人系統之系統(SoS)的指揮和控制系統(C2S)以及互操作性的持續標準化。從互操作性標準化的角度來看,有兩個非常重要的北約標準值得關注:即NATO STANAG 4586和4748。首先,STANAG 4586是目前的無人機標準,這是一項新研究的起點,旨在建立“聯合”多域(即無人空中、陸地和海上系統)控制站(MDCS)標準。將來,由行業和政府代表組成的MDCS工作組將正式發布STANAG 4586修訂版。其次,北約海洋研究和實驗中心與學術界和工業界一起開發了一個稱為JANUS標準的水下通信協議,最近已被北約批準為STANAG 4748標準。這是第一個國際認可且開放獲取的水下數字通信標準,已經在海上廣泛應用于自動識別系統(AIS)數據交換以及向潛艇傳輸氣象和海洋學數據。得益于標準化方法的使用,只要符合JANUS標準,即使是使用來自不同廠家的異構和混合系統,也將有可能提高用于機器人監視的海上態勢感知(MSA)功能水平。
因為攻擊者很容易破壞或攔截此類網絡中的通信,水下水聲信道固有的廣播特性給諸如自主機器人監視之類的敏感任務帶來了巨大的賽博安全風險,在無線電射頻域中擴頻信號的使用就與此類似。相比之下,在聲學消息中密鑰的使用不能輕易地適用于水下環境。因此,一個有趣的概念是物理安全概念,即根據信道的可變性通過控制信號本身來生成密鑰。有人提議為水下水聲通信網絡專門設計一個安全框架,這個想法已在歐洲的UAN項目中實施。需要指出的是,協同機器人網絡也可以利用其自身的多用性和自適應能力來應對賽博威脅。
在此背景下,不管海情如何,機器人監視系統也需要無限期地持續存在,并同時保持高效。這種長期的使用需要開發創新的布放和回收系統(LARS),以及能夠在海上一天24小時獲取能量的停泊站。它們涉及許多工程問題,需要在水下域特別關注解決。監視用航行器編隊的簡單布放和回收通常很困難,而且一般要求船只配備足夠的起吊和動態定位(DP)系統。研究人員必須為自主布放、停泊和補給尋求扎實可信和可擴縮的工程解決方案,以確保充分的持久性并減輕支援船的工作量。迄今為止,研究人員在提高持久性方面面臨的主要挑戰之一是水下航行器的精確定位,隨時間變化的漂移誤差限制成為執行監視這一類長期任務的一個重要障礙。水下滑翔機執行任務的持續時間將從幾個小時延長至幾天甚至幾個月,通過提高電源和推進系統的效率來降低載具的能耗是最基本的要求。一種補償方法是在近海停泊站執行任務期間給載具的內部電池充電。一個更靈活的想法是給載具配備一個能夠從周圍環境中獲取能量的便攜式設備,只是這種想法迄今為止幾乎還沒有研究過。就此而言,波浪能特別合適,因為理論上波浪能不受時空限制,雖然能量轉換過程非常困難。還有一項研究是用于海洋勘探的波浪動力自主航行器(WAVE)項目,最終目標是研究、開發并在海上測試一種新的波浪能采集和低能量推進系統,該系統將集成到一種外形類似魚雷的通用、模塊化AUV中。
審核編輯 :李倩
-
傳感器
+關注
關注
2548文章
50713瀏覽量
752112 -
機器人
+關注
關注
210文章
28224瀏覽量
206597
原文標題:用于水下監視的海洋機器人
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論