 機器視覺基本概念學習筆記5
機器視覺基本概念學習筆記5
3、鏡頭(lens)
人類的視覺是依靠眼睛中的晶狀體將景物的像投影在視網膜上,“花花世界”才被人類感知。相機中的傳感器(CCD或CMOS)相當于人眼中的視網膜,那么鏡頭就相當于晶狀體,必須通過鏡頭來攝取世界萬物,人類的眼睛如果焦距出現誤差(近視眼),則會出現無法正確的分辨事物,同樣作為數碼相機的鏡頭,其最主要的特性也是鏡頭的焦距值。鏡頭的焦距不同,能拍攝的景物廣闊程度就不同,照片效果也迥然相異。
鏡頭一般都由光學系統和機械裝置兩部分組成,光學系統由若干透鏡(或反射鏡)組成,以構成正確的物像關系,保證獲得正確、清晰的影像,它是鏡頭的核心;
而機械裝置包括固定光學元件的零件(如鏡筒、透鏡座、壓圈、連接環等),鏡頭調節機構(如光圈調節環、調焦環等),連接機構(比如常見的C、CS接口)等;此外,也有些鏡頭上具有自動調光圈、自動調焦或感測光強度的電子機構。
鏡頭按焦距大小可以分為長焦鏡頭、標準鏡頭、廣角鏡頭等;按用途通常可以分為安防用鏡頭(CCTV lens)、工業自動化鏡頭(FA lens),廣播級別的鏡頭(Broadcast lens),高清晰電視用鏡頭(HD lens);機器視覺行業內通常將鏡頭分為宏鏡頭(macro lens)、定倍鏡頭(fixed-mag lens)、變焦鏡頭(zoom鏡頭)、遠心鏡頭(telecentric lens)、高精度或百萬像素鏡頭(High Resolution or million pixels lens)等。
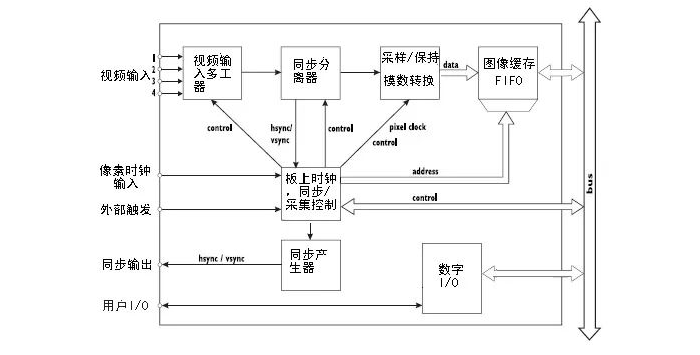
當然,這些分類并沒有嚴格的劃分界線。對于鏡頭有關的光學參數我們可以將焦距f、光圈系數(相對孔徑)、像方視場(即支持的CCD芯片大小)以及像差(比如畸變、場曲等)看作鏡頭的內部參數,而圖3.3.1所示的是一個簡單視覺系統的鏡頭外部主要參數需求,通常是用戶搭建視覺系統所最關心的,主要包括視場(FOV)、分辨率(Resolution)、工作距離(WD)和景深(DOF)。
為了解釋清楚鏡頭參數,讓我們先簡單的介紹一點光學基礎。圖展示了鏡頭成像的基本性質,圖中a所示假設發光體位于無限遠處(無窮遠處物體所發光被認為是平行光),放置鏡頭與這些平行光垂直,這些光線將聚集在一點,這一點就是所謂的焦點。換句話說,焦點是無限遠處光源的映射。
鏡頭與焦點之間的距離成為焦距f。因此,如果我們想要獲取一個CCD傳感器上的無限遠的物體,鏡頭與傳感器的距離就會正好是鏡頭的焦距。如果將發光體移近鏡頭,如圖中b所示,鏡頭就將光線聚焦在焦點前面,因此如果要獲取尖銳的圖像,就必須增加鏡頭與傳感器的距離。這不僅僅應用于理想的薄透鏡,也可以應用于實際由多鏡片組成的復合鏡頭。
當鏡頭應用于高精度的檢測場合時,必須清楚理想薄透鏡公式與實際透鏡組計算公式。對于一般的應用,理想薄透鏡或是小孔成像原理可以被應用到一般的視覺系統中。因此,鏡頭對焦意味著改變鏡頭本身與CCD傳感器的距離,距離改變靠機械裝置進行約束。
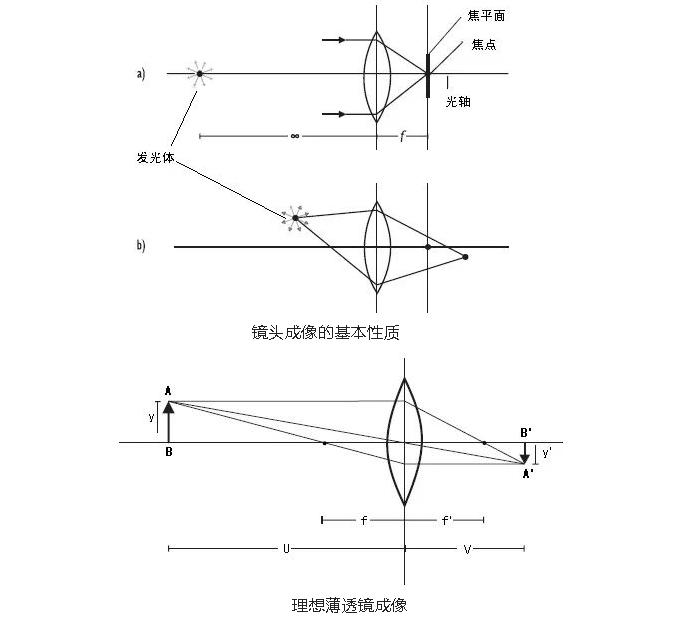
理想薄透鏡成像
而上圖所示的高斯公式則是對于理想薄透鏡的基本透鏡公式。在平常使用中,我們經常需要決定焦距。其基本公式為:
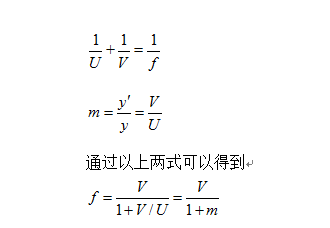
其中,V和U分別是鏡頭光心到圖像傳感器的距離和鏡頭光心到物體的距離,和分別是圖像的大小和物體的大小。V與U之比就是放大因子(或稱放大倍率)。
對成像理論進行簡單介紹之后,接著對鏡頭參數進行介紹。對于普通用戶最直觀的2個內部參數分別是焦距、光圈,不少鏡頭這2個參數都是可調的(還有一個外部參數:工作距離在有些鏡頭上也是可調的)。對同一芯片尺寸的相機,視場角則可以看作焦距的另一種表達,它與焦距的關系式為:,這里,是CCD傳感器的一個維的長度(水平、垂直或對角方向)。有時鏡頭可以根據它的視角來分類,實際上這一分類并不很嚴謹。按視場角對鏡頭比較典型的分類如下:
| 光學系統 | 望遠物鏡 遠距攝像鏡頭 標準鏡頭 廣角鏡頭 超廣角鏡頭 |
|---|---|
| 視場 | 6° 12° 46° 65° >100° |
焦距(視場角)不僅僅描述鏡頭的屈光能力,且可作為圖像質量的參考。一般鏡頭失真隨著焦距的減小(或視場角的增大)而增大,因而選擇測量鏡頭,不要選擇小焦距(小于8mm)或大視場角的鏡頭。此外,即使不是變焦(ZOOM)鏡頭,普通鏡頭上也會有一個調焦環,但如前面提到的它沒有改變鏡頭的焦距f,而只是改變鏡頭光心到圖像傳感器的距離V,從前面的公式可以看到這樣同樣可以改變鏡頭的放大倍率。
光圈系數是鏡頭的重要內部參數,它就是鏡頭相對孔徑的倒數,一般的廠家都會用F數來表示這一參數。例如,如果鏡頭的相對孔徑是1:2,那么其光圈也就是F2.0。而在相機的鏡頭上,都會標寫上這一指標。而由于光圈系數是相對孔徑的倒數,因此,如果光圈系數的標稱值數字越大,也就表示其實際光圈就越小。一般來說,鏡頭的光圈排列順序是:1、1.4、2.0、2.8、3.5、4.0、5.6、8.0、11、16、22、32等等。隨著數值的增大,其實際光孔大小也就隨之減小,而其在相同快門時間內的光通量也就隨之減小。當然,有些視覺系統為了增大鏡頭的可靠性和降低成本,采用的定光圈設計,光圈不能改變時調整圖像亮度就需要靠調整光源強度或相機增益。
像方視場(即支持的CCD芯片大小)同樣是鏡頭的重要內部參數,CCD芯片尺寸在相機一節就已介紹,通常大小為1/3”, 1/2”。不同芯片規格要求相應的鏡頭規格。鏡頭的設計規格必須等于或大于芯片規格,否則就會出現如圖所示的后果,在視場邊緣會出現黑邊。特別是在測量中,最好使用稍大規格的鏡頭,因為鏡頭往往在其邊緣處失真最大。
作為鏡頭內部參數的像差,在機器視覺應用中最為關鍵的是畸變(變形率)和場曲(用于傳感器接受的鏡頭該參數已被嚴格校正)。畸變會影響測量結果,特別是在精密測量中,還必須通過軟件的方法進行標定和補償。如圖3.3.5所示,畸變主要分為兩種:桶形畸變(Barrel)和枕形畸變(Pincushion),圖中虛線方框表示物體應該成的理想像,很明顯,畸變沿鏡頭徑向變化并不是線性的,通常在視場邊緣畸變最大,用于測量的鏡頭最大畸變需要小于1%。

鏡頭畸變
再接著闡述的鏡頭光學參數是與客戶選擇比較相關的外部參數,首先是視場(FOV),可以通過以下兩個公式進行計算,式中V和H分別表示垂直和水平方向,M表示光學放大倍率,f表示焦距,WD表示工作距離。

然后對于鏡頭的分辨率則不能與相機的分辨率混為一談,對于鏡頭,它的極限空間分辨能力受系統衍射極限的影響,按照瑞利判據,物鏡的光學極限分辨距離為:
式中為波長;NA為物鏡的物方數值孔徑;n為物方介質折射率,這里是空氣n=1;U為物方半孔徑角的。對于相機的分辨率則在前面的相機一節有過介紹( FOV(V or H)/CCD像素數(V or H)),是一個與鏡頭分辨率無關的量,它們兩者可以按Nyquist的采樣理論聯系起來,這里不再詳述。那視覺系統的系統分辨率應該按哪個公式計算呢?很簡單,系統分辨率應該是兩者中小的那個,又由于鏡頭的分辨率一般都比相機分辨率高,因此絕大多數視覺系統都是按FOV與CCD像素數的比值來計算視覺系統的分辨率。
工作距離往往在視覺應用中至關重要,從公式中可以看出它與視場大小成正比,有些系統工作空間很小因而需要鏡頭有小的工作距離,但有的系統在鏡頭前可能需要安裝光源或其它工作裝置因而必須有較大的工作距離保證空間,通常FA鏡頭與監控鏡頭相比,小的工作距離就是一個重要區別。
景深則是鏡頭另一個重要的外部參數。它表示滿足圖像清晰度要求的最遠位置與最近位置的差值,景深的計算可能會相對麻煩一些它與鏡頭焦距、光圈值、工作距離和允許彌散斑的最大直徑有關。由于允許彌散斑的最大直徑是個相對量,它的可接受直徑很大程度上取決于應用,因此在實際視覺應用中以實驗和參考鏡頭給出的參考值為主。
簡單的說,光圈越小,景深越深;焦距越短,景深越深;對焦距離(工作距離)越遠,景深越深。
在本節前面介紹表明鏡頭光學參數從技術的角度多是可選的。但實際商品化的鏡頭總是只是某些參數的標準產品,如果需要完全滿足系統的要求可能需要定制鏡頭,這樣價格就比平常應用貴很多。因此,很多時候鏡頭參數選擇要分清自己視覺系統應用中的哪些是必須保證的,哪些是可以通過其它的方法折中的。
鏡頭接口
除了前面討論的光學參數,實際上對于鏡頭我們需要處理一些額外的參數。首先有很多方法在相機上安裝鏡頭,幸好機器視覺由C接口和CS接口的鏡頭和相機主導,比較例外的是高像素數的線掃描相機(2048像素以上),它需要比C接口鏡頭提供的圖像格式更大,在這種情況下,通常利用的是尼康的F接口。
C接口與CS接口鏡頭唯一的區別就是他們背焦距。對C接口背距是17.5mm,對CS接口背距為12.5mm。因此,對C接口鏡頭可以增加一個5mm的擴展管,就可得到CS接口鏡頭。由于C接口標準是國際接受的,有很多鏡頭可供選擇。對于這一規則有一重要例外:C接口的3CCD相機不能和C接口鏡頭協同工作。從機械的角度,各種C接口鏡頭的背焦距太長。另外,C接口鏡頭的光學特性不能總適合3CCD相機。因此,需要考慮相機廠商提供的兼容性列表。圖所示就是C接口與CS接口之間正確的匹配和不正確的匹配方法。
遠心鏡頭

普通的鏡頭與人眼一樣,由于視場角的緣故看物體都存在“近大遠小”的現象,如果這樣的鏡頭用在測量系統中,物距常發生變化,從而使像高發生變化,所以測得的物體尺寸也發生變化,即產生了測量誤差;另一方面,即使物距是固定的,也會因為CCD敏感表面不易精確調整在像平面上,同樣親會產生測量誤差。為了解決上述問題,可以采用遠心物鏡。其中像方遠心物鏡可以消除物距變化帶來的測量誤差,而物方遠心物鏡則可以消除CCD位置不準帶來的測量誤差。下面的表格對傳統鏡頭與遠心鏡頭進行了簡單對比。

擴展鏡或延伸管
很多鏡頭為了適應更多的應用環境,常常在鏡頭中預留位置或在鏡頭兩端預留螺紋,以方便擴展鏡頭用。這里所說的擴展鏡是個廣義的概念,可以指增倍鏡,可以是濾光鏡、偏振鏡或差分鏡,可以是轉軸鏡,可以是與延伸管功能類似的微距鏡(減小工作距離),還可以是用以實現同軸照明的半透半反鏡。具體的選擇需要根據您的需要詢問鏡頭供應商。
對于一個光學鏡頭的性能評估通常用分辨率(resolution) 、對比度(contrast)、像差(aberration)、MTF(modulation transfer function)、色彩平衡性(color balance)、周邊光量(Peripheral illumination)、漸暈 (Vignetting)、光斑(flare)、鍍膜(coating)等參數進行衡量,雖然這些與視覺成像有很大關系,但作為機器視覺的應用者,應該把這些參數的保障交給鏡頭生產者,而自己主要是選擇合適的鏡頭類型并保證視場大小和分辨率要求,此外與視覺應用比較相關的還有工作距離、景深、畸變、均一充分的亮度、耐振蕩沖擊性和鏡頭本身的尺寸規格。
-
圖像處理
+關注
關注
27文章
1282瀏覽量
56647 -
機器視覺
+關注
關注
161文章
4345瀏覽量
120115
發布評論請先 登錄
相關推薦
人工智能基本概念機器學習算法
什么是機器學習_十張圖帶你解析機器學習的基本概念






 工商網監
工商網監
評論