 機器視覺基本概念學習筆記7
機器視覺基本概念學習筆記7
模擬采集卡采樣精度與速度
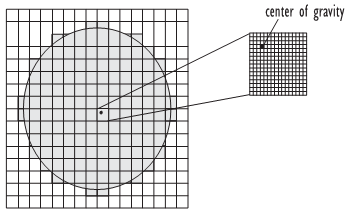
模擬采集卡的數字化精度主要包括兩個方面即像素抖動(在相機一節已詳細介紹)是由圖像采集卡的A/D轉換器的采樣時鐘的誤差產生的像元位置上的微小的錯誤從而導致對距離測量的錯誤。 (2) 灰度噪音Grey-Scale Noise灰度單元,圖像采集卡的數字化轉換的過程包括對模擬視頻信號的放大和對其亮度(灰度值)進行測量。在此過程中會有一定的噪聲和動態波動由圖像采集卡的電路產生。如像素抖動一樣,灰度噪聲將導致對距離測量的錯誤。典型的灰度噪聲為0.7個,表示為0.7LSB。
數字采集卡要考慮數據率大小,計算數字采集卡的數據率是否滿足系統的要求可按下列公式計算:
Data Rate(Grabber)>1.2×Data Rate(Camera)
Data Rate(Camera)=R×f×d/8
式中Data Rate(Grabber)為采集卡的數據率,Data Rate(Camera)為相機的數據率,R為相機的分辨率,f為相機的幀頻,d為相機的數字深度(或稱灰度級)。
非標準視頻獲取
很多機器視覺應用相機輸出并非標準的視頻信號,相應的圖像采集卡就也必須提供一些視頻標準以外的特性。下面就描述了三種典型的非標準采集卡:
①由視頻標準定義的最大圖像分辨率對于大多數應用是足夠的,因此一種非標準采集卡就是將視頻標準,比如說像素時鐘、觸發機制、逐行掃描更加細化。與RGB相機共同使用的采集卡通常用于同時獲取高達三種顏色的視頻信號(這三個通道可以不必代表通常的紅、綠、藍信號)。用這種方法,就可以實現立體的視覺系統。而且,一些特殊的相機提供兩路視頻輸出來加倍掃描速率并且能夠與RGB采集卡相連。
②第二種非標準采集卡并不像第一種那樣遵循視頻標準。他們自適應幾乎所有的非標準相機,比如說線掃描相機、數字相機、以及提供超出視頻標準分辨率的相機。非標準視頻可以是以下特性的組合:
-
非標準時鐘
不遵循標準視頻時鐘的視頻信號不能用傳統的圖像采集卡和標準譯碼電路來處理。輸出比幀速率比標準個數多或少的相機(雙倍速度相機和百萬像素相機)或者當要處理觸發、變化掃描設置,將會在以后討論。
-
非標準或百萬像素分辨率
先進的相機開始在傳感器上有越來越多的像素從而圖像的分辨率會變大。CCIR標準指出,具有百萬像素的相機其1024768、13001030或更高的分辨率已經超過了傳統的768*576的分辨率,它能夠提供給定分辨率下更大的視野范圍。
-
逐行掃描輸出
逐行掃描在相機一節曾有介紹,它是指整個圖像而不是一半的圖像在一個事件當中同時計算。結果就是完全的處置分辨率非隔行視頻,對捕獲具有最大分辨率的高速運動物體的圖像很適用。大多數制造的CCD傳感器是隔行掃描類型的,以適應于監視和電視型的應用。
因此,逐行掃描相機比隔行掃描相機價格要貴,并且更適用于機器視覺。使用逐行掃描相機時,快速運動物體的圖像也可能是模糊的。這是因為視頻中的圖像是在一個時間段(曝光時間)內積累的結果,在這過程中物體可能已經移動。為降低模糊,可以用一個電子快門來縮短曝光時間。
這在35mm攝影相機中機械的完成,在CCD相機中電子的完成。當電子快門速度提高時,曝光時間就縮短,物體在很短的時間中被拍攝,因而能減少模糊。大多數機器視覺應用都時利用這種技術,盡管少的曝光時間意味著由于少的光照到傳感器上,相機變得不敏感。
當電子快門達到一個較高的速度,就需要更高的光密度,這也能夠有快的,低的F數鏡頭來輔助完成。只有在采集卡本身能夠被用戶配置的情況下,才有可能實現這么高的靈活性。因此,這種采集卡通常配有特殊的能夠產生相機描述文件的配置程序,描述文件被采集卡驅動程序用來配置采集卡。
③盡管如今的PC機性能已經很高,對于一些圖像序列的處理,它還是不夠的。因此,就需要額外的計算能力。為了達到這個目的,高終端的圖像采集卡就配有一個或多個信號處理器,能夠做CPU的圖像預處理。顯然,這種采集卡成功的應用是需要很多經驗的,另外,實際采集卡的復雜度以及信號處理器的開發環境就產生很高的需求。
接口制式,數據格式
目前相機的接口形式包括模擬接口(PAL、NTSC、CCIR、RS170/EIA、非標準模擬制式),數字接口(Camera Link、Channel Link、LVDS/RS422)和議一些直聯式數字接口(IEEE 1394、USB、以太網Ethernet)定與視覺系統所選用相機一致,如選用數字制式還必須考慮相機的數字位數。(模擬信號及接口前面已經介紹)
RS-422 及RS-644(LVDS)接口
RS-422 及RS-644(LVDS)通常是68pin 或 100pin 的高密度接口, 但各相機廠家的引腳定義不盡相同而且采集卡引腳定義也不太一樣, 因此在選定相機及采集卡后,需要更換其中的一者都必須先看看引腳的信號的定義,也許需要重做信號線或做一個信號轉換板。
Channel Link 接口
Channel Link是Camera Link的前身,能夠與其兼容,接口的引腳較LVDS少了很多卻仍然可以傳輸大量的數據,它也沒有統一的標準接頭形式, 因此各廠家的產品之間依然有差異。
Camera Link接口
Camera Link標準則是由多家工業相機和采集卡大廠共同制定出來的, 標準本身是基于Channel Link 的特性, 并定義了標準的接口, 讓相機與采集卡之間的信號傳輸更加簡單化了,同時定義了基本架構(Base Configuration), 中級架構(Medium Configuration), 及完整架構(Full Configuration) 的信號引腳規范和傳輸資料量。
IEEE 1394
IEEE 1394接口,(通常也被稱為FireWire或者iLink)。因為可得到的帶寬被分配到需要它的全部設備,在節點上的最慢的設備將決定整個傳輸網絡的帶寬。 IEEE1394a是目前實現的版本。它支持100,200,和400 Mbit/s的帶寬。
而IEEE 1394b是一個新興的標準但還沒被廣泛地支持,它提供一個800 Mbit/s的帶寬,最多可達3.2 Gbit / s。 1394有兩種工作方式:異步(asynchronous)方式和同步(isochronous),異步方式的設計主要是保證信息傳遞的可靠性,并非保證高的傳輸速度,它在數據的發送和接收之間通過“握手”以保證被傳送的數據被收到;
而同步方式則會保證帶寬,它必須犧牲握手個過程而沒有保障數據被收到。如果可提供的帶寬被給予一個同步的設備,然后設備可以每125us發送一包數據。數據包的長度由指定設備的保留的帶寬確定。
同步設備把數據送到一個通道,其它設備都可以通過該通道同步接受數據包。如果數據包損壞或丟失,也不能重新傳送。大多數1394接口的工業相機采用同步方式并且遵循DCam協議(或稱IIDC協議)。
USB
普通串口總線(USB)是一個主從系統用于點對點通訊,目的是作為一種通用標準來取代現有的各種串行或并行的計算機I/O 協議。主控制器擔任主機,端點的其它外部設備隸屬于它, 下位USB設備只能與主機(通常一臺計算機)聯系,但其它設備相互間不能通信。
USB 1.1提供一個只12 Mbit/s的帶寬,因此,不太適合工業相機的圖像傳輸。有480 Mbit/s的可提供的帶寬的USB 2.0則完全能達到工業相機的數據傳輸速度需求。 USB也采用與1394同步方式類似的數據傳輸方式。
USB的同步方式每125us發送一包數據。數據包長度確定設備分配到的帶寬。與1394一樣,不可能實現握手,因此也只是保證帶寬而沒有保證信息傳輸的完整。
同步方式數據傳輸可以達到90%可得到的帶寬。即一部相機能請求并且被準許480 Mbit/s中的90%(理論上,8 位像素圖像傳輸率為54 Mpixel/s)。但一些其它的總線開支通常降低可提供的帶寬到實際40 Mpixel / s左右。
以太網Ethernet
作為一個局域網絡協議,它起先被美國施樂公司開發,后來在與DEC和Intel合作中獲得來巨大改進,Ethernet接口使用總線形或者星形結構學并且支持數據傳送率達到 1 Gbit/s,但是,最通常使用的100baseT版本只能提供100Mbit/s的總線帶寬。
Ethernet使用載波監聽多路訪問/沖突檢測(CSMA/CD)存取方式。因為Ethernet允許任何設備給任何其它或全部設備隨時發送數據且無需協調,數據沖突的潛在可能就會隨著網絡使用設備和被傳送數據的數量增大。
CSMA/CD每當數據傳輸沖突時指定再試,直到數據到達最后的目的地。即使有其它網絡設備,例如開關和路由器,當在一個網絡上有超過兩個設備時,沖突的潛在可能被大大降低,但也不能達到理論的帶寬(100Mbit/s)。
100Mbits/s的理論帶寬的100baseT 通常有效的數據傳輸速度為50Mbit/s,在考慮節點開銷和沖突之后,對8位的圖像數據只能達到6.25Mpixel/s,不適應多數機器視覺的應用。 由于千兆位Ethernet(1000baseT)的來臨,帶寬可增加到1,000Mbit/s(1Gbit/s)但其工業目的的未壓縮圖像數據傳輸協議標準目的沒被完全確定。
因此,視頻制式與接口的選擇需要與相機一起進行綜合考慮,此外,雖然目前一起直連相機(比如USB和IEEE1394)存在著價格較低,但考慮到復雜視覺系統對一些控制功能的需求和圖像傳輸可靠性,因而直連相機并不是大多數工業應用的最佳選擇。
附加功能
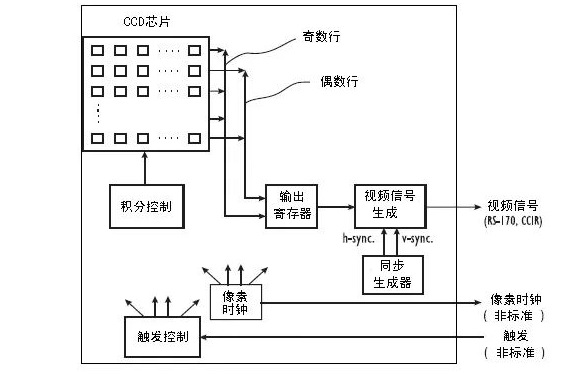
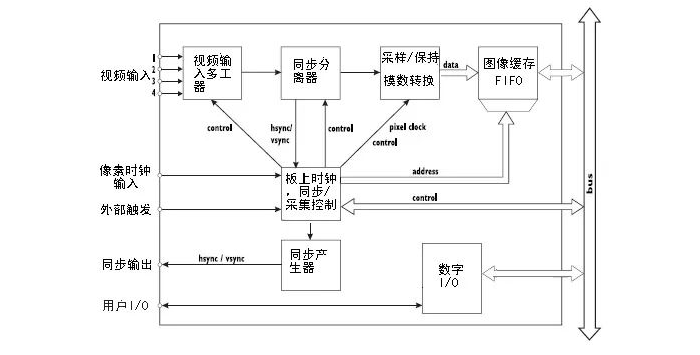
圖像采集卡為了方便視覺系統的應用,通常會增加一些有別于單純圖像采集的附加功能,在機器視覺系統中,輸入/輸出的控制很重要,系統中常要根據處理過程的需要來決定相機的拍照時間,采用了可異步重置的相機,則需要輸出觸發相機的信號。
此外,在一些系統中,由于需要設定拍攝的幀率,應該有像素時鐘發生器。外同步是指不同的視頻設備之間用同一同步信號來保證視頻信號的同步,它可以保證不同設備輸出的視頻信號具有相同的幀行起止時間。
為了實現外同步,需要給攝像機輸入一個復合同步信號或復合視頻信號。如果圖像采集卡已經具有數字 I/ O功能,能夠產生攝像機和其他電子設備所需的選通、觸發及其他電子信號,對系統是很有用的,否則將需要獨立的數字 I/ O卡。
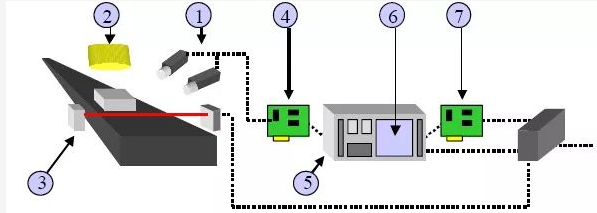
比如圖中所示的同步輸出、像素時鐘輸出、外部觸發輸入和用戶自定義的數字 I/ O,此外還有的采集卡會提供RS232串口控制和相機電源輸出等。
硬件可靠性以及軟件支持
硬件的可靠性在生產系統中是十分重要的,由設備故障而停產造成的損失遠遠大于設備本身。很多板卡廠家并沒有標明如平均無故障時間等可靠性指標。這里有兩個經驗性的技巧用以評估不同板卡的可靠性,板上的器件的數量和功耗。
試著去選擇具有更低功耗的采集卡。在其它條件都同等的情況下一塊復雜具有更多器件的卡會比器件較少的卡耗散更多的熱量。好的設計會采用更多的ASIC(Applica tion-specific integrated circuits)和可編程器件以減少電子器件的數量,而達到更高的功能。
您還可以選擇具有更少的無用功能的卡以減少不必要的麻煩。過壓保護是可靠性的一個重要指標。接近高壓會在視頻電纜產生很強的電涌,在視頻輸入端和I/O口加過壓保護電路可保護采集卡不會被工業環境電磁干擾會產生的高壓擊穿。
基本上所有的圖像采集卡都支持二次開發,通常隨圖像采集卡都附送一些采集、存儲、顯示相關的函數庫,而圖像處理相關的函數庫雖然需要得到響應的硬件支持但往往都是另外銷售的,因此在選擇采集卡的同時還必須考慮此視覺系統要選用的軟件與采集卡是否兼容,是否使用方便,其軟件是否要求付費等。
比如Matrox公司的Mil和MilLite可以在它們的大多數卡上使用, Dalsa Coreco公司的圖像處理軟件WIT、Sapera、MVTools等只能在其Bandit系統、PC系列、X64系列、Viper系列等采集卡上使用,而Cognex公司的Vision Pro只能在其8100、8500系列采集卡上運行。此外,像HexSight這類通用視覺開發軟件,則可以支持市面上的大多數采集卡。
-
圖像處理
+關注
關注
27文章
1282瀏覽量
56647 -
機器視覺
+關注
關注
161文章
4345瀏覽量
120115
發布評論請先 登錄
相關推薦
人工智能基本概念機器學習算法
什么是機器學習_十張圖帶你解析機器學習的基本概念






 工商網監
工商網監
評論