 STM系列CANopen通信一體化步進電機電機快速使用教程
STM系列CANopen通信一體化步進電機電機快速使用教程
前面的文章中我們講了【上位機連接教程】STM系列CAN通信一體化步進電機電機快速使用教程,本次我們來說說CANopen通信的步進電機如何快速連接上位機。
本教程適用于立邁勝STM系列CANopen通信一體化步進電機電機上位機連接調試。本文所用軟件與說明書獲取方式在文末處說明。
一、環境搭建
軟件環境準備
1.安裝NimStudio上位機調試軟件,按照提示說明進行安裝。
(參考《SCM-USBCAN-LB&SCM-USBCANI-LB 通信轉換器產品使用說明書》進行轉換器驅動的安裝)
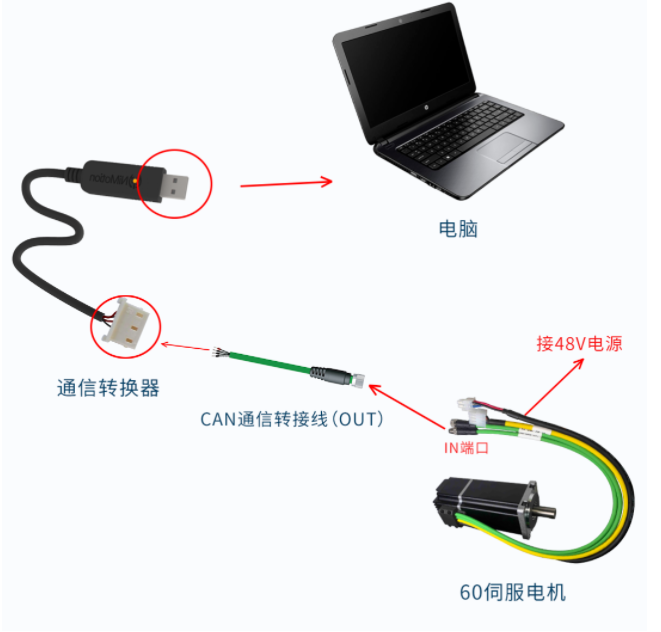
硬件環境準備
1.將“USB轉CAN轉換器”一端插到電機通信接口,另一端插電腦USB接口。
2.電機直流供電(根據電機使用說明書,對應電機型號在額定范圍內直流供電)。
下圖為電機接線圖(以42電機舉例,28/57/86通用)

二、建立通訊
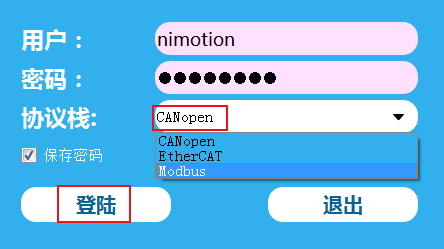
1.打開NimStudio軟件,選擇“CANopen”通訊后點擊“登錄”,如下圖所示。
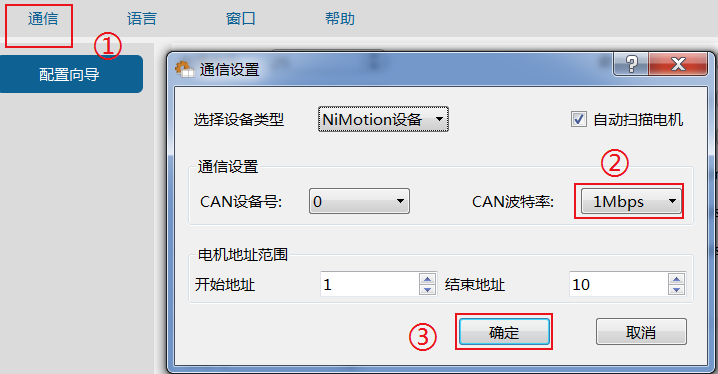
2.在軟件界面左上角選擇“通信”點擊“打開”,波特率選擇“1Mbps”(默認1Mbps),點擊“確定”進入界面,如下圖所示。
3.通信成功后的界面如下圖,CANopen主站下會有電機出現,如下圖中左下角的“1號電機”。

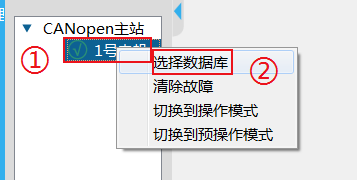
4.加載數據庫:在“1號電機”處右擊,點擊“選擇數據庫”后,進入文件夾,選中“STMxx_zh”后點擊“打開”,如下圖所示。

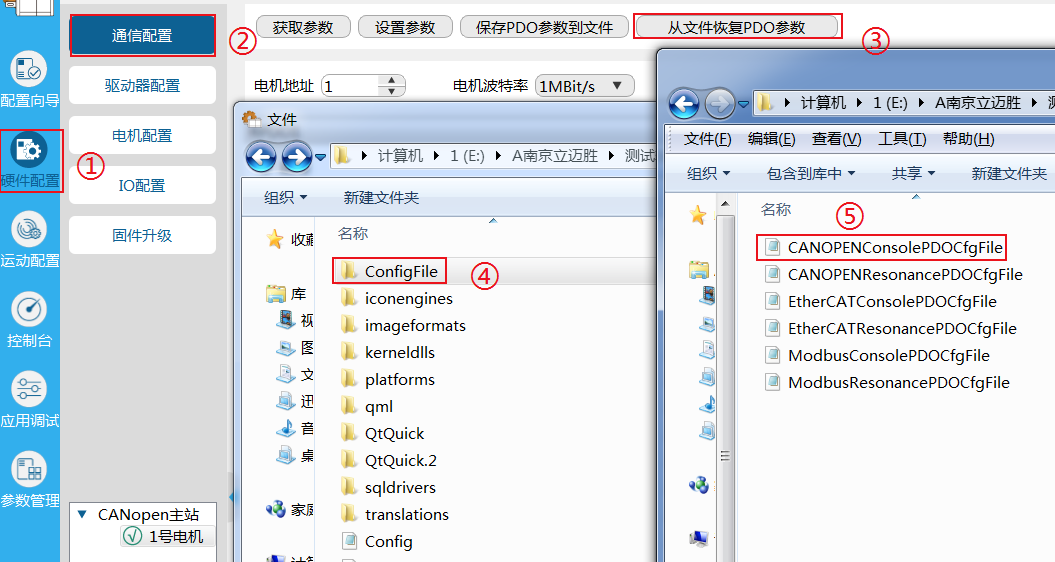
5.恢復PDO參數,操作步驟如下:
①點擊“硬件配置”
②點擊“通信配置”
③點擊“從文件中恢復PDO參數”
④打開文件夾“ConfigFile”
⑤選擇“CANOPENConsolePDOCfgFile”并打開,如下圖所示。
三、電機運行示例
輪廓位置模式運行
控制流程如下:
首先,
①點擊“運動配置”
②點擊“模式配置”
③選擇“CIA402模式”
④選擇“輪廓位置模式”
⑤點擊“設置到該模式”,如下圖所示

完成運動配置后,進行以下操作
①點擊左側“控制臺”
②選中已顯示的電機“1號電機”
③給定位置值,如“40000”
④點擊“啟動”
⑤選擇“相對位置”或“絕對位置”運行,如下圖所示
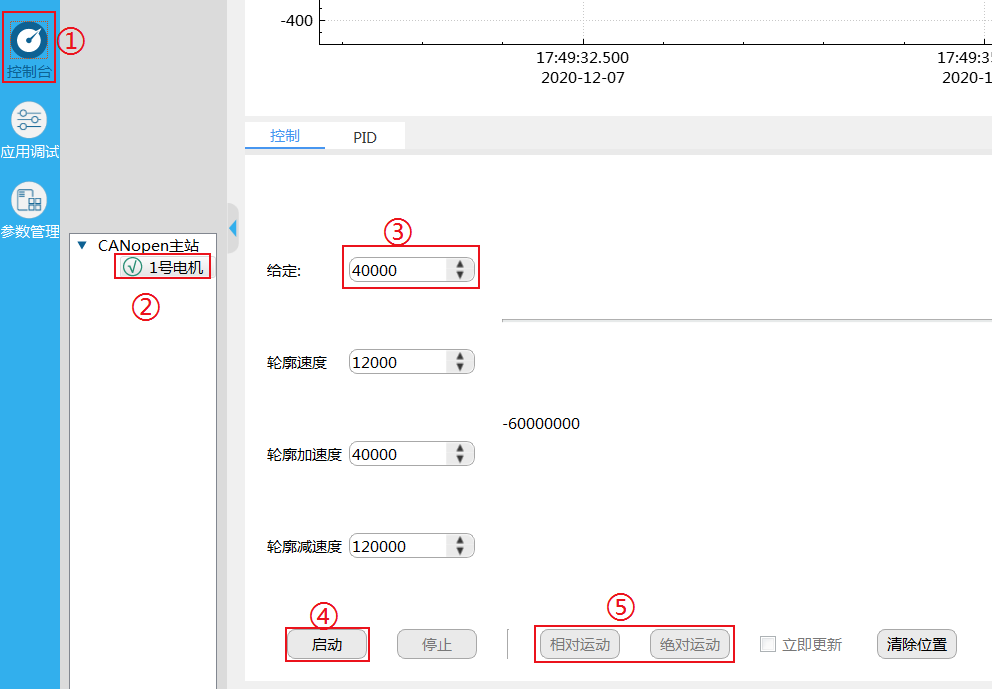
根據上面的流程操作,電機將按照給定位置運行。
控制流程報文如下圖所示。

輪廓速度模式運行
控制流程如下:
首先,
①點擊“運動配置”
②點擊“模式配置”
③選擇“CIA402模式”
④選擇“輪廓速度模式”
⑤點擊“設置到該模式”,如下圖所示

完成運動配置后,進行以下操作
①點擊左側“控制臺”
②選中已顯示的電機“1號電機”
③給定速度值
④點擊“啟動”,如下圖所示
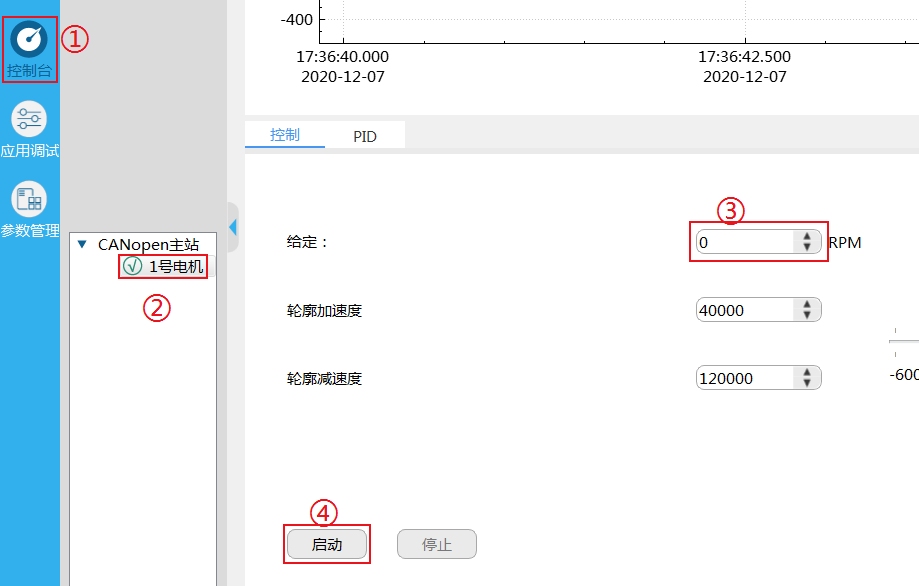
根據上面的流程操作,電機將按照給定速度運行。
控制流程報文如下圖所示。

四、補充說明
1.NIMStudio軟件左上角“幫助”里有軟件詳細介紹

2.NIMStudio軟件左上角“窗口”下拉選項“數據列表”,可查看實時報文

3.電機應用詳細介紹可參照《STMxx 系列一體化步進電機 CANopen 總線使用說明書》及《一體化步進電機 CANopen 通訊用戶手冊》
-
步進電機
+關注
關注
150文章
3036瀏覽量
146730 -
CANopen
+關注
關注
8文章
228瀏覽量
43377 -
STM
+關注
關注
1文章
555瀏覽量
42236
發布評論請先 登錄
相關推薦
什么是機電一體化
機電一體化系統
一體化伺服電機報警信息在哪個參數里面查看?
STM系列CAN通信一體化步進電機電機快速使用教程

STM-M系列(高性能)CANopen通信一體化步進電機快速使用教程







 工商網監
工商網監
評論