 伺服控制中常見的基本概念-2
伺服控制中常見的基本概念-2
傳統伺服電機應連接圖
==

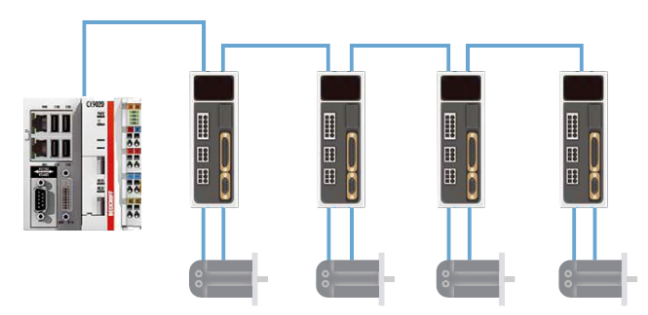
立邁勝一體化伺服電機連接示意圖

PMM系列一體化伺服電機主要特點:
1.模塊化高集成度設計,快速布置現場和安裝,省去驅動器和電機之間匹配過程,降低了現場總線的成本,減少了使用成本。
2.通過EtherCAT/CANOpen協議(DS402)與控制器相連,每個節點直接使用硬件實現運算,無需軟件參與,大幅縮短報文延遲時間。傳輸速率:2x100Mbps(全雙工)一個伺服軸的硬件延時只有1us。
3.控制精度達到±1rpm和±1pulse,1ms的實時響應周期,具有優異的控制性能及良好的定位精度。
更多關于一體化伺服電機查看
。
常見名詞解釋
工作區 operating area
工作區用轉速和轉矩組成的二維平面坐標表示(見下圖)。
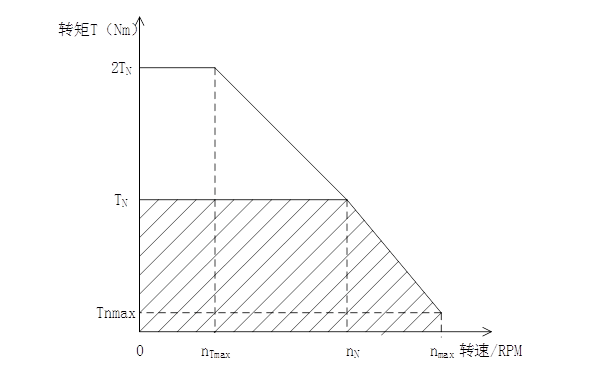
圖中:
2TN—2倍額定轉矩(峰值堵轉轉矩);TN—額定轉矩;Tnmax—最大轉速下的最大轉矩;nTmax—2倍額定轉矩下的最大轉速;nN—額定轉速;nmax—電機的最大轉速;
電機溫升不超過規定值,能長期工作的區域為連續工作區。上圖中陰影部分為連續工作區,超出連續工作區,允許電機短時過載運行的區域為斷續工作區。
直流母線電壓 DC bus voltage
交流伺服驅動器逆變器輸入端的直流電壓(即電源電壓48V或24V);
額定功率 rated power
在連續工作區內,電機所輸出的最大功率。
額定轉速 rated speed
在連續工作區內,電機額定功率點的轉速。
額定轉矩 rated torque
電機在額定功率和額定轉速下的輸出扭矩。
轉矩常數 torque constant
在規定條件下,電機通入單位線電流時所產生的平均電磁轉矩。
反電動勢常數 back EMF constant
在規定條件下,電機電樞繞組開路時,單位角速度在電樞繞組中所產生的線感應電動勢。對方波驅動電機反電動勢為峰值,對正弦波驅動電機反電動勢為有效值。
理想情況下,當采用國際單位時,轉矩常數Kt和反電動勢常數Ke有如下關系:
對方波驅動電機,Kt=Ke;
對正弦波驅動電機,Kt=√3Ke;
靜摩擦力矩 static friction torque
電機繞組開路時,使轉子在任意位置開始轉動需克服的阻力矩。
電機熱阻 thermal resistance of motor
從電機內的熱源(繞組、鐵心等)到冷卻介質之間對熱流的阻抗。
電感 inductance
電機兩相線間的電感。
直軸電感 inductance of d-axis(direct axis)
當定子旋轉磁場的軸線與轉子直軸重合時定子所表現的電感。
交軸電感 inductance of q-axis(quadrature axis)
當定子旋轉磁場的軸線與轉子交軸重合時定子所表現的電感。
電氣時間常數 electrical time constant
在階躍輸入電壓和規定條件下,堵轉電機使繞組電流達到其最終值的63.2%所需時間。
熱時間常數 thermal time constant
在恒定功耗和規定條件下,電機繞組溫升達到穩定值的63.2%所需時間。
最高允許轉速 maximum permitted speed
在保證電氣絕緣介電強度和機械強度條件下,電機最大設計轉速。
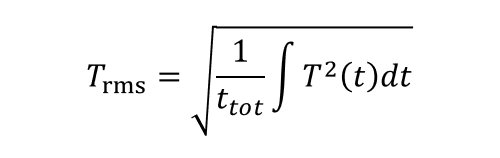
等效轉矩 r.m.s torque
非恒轉矩應用中,一個完整工作循環中轉矩的均方根值,其計算如下:
或近似計算:
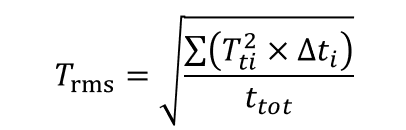
式中:Trms ----------等效轉矩;T(t)------------轉矩對時間t的函數Tti-------------Δti內的轉矩值Δti-------------轉矩Tti的持續時間Ttot------------一個完整工作循環的時間
講到這里,大家是否對這些專業術語有一個更深的了解呢?關注“立邁勝”公眾號,精彩不斷,收獲滿滿!
-
伺服電機
+關注
關注
85文章
2029瀏覽量
57701 -
一體化
+關注
關注
0文章
244瀏覽量
14404 -
pmm
+關注
關注
0文章
11瀏覽量
11100
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論