") DRIVE Labs“常學(xué)常新”系列「第二站」:基本路況感知
DRIVE Labs“常學(xué)常新”系列「第二站」:基本路況感知
DRIVE Labs 系列文章
第二站:基本路況感知
|
始 發(fā) 站 | 自 動(dòng) 駕 駛 基 礎(chǔ) 功 能 |
第 二 站 | 基 本 路 況 感 知 |
第 三 站 | 讀 懂 交 通 標(biāo) 志 與 信 號(hào) 燈 |
第 四 站 | 監(jiān) 控 車 外 的 風(fēng) 吹 草 動(dòng) |
第 五 站 | 提 高 道 路 狀 況 的 可 見 性 |
第 六 站 | 基 于 洞 察 的 智 能 規(guī) 劃 |
第 七 站 | 為 駕 乘 人 員 的 安 全 保 駕 護(hù) 航 |
終 點(diǎn) 站 | 尋 找 車 位 與 自 動(dòng) 泊 車 |
實(shí)際路況中充滿著復(fù)雜多變的現(xiàn)實(shí)挑戰(zhàn),自動(dòng)駕駛汽車能夠借助深度神經(jīng)網(wǎng)絡(luò) “感知”實(shí)際路況、“預(yù)判”潛在風(fēng)險(xiǎn)并“做出”恰當(dāng)選擇,以增強(qiáng)自動(dòng)駕駛汽車的安全性與可靠性。DRIVE Labs“常學(xué)常新”系列是 NVIDIA DRIVE 團(tuán)隊(duì)推出的、以一輛自動(dòng)駕駛汽車從出發(fā)到最終目的地為線索的系列文章,共分 8 期主題,將為大家詳細(xì)解析自動(dòng)駕駛汽車如何一路“過關(guān)斬將”,以及 NVIDIA 技術(shù)與產(chǎn)品在不同場(chǎng)景中提供的支持,以便讀者能更好地了解自動(dòng)駕駛。
本期是第二期“基本路況感知”,將帶您了解自動(dòng)駕駛汽車如何利用深度神經(jīng)網(wǎng)絡(luò)感知基本路況,實(shí)現(xiàn)安全駕駛!
上期文章為大家介紹了用于不同功能的深度神經(jīng)網(wǎng)絡(luò)(DNN),本期文章則將詳細(xì)介紹其中用于基本路況感知的 LaneNet DNN、WaitNet DNN 和路徑感知集成等具體的深度神經(jīng)網(wǎng)絡(luò)應(yīng)用。和 NVIDIA 一起上路看看自動(dòng)駕駛汽車道路實(shí)況測(cè)試吧!
城市道路的復(fù)雜性和實(shí)時(shí)性對(duì)自動(dòng)駕駛汽車的“隨機(jī)應(yīng)變”能力提出了更高的要求。在行駛期間,自動(dòng)駕駛汽車能夠利用數(shù)據(jù)感知實(shí)際路況、選擇正確的行駛路徑以及對(duì)現(xiàn)實(shí)情況做出即時(shí)反應(yīng)則至關(guān)重要。NVIDIA 構(gòu)建的感知軟件,憑借強(qiáng)大的計(jì)算性能,助力自動(dòng)駕駛汽車安全平穩(wěn)行駛!
基于 LaneNet DNN 開展車道線檢測(cè)
車道線標(biāo)記對(duì)于自動(dòng)駕駛汽車來說是重要的行車指南,能為車輛提供關(guān)鍵的駕駛環(huán)境信息,即自動(dòng)駕駛汽車所處位置以及目的地等。穩(wěn)健且高精的車道線監(jiān)測(cè),對(duì)于自動(dòng)駕駛汽車來說至關(guān)重要。以上視頻為大家介紹了 NVIDIA 如何訓(xùn)練深度神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)穩(wěn)健的車道線預(yù)測(cè)。
深度神經(jīng)網(wǎng)絡(luò)(DNN)處理現(xiàn)已成為一種重要的基于 AI 的車道檢測(cè)技術(shù)。NVIDIA 高精度 LaneNet 解決方案在卷積神經(jīng)網(wǎng)絡(luò)處理圖像時(shí),能夠以保留高清信息的方式對(duì)實(shí)況道路圖像數(shù)據(jù)進(jìn)行編碼,為豐富的空間信息創(chuàng)建足夠的冗余,以便保證在卷積神經(jīng)網(wǎng)絡(luò)固有的降采樣過程中信息的完整性。此外,借助高精度的 LaneNet DNN,自動(dòng)駕駛汽車還能在使用低清圖像處理方式的同時(shí),保留高清圖像當(dāng)中豐富的可用信息,以便車內(nèi)推斷進(jìn)行更有效的計(jì)算。
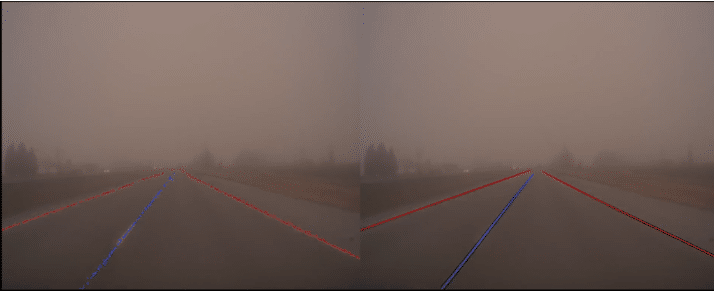
左:來自高精度 LaneNet 的逐幀像素級(jí)車道線檢測(cè)。右:像素級(jí)檢測(cè)在經(jīng)過后期處理之后顯示為車道線。在圖像邊界附近進(jìn)行額外的像素級(jí)車道線檢測(cè),就意味著在實(shí)際行車場(chǎng)景中,可以將車道線檢測(cè)范圍增加數(shù)十米。
高精度 LaneNet DNN的主要優(yōu)勢(shì)包括:
-
增加了車道線檢測(cè)的范圍
-
優(yōu)化了車道線邊緣檢測(cè)的準(zhǔn)確率/召回率
-
提升了車道線檢測(cè)的穩(wěn)健性
借助 LaneNet DNN 高精度車道線檢測(cè),自動(dòng)駕駛汽車能夠在道路上對(duì)車身進(jìn)行更好的定位,同時(shí)也能感知規(guī)劃出一條更安全的行駛路徑。
利用 WaitNet DNN 進(jìn)行交叉路口檢測(cè)
WaitNet 深度神經(jīng)網(wǎng)絡(luò)
自動(dòng)駕駛汽車在保持預(yù)測(cè)車道和路線行駛的過程中,會(huì)經(jīng)過形態(tài)各異且實(shí)況萬變的交叉路口。觀看以上視頻,了解 NVIDIA 如何利用基于 AI 的實(shí)時(shí)感知深度神經(jīng)網(wǎng)絡(luò)—WaitNet 深度神經(jīng)網(wǎng)絡(luò),實(shí)現(xiàn)自動(dòng)駕駛汽車對(duì)交叉路口的實(shí)時(shí)感知和分類。
WaitNet 表示檢測(cè)自動(dòng)駕駛汽車必須停車等待的情況,是一種卷積深度神經(jīng)網(wǎng)絡(luò),通過攝像頭圖像數(shù)據(jù)進(jìn)行訓(xùn)練,并對(duì)如交叉路口、施工區(qū)域和收費(fèi)站等需要等待的情形進(jìn)行推理和分類。
借助 WaitNet DNN 實(shí)現(xiàn)基于場(chǎng)景的交叉路口檢測(cè)(以黃色顯示)。交通信號(hào)燈檢測(cè)以紫色顯示。
WaitNet DNN的交叉路口檢測(cè)及分類過程與人類駕駛員檢測(cè)交叉路口的方式十分相似。WaitNet DNN 能夠綜合分析道路的多項(xiàng)特征,如停車標(biāo)識(shí),交通信號(hào)燈或者特殊地點(diǎn)或位置的車道線標(biāo)記等,進(jìn)行場(chǎng)景感知并檢測(cè)是否有交叉路口出現(xiàn),并對(duì)其進(jìn)行分類,可減少特征級(jí)檢測(cè)錯(cuò)誤的發(fā)生機(jī)率,提高自動(dòng)駕駛的安全性。此外,WaitNet DNN 還能夠進(jìn)行遠(yuǎn)距離檢測(cè)并對(duì)同一圖像幀中的多個(gè)交叉路口進(jìn)行分類。
利用深度神經(jīng)網(wǎng)絡(luò)感知交叉路口結(jié)構(gòu)
AI 如何幫助自動(dòng)駕駛汽車感知交叉路口結(jié)構(gòu)
交叉口是常見的道路特征,無論是社區(qū)中的四向停車,還是在布滿交通信號(hào)指示的多車道交匯口。以上視頻展示了 NVIDIA 如何借助 AI 來感知自動(dòng)駕駛汽車在日常駕駛中可能遇到的各種交叉口結(jié)構(gòu)。
事實(shí)上,NVIDIA 利用算法擴(kuò)展了 WaitNet DNN 預(yù)測(cè)交叉口結(jié)構(gòu)的能力,開發(fā)了基于 DNN 的交叉口結(jié)構(gòu)感知功能作為 WaitNet DNN 的添加。NVIDIA 將這些交叉口結(jié)構(gòu)視為所謂“關(guān)節(jié)”的點(diǎn)集合。正如人體通過關(guān)節(jié)的連接來做出動(dòng)作一樣,NVIDIA 通過將交叉口結(jié)構(gòu)的關(guān)節(jié)連接到車輛需遵循的路徑中,來實(shí)現(xiàn)自動(dòng)駕駛車輛的正確行駛。
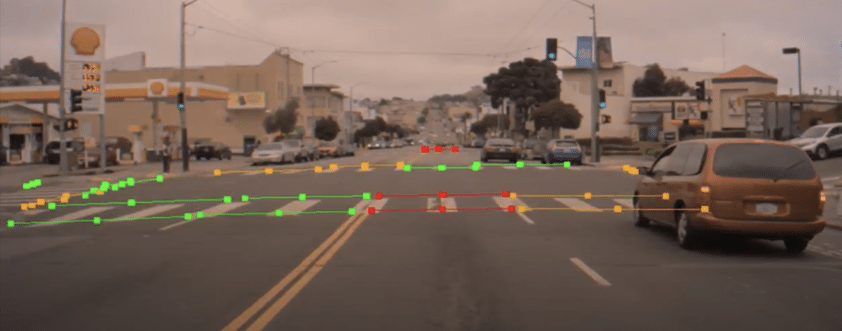
上圖展示了基于 DNN 進(jìn)行的交叉口結(jié)構(gòu)預(yù)測(cè)。如圖所示,我們可以檢測(cè)交叉口結(jié)構(gòu)特征并將其分為不同類別。例如,測(cè)試車輛和現(xiàn)場(chǎng)其他車輛的交叉口的入口和出口點(diǎn),以及人行橫道的入口和出口。
該 DNN 不會(huì)分割圖像輪廓,而是能夠區(qū)分不同車道的交叉口入口和出口點(diǎn),并且其針對(duì)遮擋和部分遮擋的交叉口結(jié)構(gòu)預(yù)測(cè)更具可靠性,還能夠預(yù)測(cè)繪制的和推斷的交叉口結(jié)構(gòu)線。
此外,該實(shí)時(shí)感知功能具有可擴(kuò)展性,無需人工標(biāo)記便可處理各種類型的交叉口,還能夠與擁有高質(zhì)量數(shù)據(jù)的地圖信息相結(jié)合,創(chuàng)建用于處理復(fù)雜路口的多樣性和冗余,可助力自動(dòng)駕駛汽車應(yīng)對(duì)復(fù)雜的交叉口結(jié)構(gòu)所帶來的挑戰(zhàn)。
路徑感知集成
路徑感知集成
自動(dòng)駕駛汽車在實(shí)況中運(yùn)行會(huì)遇到多種多樣的情況,如若汽車僅在一種路徑感知信號(hào)下行駛,則無法保證置信度的實(shí)時(shí)正確性,且如果唯一的路徑感知輸入失敗,自動(dòng)駕駛功能也許會(huì)失靈;就算功能不失靈,也可能導(dǎo)致操作的舒適度和平穩(wěn)度有所降低。
為建立實(shí)時(shí)的置信度,NVIDIA 在路徑感知軟件中引入了多樣性和冗余。但由于不同的 DNN 在訓(xùn)練數(shù)據(jù)、編碼、模型架構(gòu)和訓(xùn)練輸出方面完全不同,各種深度神經(jīng)網(wǎng)絡(luò)(DNN)產(chǎn)生的路徑感知信號(hào)在很大程度上是相互獨(dú)立的。為實(shí)現(xiàn)感知功能的“協(xié)同并進(jìn)與互相配合”,NVIDIA 利用集成技術(shù),即機(jī)器學(xué)習(xí)的方式將基礎(chǔ)模型進(jìn)行組合以構(gòu)建最優(yōu)的預(yù)測(cè)模型(如以上視頻所示)。在 NVIDIA 路徑感知集成中,基礎(chǔ)模型包含三個(gè)不同的深度神經(jīng)網(wǎng)絡(luò):
-
LaneNet DNN可以預(yù)測(cè)車道線路
-
PathNet DNN能在無論是否存在車道線路的情況下,都能夠預(yù)測(cè)和定義可行駛路徑的范圍
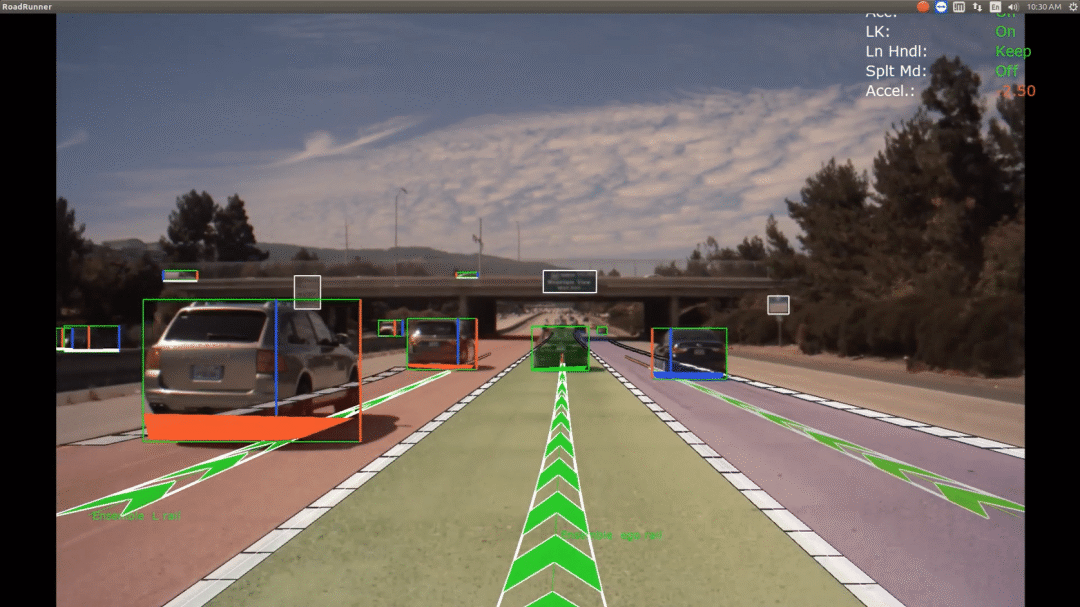
高置信度路徑感知集成示例(包括左車道,汽車所在車道以及右車道的中心路徑)。高置信度的結(jié)果在可視化中呈現(xiàn)出粗的綠色中心路徑線條。實(shí)心的白色線代表車道預(yù)測(cè)線,也是由集成計(jì)算得出。
以上深度神經(jīng)網(wǎng)絡(luò)的數(shù)據(jù)輸出結(jié)合高清地圖輸出,共同構(gòu)成了感知集成輸出。通過對(duì)不同的路徑感知信號(hào)的聯(lián)合分析,NVIDIA 建立并測(cè)量了汽車在實(shí)況駕駛中的路徑感知可靠性,為實(shí)現(xiàn)可靠駕駛提供了可視化參考和全面的分析結(jié)果。
以上就是本期全部?jī)?nèi)容。希望大家喜歡本次的自動(dòng)駕駛之旅。點(diǎn)擊“閱讀原文”,觀看更多 NVIDIA DRIVE Labs & Dispatch 視頻,了解 NVIDIA DRIVE 軟件如何助力自動(dòng)駕駛。
DRIVE Labs“常學(xué)常新”系列
往期精彩回看
「入門篇」:自動(dòng)駕駛基礎(chǔ)功能
掃描下方海報(bào)二維碼,即可免費(fèi)注冊(cè) GTC 23,切莫錯(cuò)過這場(chǎng) AI 和元宇宙時(shí)代的技術(shù)大會(huì)!
原文標(biāo)題:DRIVE Labs“常學(xué)常新”系列「第二站」:基本路況感知
文章出處:【微信公眾號(hào):NVIDIA英偉達(dá)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
英偉達(dá)
+關(guān)注
關(guān)注
22文章
3749瀏覽量
90845
原文標(biāo)題:DRIVE Labs“常學(xué)常新”系列「第二站」:基本路況感知
文章出處:【微信號(hào):NVIDIA_China,微信公眾號(hào):NVIDIA英偉達(dá)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一桿有AI的路燈:感知環(huán)境監(jiān)測(cè)路況還能“對(duì)話”無人駕駛AI燈桿屏

AMD推出第二代Versal Premium系列
天合光能至尊堂中國(guó)行第二季·青島站圓滿落幕

新手學(xué)操作系統(tǒng) 第二周
第二代AMD Versal Prime系列自適應(yīng)SoC的亮點(diǎn)
【xG24 Matter開發(fā)套件試用體驗(yàn)】深入了解Silicon Labs xG24 Matter開發(fā)套件
Silicon Labs2024年第二季度營(yíng)收1.45億美元
展會(huì)邀請(qǐng)丨4月25日,IME2024第二站·南京站聚勢(shì)來襲!

Matter、Sidewalk、Wi-SUN、Wi-Fi 6–Silicon Labs的全新產(chǎn)品系列,適用于家庭、庭院、城市中的物聯(lián)網(wǎng)
TCL蟬聯(lián)全球電視品牌銷量第二
臺(tái)積電或在日本建第二座工廠!
明德?lián)PPCIE開發(fā)板系列XILINX-K7試用體驗(yàn)-第二篇





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論