 三相無刷電機的結構、工作原理及驅動方法
三相無刷電機的結構、工作原理及驅動方法
三相全波無刷電機的結構
從本文開始,我們將介紹三相無刷電機的結構、三相無刷電機的工作原理及三相無刷電機的驅動方法等內容。首先是三相無刷電機的結構。
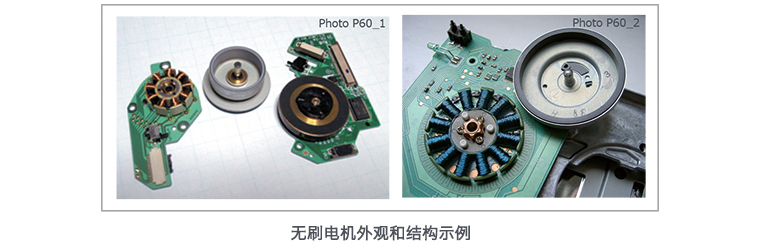
三相全波無刷電機的外觀和結構
左側是用來旋轉光盤播放設備中的光盤的主軸電機示例。共有三相×3共9個線圈。右側是FDD設備的主軸電機示例,共有12個線圈(三相×4)。線圈被固定在電路板上,并纏繞在鐵芯上。
在線圈右側的盤狀部件是永磁體轉子。外圍是永磁體,轉子的軸插入線圈的中心部位并覆蓋住線圈部分,永磁體圍繞在線圈的外圍。
三相全波無刷電機的內部結構圖和線圈連接等效電路
接下來是內部結構簡圖和線圈連接等效電路示意圖。
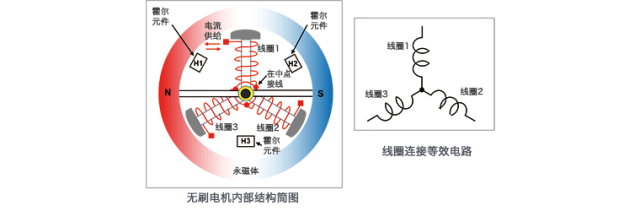
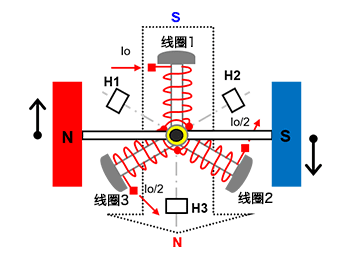
該內部結構簡圖是結構很簡單的2極(2個磁體)3槽(3個線圈)電機示例。它類似于極數和槽數相同的有刷電機結構,但線圈側是固定的,磁體可以旋轉。當然,沒有電刷。
在這種情況下,線圈采用Y形接法,使用半導體元件為線圈供給電流,根據旋轉的磁體位置來控制電流的流入和流出。在該示例中,使用霍爾元件來檢測磁體的位置。霍爾元件配置在線圈和線圈之間,根據磁場強度檢測產生的電壓并用作位置信息。在前面給出的FDD主軸電機的圖像中,也可以看到在線圈和線圈之間有用來檢測位置的霍爾元件(線圈的上方)。
霍爾元件是眾所周知的磁傳感器。可將磁場的大小轉換為電壓的大小,并以正負來表示磁場的方向。下面是顯示霍爾效應的示意圖。
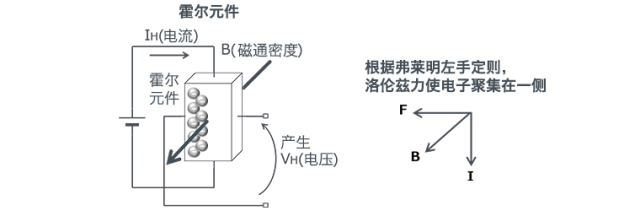
霍爾元件利用了“當電流IH流過半導體并且磁通B與電流成直角穿過時,會在垂直于電流和磁場的方向上產生電壓VH”的這種現象,美國物理學家Edwin Herbert Hall(埃德溫·赫伯特·霍爾)發現了這種現象并將其稱為“霍爾效應”。產生的電壓VH由下列公式表示。
VH = (KH / d)?IH?B??※KH:霍爾系數,d:磁通穿透面的厚度
如公式所示,電流越大,電壓越高。常利用這個特性來檢測轉子(磁體)的位置。
三相全波無刷電機的旋轉原理
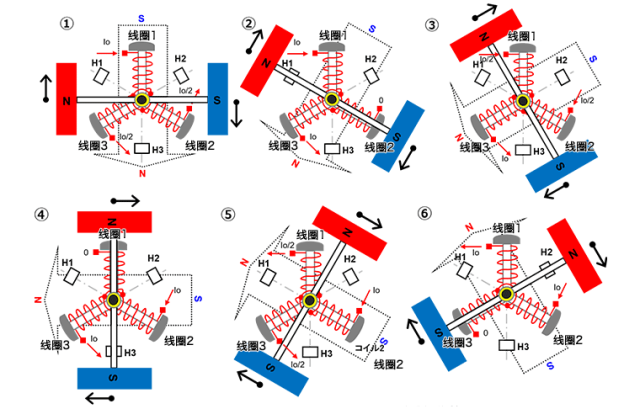
下面將按照步驟①~⑥來說明無刷電機的旋轉原理。為了易于理解,這里將永磁體從圓形簡化成了矩形。
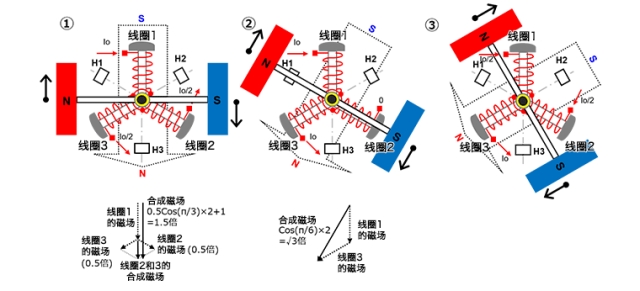
①在三相線圈中,設線圈1固定在時鐘的12點鐘方向上,線圈2固定在時鐘的4點鐘方向上,線圈3固定在時鐘的8點鐘方向上。設2極永磁體的N極在左側,S極在右側,并且可以旋轉。
使電流Io流入線圈1,以在線圈外側產生S極磁場。使Io/2電流從線圈2和線圈3流出,以在線圈外側產生N極磁場。
在對線圈2和線圈3的磁場進行矢量合成時,向下產生N極磁場,該磁場是電流Io通過一個線圈時所產生磁場的0.5倍大小,與線圈1的磁場相加變為1.5倍。這會產生一個相對于永磁體成90°角的合成磁場,因此可以產生最大扭矩,永磁體順時針旋轉。
當根據旋轉位置減小線圈2的電流并增加線圈3的電流時,合成磁場也順時針旋轉,永磁體也繼續旋轉。
②在旋轉了30°的狀態下,電流Io流入線圈1,使線圈2中的電流為零,使電流Io從線圈3流出。
線圈1的外側變為S極,線圈3的外側變為N極。當矢量合成時,產生的磁場是電流Io通過一個線圈時所產生磁場的√3(≈1.72)倍。這也會產生相對于永磁體的磁場成90°角的合成磁場,并順時針旋轉。
當根據旋轉位置減小線圈1的流入電流Io、使線圈2的流入電流從零開始增加、并使線圈3的流出電流增加到Io時,合成磁場也順時針旋轉,永磁體也繼續旋轉。
※假設各相電流均為正弦波形,則此處的電流值為Io × sin(π?3)=Io × √3?2 通過磁場的矢量合成,得到總磁場大小為一個線圈所產生磁場的(√3?2)2×2=1.5 倍。當各相電流均為正弦波時,無論永磁體的位置在哪,矢量合成磁場的大小均為一個線圈所產生磁場的1.5倍,并且磁場相對于永磁體的磁場成90°角。
③在繼續旋轉了30°的狀態下,電流Io/2流入線圈1,電流Io/2流入線圈2,電流Io從線圈3流出。
線圈1的外側變為S極,線圈2的外側也變為S極,線圈3的外側變為N極。當矢量合成時,產生的磁場是電流Io流過一個線圈時所產生磁場的1.5倍(與①相同)。這里也會產生相對于永磁體的磁場成90°角的合成磁場,并順時針旋轉。

④~⑥以①~③相同的方式旋轉。
這樣,如果不斷根據永磁體的位置依次切換流入線圈的電流,則永磁體將沿固定方向旋轉。同樣,如果使電流反向流動并使合成磁場方向相反,則會逆時針旋轉。
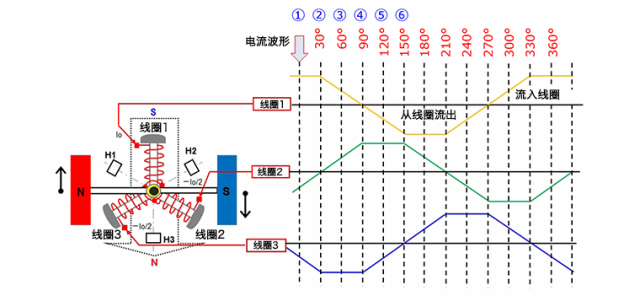
下圖連續顯示了上述①~⑥每個步驟的每個線圈的電流。通過以上介紹,應該可以理解電流變化與旋轉之間的關系了。
關鍵要點:
?三相全波無刷電機通過三個線圈的電流流入和流出使磁場發生變化,從而使三相全波無刷電機的轉子旋轉。
三相全波無刷電機的位置檢測
在上一篇“三相全波無刷電機的旋轉原理”中,介紹了三相全波無刷電機通過三個線圈中的驅動電流切換實現旋轉的原理。接下來將介紹三相全波無刷電機的驅動方法,但在此之前會先介紹三相全波無刷電機的位置檢測方法,因為在實際的三相全波無刷電機驅動中,需要檢測旋轉的永磁體的位置。
位置檢測的方法主要有兩種。一種是使用傳感器的方法,這種方法需要使用霍爾元件的電壓。雖然在上一篇文章中用來說明旋轉原理的圖中沒有直接解釋,但是標出了H1、H2和H3霍爾元件(傳感器)。另一種是檢測各線圈的感應電壓的方法,由于這種方法不使用傳感器而被稱為“無傳感器方法”。
使用霍爾元件的位置檢測(有傳感器)
使用霍爾元件(傳感器)檢測旋轉的永磁體位置時,將霍爾元件的安裝位置設置在線圈和線圈之間的中點,即1/2角度對應的點(參見右圖)
假設線圈3與線圈1之間的霍爾元件為H1,線圈1與線圈2之間的霍爾元件為H2,線圈2與線圈3之間的霍爾元件為H3,則順時針方向旋轉的電流波形與霍爾元件的信號波形對比如下(中段波形)。
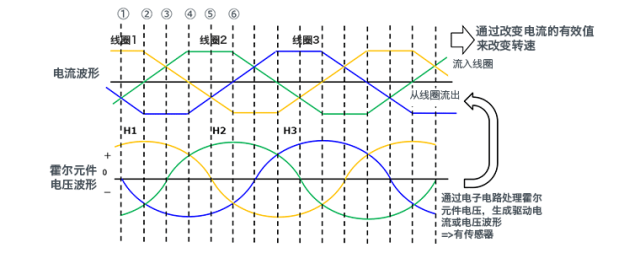
在這個示例中,當對霍爾元件施加N極磁場時產生正(+)電壓,當施加S極磁場時產生負
(-)電壓,并且磁場的強度根據永磁體的旋轉位置以正弦波變化(波形圖下半部分“霍爾元
件電壓波形”)。各相的輸出電流波形為梯形波(波形圖上半部分“電流波形”)。波形圖時間
軸上的①~⑥的點與上一篇中用來說明“旋轉原理”的圖中的①~⑥相對應。該圖也會在下一節“使用感應電壓進行位置檢測(無傳感器)”中使用。
驅動時,由根據轉子位置而變化的霍爾元件輸出信號波形合成輸出電流波形。合成是由H1電壓波形減去H2電壓波形,H2電壓波形減去H3電壓波形,H3電壓波形減去H1電壓波形。通過這些運算,可以獲得相位比H1、H2和H3提前30°的正弦波形(M1、M2、M3)。只要基于這些信號生成輸出電流,即可創建用于驅動具有所需相位的電機的電流波形。
要合成用于反轉的輸出電流信號時,需要從H2中減去H1,從H3中減去H2,從H1中減去H3。也就是說,基于M1=H2-H1、M2=H3-H2、M3=H1-H3,根據M1、M2和M3的組合波形的相位提供輸出電流,即可實現反轉。
使用感應電壓進行位置檢測(無傳感器)
這是不需要傳感器(霍爾元件)的方法,使用的是線圈中產生的感應電壓。在三相全波無刷電機中,永磁體相對于線圈旋轉,N極和S極交替變化,所以線圈的磁通密度發生變化,線圈自身發電并產生感應電壓。當磁極N在線圈端時,進入線圈方向的磁通密度最高;當磁極S在線圈端時,從線圈出來的方向的磁通密度最高。然而,當永磁體的磁化波形為正弦波狀時,磁通密度的變化在N極和S極之間的中點處最大。
上圖與上一篇“旋轉原理”中使用的圖片相同,三相全波無刷電機①~⑥的狀態對應于下面波形圖中的時間軸①~⑥。
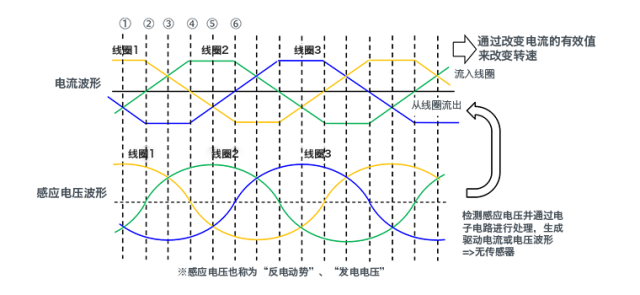
下面對三相全波無刷電機①~⑥的狀態與感應電壓波形之間的關系進行說明。
①:線圈1位于S極和N極之間的中點,由于S極產生的磁通從線圈外側出來的工作變為N極產生的磁通進入線圈的工作,因此磁通密度的變化最大。所以線圈1的感應電壓相對于線圈中點是正電壓,且最大。
②:由于磁通密度的變化比之前略小,因此線圈1的感應電壓降低。
③:由于通往線圈1的磁通密度的變化進一步變小,因此感應電壓也進一步降低。
④:由于N極在線圈端,磁通密度的變化變為零,所以線圈1的感應電壓變為零。
⑤:由于N極逐漸遠離線圈1,進入線圈的磁通量逐漸減少,因此感應電壓變為負值,磁通量變化小,故感應電壓略有下降。
⑥:由于通往線圈1的磁通密度的變化進一步變小,因此感應電壓也進一步降低。
同樣,線圈2和線圈3在從S極切換到N極的中點產生最高的正感應電壓,在從N極切換到S極的中點產生最高的負感應電壓,當N極和S極位于線圈端時,感應電壓變為零。
另外,如波形圖所示,各線圈的感應電壓波形與其驅動電流波形的相位相同。
通過檢測感應電壓的零點并合成輸出電流波形,可以將感應電壓用作轉子的位置檢測信號,使電機旋轉,因此無需使用位置檢測用的霍爾元件即可進行控制。
從下一篇開始,將會介紹實際的驅動方法。
關鍵要點:
?三相全波無刷電機的位置檢測方法有兩種:三相全波無刷電機使用霍爾元件的方法和三相全波無刷電機不使用霍爾元件而使用電機線圈的感應電壓的方法。
三相全波無刷電機的驅動:有傳感器、120度激勵線性電流驅動
從本文開始,將介紹三相全波無刷電機的驅動。三相全波無刷電機通常通過控制和驅動電路給電機激勵來實現驅動。三相全波無刷電機驅動的激勵方式有120度激勵驅動和正弦波激勵驅動兩種。三相全波無刷電機驅動的每種方式都有其優缺點。總體上來看,正弦波驅動在控制精度、效率和噪聲方面具有優勢,但缺點是會增加系統的復雜性和成本。而120度激勵驅動雖然在控制精度、效率和噪聲方面不及正弦波驅動,但系統更簡單,在成本方面也更具優勢。后續將會詳細介紹三相全波無刷電機驅動的每種激勵方式,首先來看有傳感器的120度激勵線性電流驅動。
三相全波無刷電機的驅動:有傳感器、120度激勵線性電流驅動
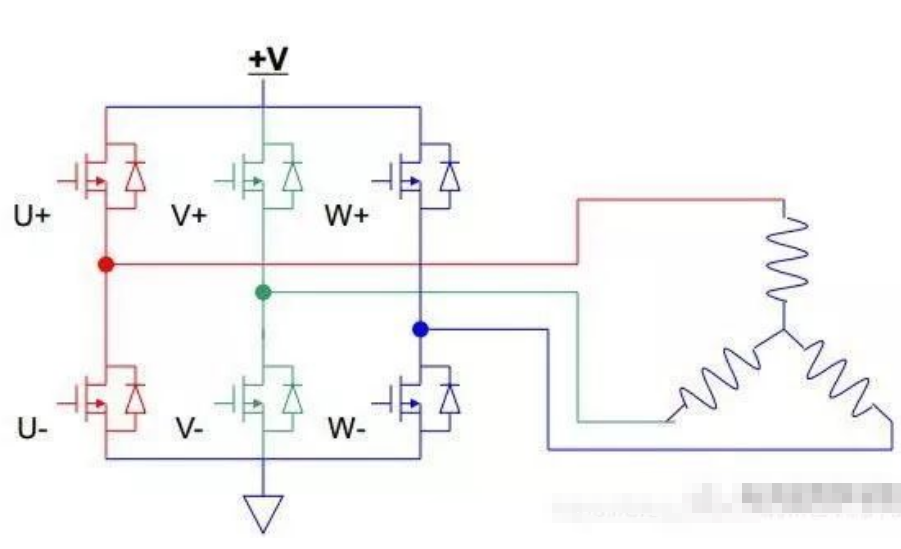
120度激勵驅動通過由高邊和低邊開關組成的驅動器所具備的三相控制和驅動電路來實現驅動。下面根據120度激勵驅動的驅動電路示例和各輸入輸出波形圖對這種驅動方式進行說明。
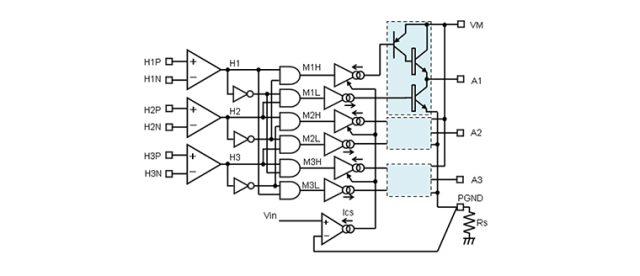
先看各線圈的電流波形。各線圈在各相位差120度的狀態下,在120度期間導通并使電流流入線圈,在60度期間關斷,并在120度期間導通使電流流出,再在60度期間關斷,并重復這樣的周期循環(垂直虛線每格增量為30度)。這個激勵期間為120度,故被稱為“120度激勵”。
驅動電路的H1P/H1N~H3P/H3N表示霍爾元件電壓的輸入,以差分方式接收來自霍爾元件的信號(參見波形圖“霍爾元件電壓波形”)。
霍爾元件電壓被差分放大器轉換為矩形(參見矩形波形H1~H3)。
通過下一級的邏輯運算,被轉換為矩形的波形成為各高邊開關(晶體管)和低邊開關的驅動信號,并通過電流驅動放大器驅動高邊和低邊開關(參見合成波形M1H/M1L~M3H/M3L、線圈1~3電流波形)。
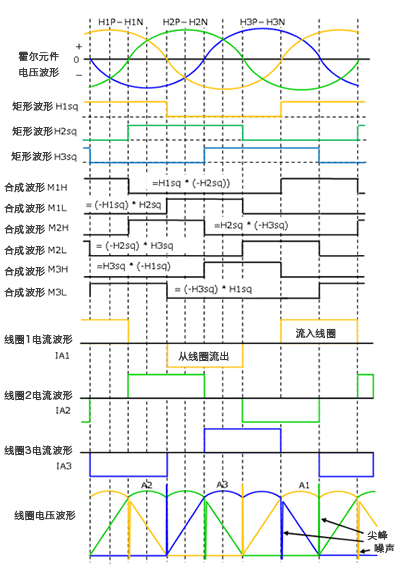
簡單地講,在線圈電流關斷的60度期間不會產生線圈電壓,但實際上電機在旋轉,線圈會產生感應電壓,因此關斷期間會產生上升和下降斜坡電壓,在線圈電流會產生急劇變化的點,產生箭頭所示的尖峰噪聲樣電壓。
在下一篇文章中將會介紹三相全波無刷電機的驅動的另一個激勵方式:正弦波激勵驅動。
關鍵要點:
?在三相全波無刷電機的驅動的120度激勵驅動中,是通過各相位差120度、并反復進行“120度導通(H)、60度關斷、120度導通(L)、60度關斷”的循環來實現在三相全波無刷電機驅動的。
三相全波無刷電機的驅動:有傳感器、正弦波激勵PWM驅動
繼上一篇“三相全波無刷電機的120度激勵線性電流驅動”之后,本文將介紹“三相全波無刷電機的正弦波激勵PWM驅動”。在上一篇文章中也提到過,三相全波無刷電機的激勵方式有120度激勵驅動和正弦波激勵驅動兩種。相比120度激勵驅動,三相全波無刷電機的正弦波激勵驅動在控制精度、效率、噪聲等方面更具優勢,但在系統的復雜性和成本方面,三相全波無刷電機的矩形波驅動更勝一籌。
三相全波無刷電機的驅動:有傳感器、正弦波激勵PWM驅動電路示例
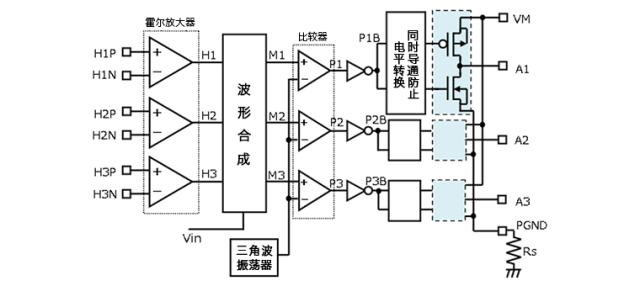
正弦波激勵驅動通過由高邊和低邊開關組成的驅動器所具備的三相控制和驅動電路來實現驅動。以下是帶有傳感器的正弦波激勵PWM驅動的電路框圖和各輸入輸出波形圖示例。其基本工作是將來自三個霍爾傳感器的信號輸入至霍爾放大器的輸入端,經過波形合成的信號通過比較器和三角波轉換為PWM信號,由輸出段MOSFET來驅動電機的線圈。A1、A2、A3的PWM信號的等效電壓為120度相位差的正弦激勵波形。120度激勵是120度導通60度關斷的矩形波激勵方法,但正弦波驅動則是180度激勵,由于是通過正弦波對零到最大值實施激勵,因此工作更平穩,噪聲更低。另外,PWM還有助于提高效率。
三相全波無刷電機的驅動:有傳感器、正弦波激勵PWM驅動波形示例
下面使用各波形示例進行詳細說明,先來了解正弦波PWM轉換。
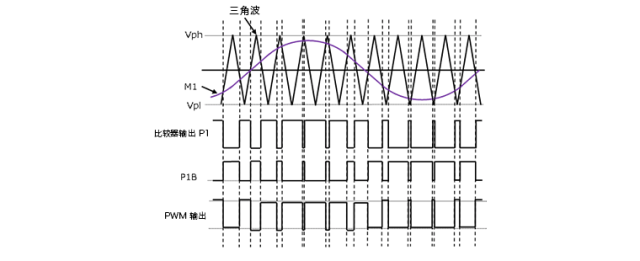
以前面框圖中的H1P/H1N輸入通道為例。霍爾放大器的輸出H1通過波形合成電路變為圖中紫色的正弦波M1。來自M1和三角波振蕩器的三角波被輸入比較器,作為比較結果,輸出具有脈沖寬度的矩形波P1(比較器輸出)。P1是通過電平轉換和同時導通防止電路來控制輸出段MOSFET的柵極,從而驅動電機線圈的PWM輸出。這種使用比較器和三角波的PWM轉換是很常見的方式,并且是很多電路中使用的方法,比如開關穩壓器的PWM生成等。接下來,請看各輸入輸出波形。
霍爾元件電壓的輸入H1P/H1N~H3P/H3N,是以差分方式接收來自霍爾元件的信號,并輸出H1~H3相位差120度的正弦波(參見波形圖“霍爾元件電壓波形”)。霍爾元件電壓通過波形合成電路成為M1~M3。此時,以比原始相位超前30度以上的相位生成各波形(參見“合成波形”)。稱為“超前角”的概念將會另行詳細介紹。如前所述,M1~M3通過比較器與三角波進行比較并被轉換為PWM信號(參見“比較器波形P1~P3”)。電機線圈的電壓波形是PWM信號,但波形圖中顯示的是等效電壓波形。可以看出等效電壓波形是正弦波驅動。
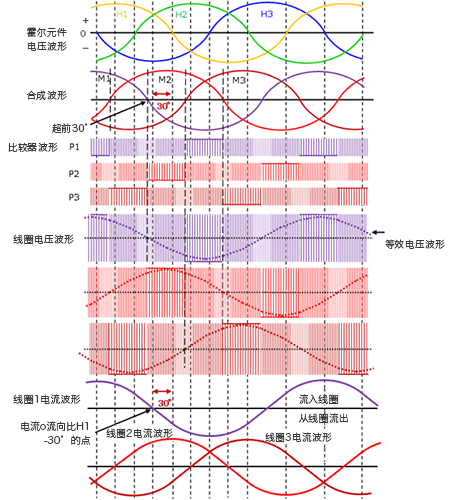
當然,線圈電流是正弦波。通過波形合成電路使相角超前,從而使線圈電流波形的相角總是比霍爾元件電壓(H1~H3)超前30度。這一系列的控制稱為“超前角控制”。120度激勵時,在線圈電壓波形中看到有線圈電流的ON/OFF引起的尖峰噪聲,但在正弦波激勵驅動時,由于是180度激勵,沒有ON/OFF,因此不會發生尖峰噪聲。下一篇計劃介紹超前角控制的相關內容。
關鍵要點:
?三相全波無刷電機的正弦波激勵PWM驅動是各相位差為120度的正弦波驅動。?三相全波無刷電機的正弦波激勵PWM驅動由于不會像三相全波無刷電機的120度激勵驅動那樣產生尖峰噪聲而在噪聲方面更具優勢。?三相全波無刷電機的正弦波驅動通過PWM驅動實現高效率。
總結:三相全波無刷電機的特征與用途
三相全波無刷電機的特征
下表從優點和缺點的角度總結了三相全波無刷電機的特征。加粗的部分是尤為重要的要點。
| 優點 | 缺點 |
|
?電氣噪聲和機械噪聲小 ?可靠性高,壽命長 ?容易提高速度 ?效率高 ?易于小型化和設計成各種形狀 ?旋轉速度與施加電壓成正比 ?旋轉速度與負載成正比下降 ?啟動時和低速時的轉矩大 ?轉矩與電流成正比 ?主要特性呈線性變化,易于控制 |
?轉子是永磁體,因此轉動慣量無法減小 ?整流功能需要復雜的電子電路和傳感器,成本更高 ?驅動電路和電機間需要較多布線 ?容易發生轉矩波動(線圈有鐵芯時) |
三相全波無刷電機的用途示例
下表中總結了三相全波無刷電機在典型設備中的應用示例。除此之外還有其他多種用途,這里只是部分示例
| 設備 | 應用示例 |
| HDD | ?主軸:磁盤的旋轉→三相無傳感器 |
|
電腦/游戲機用DVD/藍光驅動 藍光刻錄機/播放器 |
?主軸:磁盤的旋轉→三相無傳感器 |
|
激光打印機(LBP) PPC |
?進紙→三相有傳感器 ?多棱鏡:激光掃描用多面鏡旋轉→三相有傳感器、三相無傳感器 |
| 直流風扇 | →雙相半波無刷、單相全波無刷、三相無傳感器 |
| 無人機 |
?螺旋槳→三相無傳感器 ?云臺控制:相機方向固定→三相無傳感器 |
| 工具 | ?驅動器、?電鉆、?電鋸等:旋轉→三相有傳感器 |
| 家電 |
?空調:壓縮機、風扇(室內機/室外機)、?空氣凈化器 ?吸塵器、冰箱(壓縮機、風扇)等 |
| 汽車電氣/電子設備 |
?空調:風扇、?電池冷卻風扇 ?座椅:風扇、氣泵等 |
關鍵要點:
?三相全波無刷電機最大的優點是沒有電刷,因此電氣噪聲和機械噪聲很小,可靠性高,壽命長。
?三相全波無刷電機的缺點是整流功能需要復雜的電子電路和傳感器,成本更高。
審核編輯:湯梓紅
-
線圈
+關注
關注
14文章
1748瀏覽量
44192 -
電機
+關注
關注
141文章
8772瀏覽量
143763 -
工作原理
+關注
關注
4文章
273瀏覽量
37550 -
無刷電機
+關注
關注
57文章
800瀏覽量
45473 -
三相無刷電機
+關注
關注
0文章
27瀏覽量
6284
原文標題:關鍵要點:
文章出處:【微信號:電子技術控,微信公眾號:電子技術控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
三相全波無刷電機的正弦波驅動中施加更大電壓的方法





 工商網監
工商網監
評論