 可以實現“坦克掉頭”的四輪獨立驅動車型,為什么還未廣泛量產?
可以實現“坦克掉頭”的四輪獨立驅動車型,為什么還未廣泛量產?
電子發燒友網報道(文/梁浩斌)進入電動汽車時代,驅動能源以及動力形式的改變,讓以往汽油車難以實現的車輛行駛功能成為可能。今年年初比亞迪發布旗下新車型仰望U8就采用了四電機平臺獨立驅動架構,每個車輪都由單個電機控制,可以實現更精準的行駛動態控制,以及原地360°掉頭等功能。
實際上目前也有不少車企都展示了四輪獨立驅動的技術,包括搭載四電機的奔馳EQG、斯巴魯STi E-RA概念車等。不過目前已經上市的量產車型中似乎還沒有四輪獨立驅動的乘用車出現,所以四輪獨立驅動是否存在技術門檻導致難以量產?
電動汽車驅動形式
在傳統燃油乘用車上,考慮到成本、動力損耗和座艙空間布局等問題,普遍會采用發動機前置前驅的形式。相比于前置后驅,發前置前驅的發動機經差速器后用半軸直接驅動前輪,減少了貫穿車身的傳動軸,令座艙內擁有更大空間的同時,也降低了動力損耗。對于普通家用車而言,動力不會太強,更需要的是行駛過程中的穩定性,而前置前驅由于重量集中在車身前端(驅動輪),所以直線行駛穩定性會更好。
當然,燃油車發動機重量大,重量集中在車身前端,如果采用前置前驅的形式,在車輛起步時由于慣性,車輛重心會往后轉移,導致前輪更容易出現打滑現象。所以像一些小型的商用車為了載貨時保持輪胎抓地力,往往都會選擇前置后驅的形式。
前置后驅也是很多高性能車型所選擇的方案,由于動力較大且對操控要求更高,后驅在加速過程中的抓地力會更強。為了更高的穩定性,也有很多車型會采用前置四驅的形式。總體而言,燃油車時代根據車型需求不同,還有較為小眾的后置后驅、后置四驅、中置后驅、中置四驅等形式,但這些形式都是在車身作出多方面的取舍,比如空間等,去換取其他駕駛方面的性能,因此都難以成為主流車型的驅動形式。
但電動汽車不同,由于電機的體積相對燃油發動機大大縮小,高度集成之下令電機的布置更加靈活。比如以往燃油車中只在保時捷911等雙座跑車上才能看到的后置后驅,目前已經在多款主流電動汽車上被應用,像特斯拉Model 3、小鵬P7等。在電動汽車上,電機可以直接被布置在后軸上直接驅動后輪,顯著提升操控體驗,并且不會對車內空間造成影響。
對于高性能的電動汽車,目前主流的驅動形式是前后雙電機四輪驅動,前后電機分別驅動前后輪軸。有一些高端的車型比如悍馬EV、Model S Plaid版、Lucid Air Sapphire等則采用了三電機驅動,兩臺電機分別驅動兩個后輪,一臺電機驅動前軸。
后輪由兩個電機分別驅動,可以實現一些以往單軸驅動不能實現的功能。Lucid在官網上提到,Lucid Air Sapphire搭載了進階扭矩分配控制系統,這套系統能為后輪提供反方向的扭矩,以此提升轉彎或直線加速的穩定度,且車輛在急轉彎時,該系統還能為外側車輪提供動力的同時,讓內側車輪得到動能回收產生剎車效果,進而改善轉向時的平衡。
四輪獨立驅動
四輪獨立驅動意味著每個車輪都有單獨的電機控制,也就是四電機驅動,四個車輪的驅動完全依靠電子控制系統來控制四個電機的轉速和轉向,無需機械差速器。前面提到比亞迪仰望U8實現的原地掉頭,就是利用坦克左右履帶反向轉動實現轉向的原理,通過控制車輛左右車輪的反向轉動,令車輛在最小的空間范圍內實現多個角度的轉向。
而在三電機的基礎下,四電機四輪獨立驅動形式在車輛轉向時除了后輪能實時調整扭矩分配之外,前輪也能同步進行調整,進一步提升車輛轉彎時的行駛穩定。
在車輛過彎時,由于車輛寬度會造成左右兩側的線速度不同,為了行駛穩定,左右兩側車輪在過彎時必然存在轉速差,外側輪轉速較快,內側輪轉速較慢。傳統的單軸驅動汽車,在車輛過彎時可以通過差速器,來吸收左右輪的轉速差,使車輛更穩定可控。
而這里的難點主要是電子差速以及如何通過傳感器等保證四輪轉速的一致。由于車輛在路面行駛的狀況復雜,在控制算法、技術路線上也較為多樣且復雜。在四電機系統中,四輪差速控制可以有兩種方式實現,一是以汽車左前輪轉速作為標定車速,調節其他三個車輪轉速,四個車輪繞轉向中心同角度旋轉從而實現差速;二是基于前軸整體轉向設計四輪差速控制系統,控制器通過調節四個車輪轂電機的轉速來實現差速,其獨到之處在于當電動汽車轉彎時,整個前軸可繞前軸中心整體旋轉一定的角度。
總體而言,四輪獨立驅動中,僅差速控制車輛的算法就已經足夠復雜,首先要有效獲取四個驅動輪或電機的工作狀態,并需要有極高的精度,對控制模塊的要求較高。
小結
四輪獨立驅動在未來的高端電動汽車上是一種趨勢,但作為可靠性要求較高的應用,在汽車上廣泛應用還需要更多的驗證。
發布評論請先 登錄
相關推薦
電動汽車真的需要三電機甚至四電機嗎?
Kanzi One賦能長城旗下坦克700/400 Hi4-T
實現2.5A驅動電流并提供四個可獨立控制的1/2H橋驅動芯片-SS8844T

禾賽科技獲得福特中國合資品牌新車型平臺項目量產定點
禾賽科技獲得奧迪新車型激光雷達量產項目定點
四維圖新旗下杰發科技AC8025正式量產
如何設計一款四輪智能小車

英力士汽車公司推出2種動力系統選項的四驅車型
長安深藍G318 SUV將于3月18日首發,科技新硬派車型揭曉
請問基于iLLD可以開發量產的ECU嗎?
深藍G318增程式SUV關鍵參數曝光
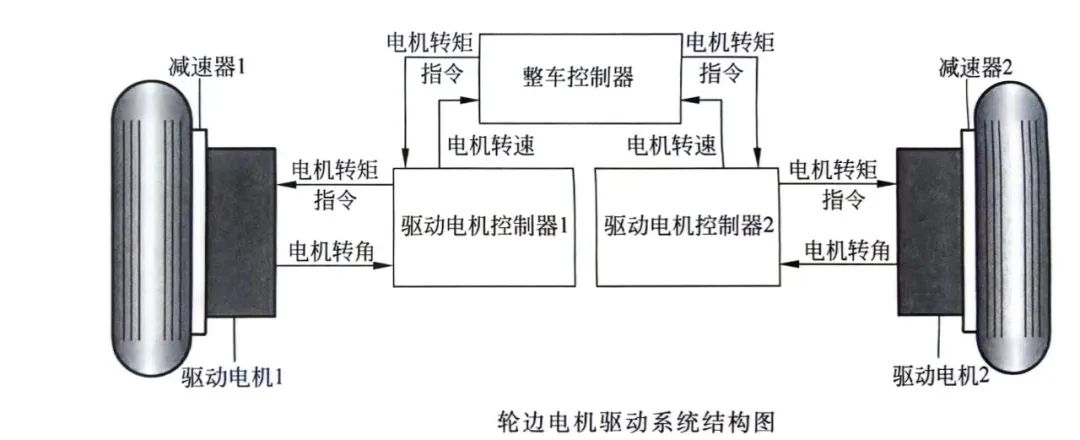
輪邊電機驅動系統的構成及特點





 工商網監
工商網監
評論