") 機(jī)械臂抓取從入門到實(shí)戰(zhàn)課程
機(jī)械臂抓取從入門到實(shí)戰(zhàn)課程
01機(jī)器人抓取介紹目前機(jī)器人作為智能制造的重要組成部分,已經(jīng)廣泛應(yīng)用于各行各業(yè)。但是大部分機(jī)器人都是通過(guò)示教過(guò)程實(shí)現(xiàn)生產(chǎn)制造的,編程簡(jiǎn)單快捷,不需要考慮復(fù)雜的軌跡規(guī)劃,這樣往往只能重復(fù)對(duì)固定位置的物體進(jìn)行搬運(yùn)或抓取,無(wú)法實(shí)現(xiàn)真正的智能化操作。隨著工業(yè)智能化改造的不斷深入,許多企業(yè)進(jìn)行產(chǎn)線升級(jí),逐漸將機(jī)器視覺(jué)技術(shù)引入生產(chǎn)制造過(guò)程中,應(yīng)用于生產(chǎn)線對(duì)物料校準(zhǔn)和定位,將視覺(jué)系統(tǒng)作為機(jī)器人對(duì)外界環(huán)境感知的一種輔助定位系統(tǒng),就像給工業(yè)機(jī)器人裝上了眼睛,采集場(chǎng)景信息,由控制器進(jìn)行處理、判斷,進(jìn)而完成對(duì)應(yīng)的控制指令。
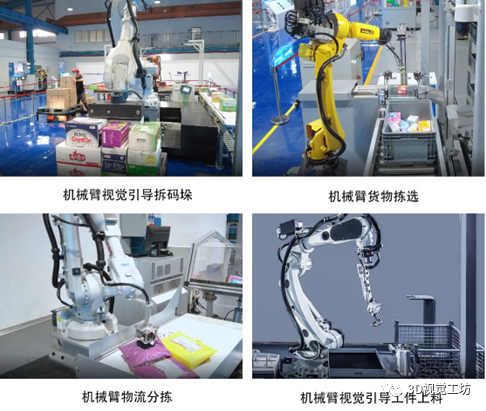
機(jī)器人視覺(jué)抓取的目的是使用一個(gè)機(jī)械手模型(包括二指或多指夾爪,吸盤等),以RGB或RGBD相機(jī)采集的場(chǎng)景圖像為輸入計(jì)算出一個(gè)最優(yōu)的抓取位姿,使機(jī)械手在該位姿下可以穩(wěn)定地抓取模型已知或未知的物體。其中機(jī)器人平面抓取是指限制機(jī)器人垂直桌面抓取,即為RPY角中的Roll和Pitch設(shè)為定值,抓取算法只需預(yù)測(cè)(x, y, z, yaw, width)。其中(x, y)為RGB圖像或者深度圖中的像素點(diǎn)位置,z為深度相機(jī)對(duì)應(yīng)抓取點(diǎn)距離相機(jī)的深度,yaw表示機(jī)械手沿z軸的旋轉(zhuǎn)角,或機(jī)械手閉合方向與圖像水平軸的夾角;width表示機(jī)械手張開(kāi)寬度。相對(duì)于6DOF位姿估計(jì)抓取算法,平面抓取算法使用更簡(jiǎn)單的深度學(xué)習(xí)模型可以優(yōu)化預(yù)測(cè)速度,提高抓取成功率。下列為機(jī)器人抓取任務(wù)的工業(yè)現(xiàn)場(chǎng)圖:
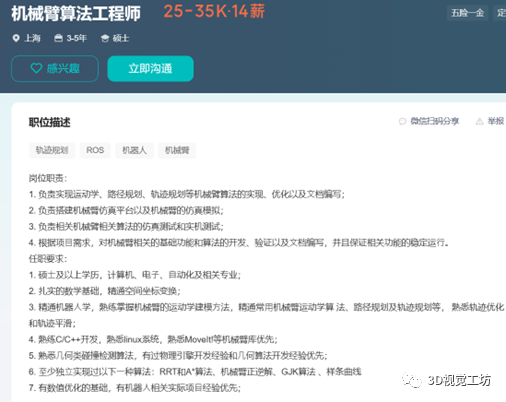
目前,各個(gè)大廠如美的庫(kù)卡、小米、華為、亞馬遜、谷歌等均在大力發(fā)展機(jī)器人結(jié)合視覺(jué)抓取在物流運(yùn)輸、智能制造等領(lǐng)域的應(yīng)用。在《中國(guó)制造2025》和“十三五規(guī)劃”等政策推動(dòng)下,由“中國(guó)制造”到“中國(guó)智造”已是必然趨勢(shì),行業(yè)外部發(fā)展環(huán)境利好,內(nèi)部資本實(shí)力雄厚、薪酬可觀,且不存在中年危機(jī)等互聯(lián)網(wǎng)企業(yè)通病,是目前理想的就業(yè)方向。以下是某招聘網(wǎng)站發(fā)布的招聘需求和薪資待遇:

02如何學(xué)習(xí)
機(jī)器人平面抓取任務(wù)已廣泛應(yīng)用于各行各業(yè),如服務(wù)機(jī)器人,機(jī)器人搬運(yùn)、分揀、上料等。然而由于機(jī)器人抓取任務(wù)不僅包含視覺(jué)算法,也需要熟悉機(jī)器人的建模、運(yùn)動(dòng)學(xué)、軌跡生成、路徑規(guī)劃等原理,知識(shí)點(diǎn)繁多復(fù)雜,因此不論是高校、科研院所或者是企業(yè)都尚未形成完整的知識(shí)體系。對(duì)于想學(xué)習(xí)機(jī)器人抓取的學(xué)員,只能依靠網(wǎng)絡(luò)上零散無(wú)序的知識(shí)片段拼湊學(xué)習(xí),時(shí)間利用率極低。
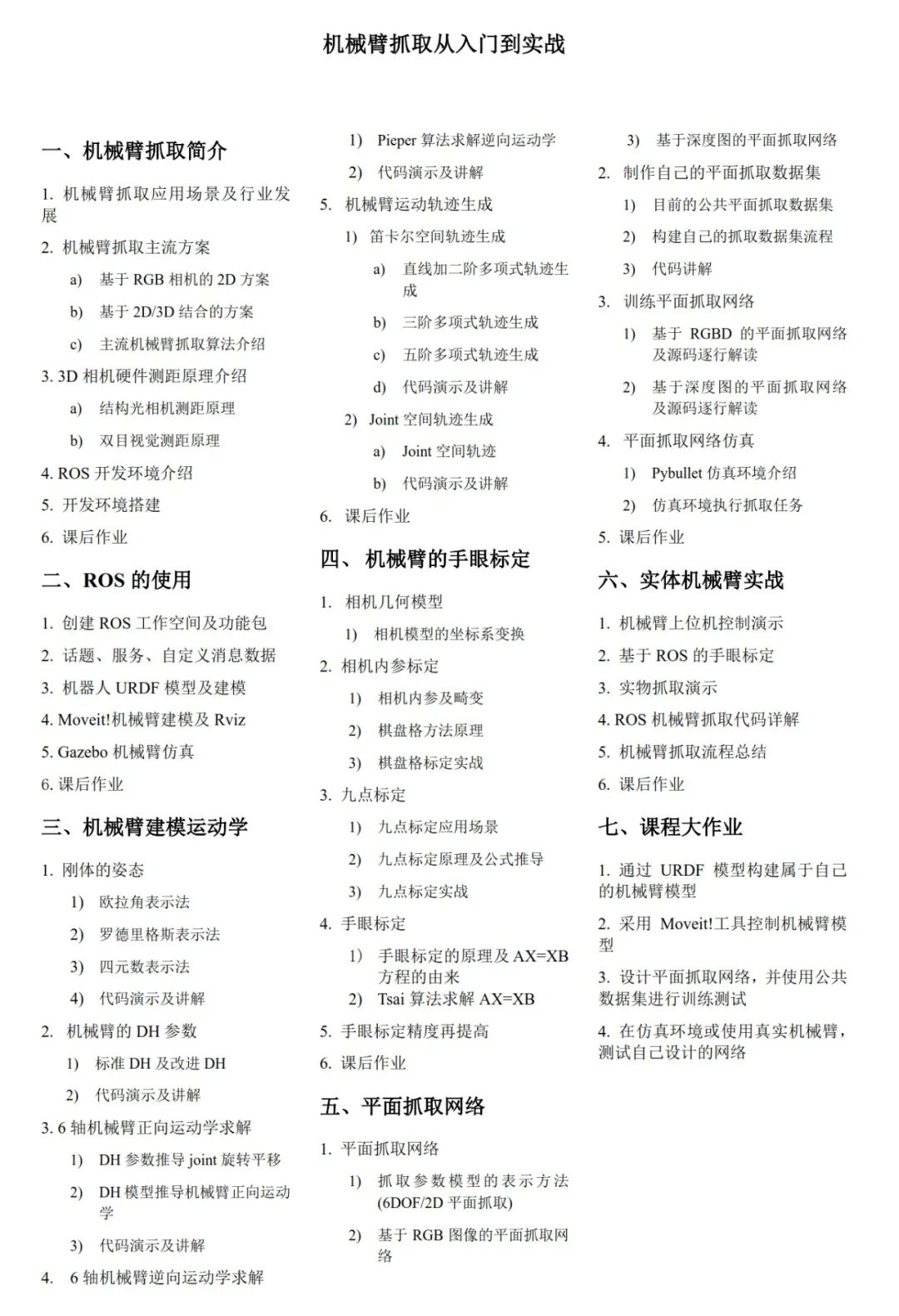
為此,我們推出了機(jī)器人抓取課程,授課老師為某頭部智能制造公司的視覺(jué)算法工程師,具備扎實(shí)的機(jī)器人和視覺(jué)理論知識(shí),擁有豐富的實(shí)戰(zhàn)經(jīng)驗(yàn)。課程將會(huì)在環(huán)境配置,ROS基礎(chǔ),機(jī)器人基礎(chǔ),平面抓取網(wǎng)絡(luò),機(jī)器人抓取實(shí)戰(zhàn)等方面進(jìn)行詳細(xì)展開(kāi)。無(wú)論是理論基礎(chǔ)還是實(shí)踐應(yīng)用,都可以使初學(xué)者或具有一定經(jīng)驗(yàn)的從業(yè)者從中受益,課程大綱如下:
審核編輯 :李倩
-
機(jī)器人視覺(jué)
+關(guān)注
關(guān)注
0文章
48瀏覽量
10021 -
機(jī)械臂
+關(guān)注
關(guān)注
12文章
509瀏覽量
24496
原文標(biāo)題:重磅!機(jī)械臂抓取從入門到實(shí)戰(zhàn)課程(理論+源碼)
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
從工業(yè)到醫(yī)療再到太空機(jī)器人 機(jī)械臂都有什么不同?
什么是相機(jī)標(biāo)定?視覺(jué)機(jī)械臂自主抓取全流程
【全新課程資料】正點(diǎn)原子《ESP32基礎(chǔ)及項(xiàng)目實(shí)戰(zhàn)入門》培訓(xùn)課程資料上線!
【全新課程資料】正點(diǎn)原子《基于GD32 ARM32單片機(jī)項(xiàng)目實(shí)戰(zhàn)入門》培訓(xùn)課程資料上線!
2017威哥Java教程視頻全集——從入門到精通(基礎(chǔ)課程+項(xiàng)目實(shí)戰(zhàn))
【瑞芯微RK1808計(jì)算棒試用申請(qǐng)】機(jī)械臂快速識(shí)別抓取系統(tǒng)
如何去開(kāi)發(fā)一款基于RGB-D相機(jī)與機(jī)械臂的三維重建無(wú)序抓取系統(tǒng)
臂- 手系統(tǒng)主動(dòng)抓取策略及仿真
如何使用深度強(qiáng)化學(xué)習(xí)進(jìn)行機(jī)械臂視覺(jué)抓取控制的優(yōu)化方法概述
從入門到精通-西門子工業(yè)網(wǎng)絡(luò)通信實(shí)戰(zhàn)
基于深度強(qiáng)化學(xué)習(xí)的視覺(jué)反饋機(jī)械臂抓取系統(tǒng)

應(yīng)用案例 | 當(dāng)機(jī)械臂抓取物料時(shí),如何精準(zhǔn)拿捏尺度?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論