 簡單闡述多旋翼飛行器的系統辨識
簡單闡述多旋翼飛行器的系統辨識
“本文主要講多旋翼飛行器的系統辨識,簡單闡述幾個概念。還是從一個有意思的話題說起,就是目前市面上的多旋翼飛控廠家在設計控制系統的時候,都是簡單粗放的調節PID參數嗎?答案肯定不是,至少一些大廠,如DJI等,在設計控制器,包括驗證控制器性能的時候,絕不是簡單調調PID參數、看看時域的波形就結束了。理論上要想量化控制器的優劣設計,少不了對飛行器進行系統辨識,而這方面,基本上很少有廠家會去做。因素有很多,如精細化設計的需求本身、工程師的水平等。”
01、系統辨識到底有什么用?
首先是,飛行器領域的系統辨識到底有什么作用?總結起來就是大致以下幾點: (1)對飛行器本身進行穩定性分析; (2)飛行器的操縱特性分析; (3)飛行仿真(仿真模型構建、物理建模驗證與改進); (4)指導飛行控制算法設計(根軌跡法),基于模型的控制算法設計; (5)控制器性能驗證(帶寬、相位滯后、穩定裕度),定量分析控制算法設計的優劣。
02、系統辨識模型有哪些?
主要分為參數化模型和非參數模型。參數化模型就是傳遞函數(單輸入單輸出)和狀態空間模型(多輸入多輸出),非參數模型就是脈沖響應和頻率響應。 上述兩種有何區別? 首先參數化模型是以非參數模型作為前提的,從中辨識出參數化模型。它需要做很多假設,比如模型階次、運動方程的結構、參數初始值等。從這個意義上來說,實際還是非參數化模型用的多,主要就是頻率響應。它可以迅速的幫我們了解系統,理解一些關鍵問題。
03、頻率響應法的優點?
1. 可利用相干函數來作為辨識精度的指標; 2. 能準確找到系統的時間延遲; 3. 開環頻率響應能確定系統穿越頻率、增益裕度、相角裕度,閉環頻率響應能確定指令的跟蹤性能,包括帶寬等。
04、手動操縱是否可以?
一般來說,都是由飛手進行手動操縱。然而,實際應用中,掃頻取數據也是一個技術活,絕不是飛手簡單左右打打桿就能做好的。 隨便舉幾個例子,如打桿的幅值多大比較好?輸入的幅值太小,那響應的幅值就小,信噪比低,辨識精度下降;輸入的幅值太大,飛行器運動會偏離參考配平狀態很多,這樣線性模型的假設就失效了。數據記錄長度多長?輸入信號的頻率范圍是什么樣?等等。
05、怎么避免手動操縱帶來的誤差?
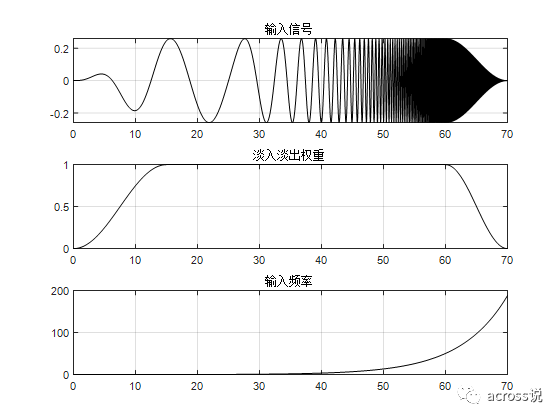
解決方案也簡單,就是設計一種飛行模式,輸入信號由計算機自動生成,這樣飛手操作的影響就小很多。 如何設計掃頻信號?幾個關鍵指標,頻率范圍,輸入幅值,淡入淡出時間,日志記錄時間。頻率范圍要確保對應的頻率響應在模型應用頻率范圍內,多旋翼飛行器為例的話,大概在0.5~188rad/s,即0.08~30Hz。在辨識的時候,開始與結束階段輸入為零,保證穩態;淡入淡出時間設計,保證開始或結束的時候輸入信號過于尖銳。 下面給出一組信號的仿真結果:
日志記錄時間:70s;
頻率范圍:0.08-30Hz;
幅值:0.26rad/s;
淡入時間:15s;
淡出時間:10s;
 ? ?
? ?
06、多旋翼本體模型辨識的特殊性
固定翼本體模型辨識,可以直接無反饋控制飛行器飛行,輸入為舵面,輸出為某通道的角速度,因此可以做理想情況下的無控制增穩系統開環辨識。但是多旋翼比較特殊,無控制增穩系統,沒辦法直接飛行,因此只能是控制增穩系統接入(即閉環)的情況下進行辨識。 閉環實驗的缺點是控制增穩系統會抑制手動操縱的低頻輸入信號,導致信噪比低,進而低頻段的辨識精度下降。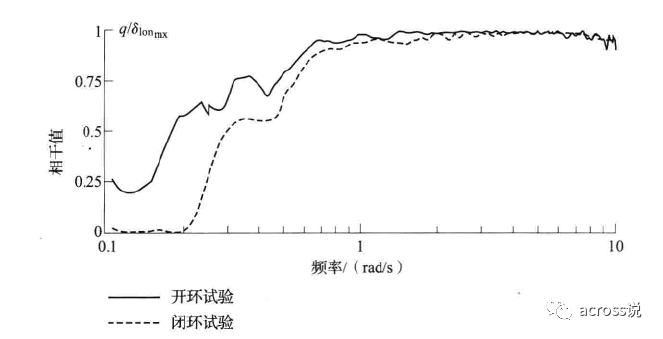 ?
?
還有一個問題是,控制輸入會包含干擾響應,導致本體模型估計出現偏差。 解決辦法是:控制器增益盡量小,掃頻的輸入與干擾輸入的比值合理。
審核編輯:劉清
-
控制器
+關注
關注
112文章
16203瀏覽量
177404 -
PID
+關注
關注
35文章
1471瀏覽量
85289 -
飛行器
+關注
關注
13文章
716瀏覽量
45469
原文標題:淺談多旋翼飛行器系統辨識
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論