 用STM32與PID算法做一個磁懸浮裝置
用STM32與PID算法做一個磁懸浮裝置
今天教大家來做一個磁懸浮玩具
1)磁懸浮的基本原理
磁懸浮有下推式和上拉式兩種基本形式。
所謂下推式,就是控制部分在底座上,懸浮的磁鐵在上面,依靠底座從下往上的排斥磁力推動磁鐵懸浮;而上拉式,是控制部分在上面,懸浮的磁鐵在下面,依靠控制部分從上方的吸引力吸住磁鐵不會落下去。
本文實現的是下推式,僅講解下推式磁懸浮的原理和實現方法。
如下圖,是一個環形磁鐵的磁力線: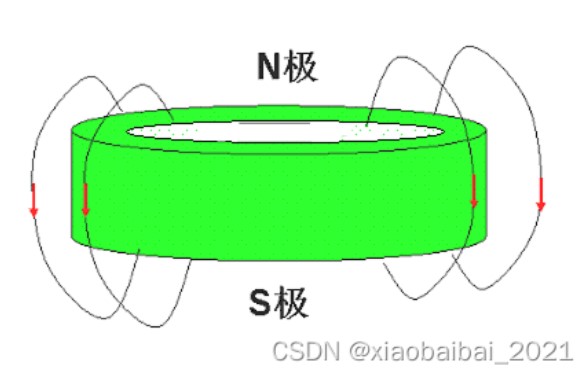
如果在它上方放置另一個小磁鐵,N極向下S極向上,那么它會受到下面的環形磁鐵的斥力。越靠近下方的環形磁鐵,斥力就越大。當距離合適時,斥力與上方磁鐵的重力相等時,就能實現懸浮: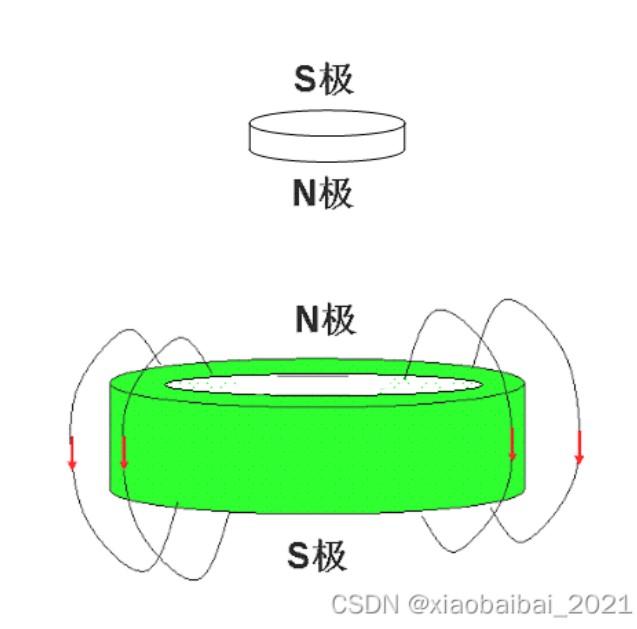
但是,僅僅依靠兩個磁鐵的相互作用是不能保持穩定的,因為兩個磁鐵的斥力只要與重力的方向不在同一直線上,就不能保持平衡,上方的小磁鐵就會向旁邊飛出去。
而下推式磁懸浮的實現方法,就是在上述的系統里,再增加一個控制上方小磁鐵保持在中軸線位置的裝置。這樣,小磁鐵即不能往旁邊移動,垂直方向的重力又和磁鐵斥力相抵消,就 能實現穩定的懸浮了。
具體實現時,如果沒有大環形磁鐵,可以使用一圈小磁鐵代替,效果是一樣,如本文效果圖里用的4個、8個都行,但是一定要排布在對稱位置。
控制小磁鐵位置的裝置,一般由霍爾元件和電磁鐵組成。用兩個霍爾元器件來檢測磁場,兩個霍爾元件安裝在環形磁鐵的中心處,且互相垂直,檢測面都與鉛垂線平行。如果上方的小磁鐵在中軸線上,那么系統的磁力線也是鉛垂線方向的,兩個霍爾元件都無輸出;如果小磁鐵偏離了中軸線,那么系統的磁力線方向會偏離鉛垂線方向,霍爾元件就能檢測出往某個方向偏移了。此時,由MCU采集霍爾元件的輸出,控制電磁鐵,產生一個水平方向相反的磁力,將小磁鐵拉回中軸線上就行了。
由于該系統是一個動態平衡的系統,需要不斷地采集、判斷、調整,最好使用PID控制。
了解了原理,下面就一起實現吧。
2)硬件電路圖及調試
由上述的原理講解,我們的硬件只需要處理好兩件事情就行了:一是采集兩個相互垂直安裝的霍爾元件的輸出,以獲取小磁鐵的偏移位置;二是控制兩組相互垂直的電磁鐵,產生水平的磁力。
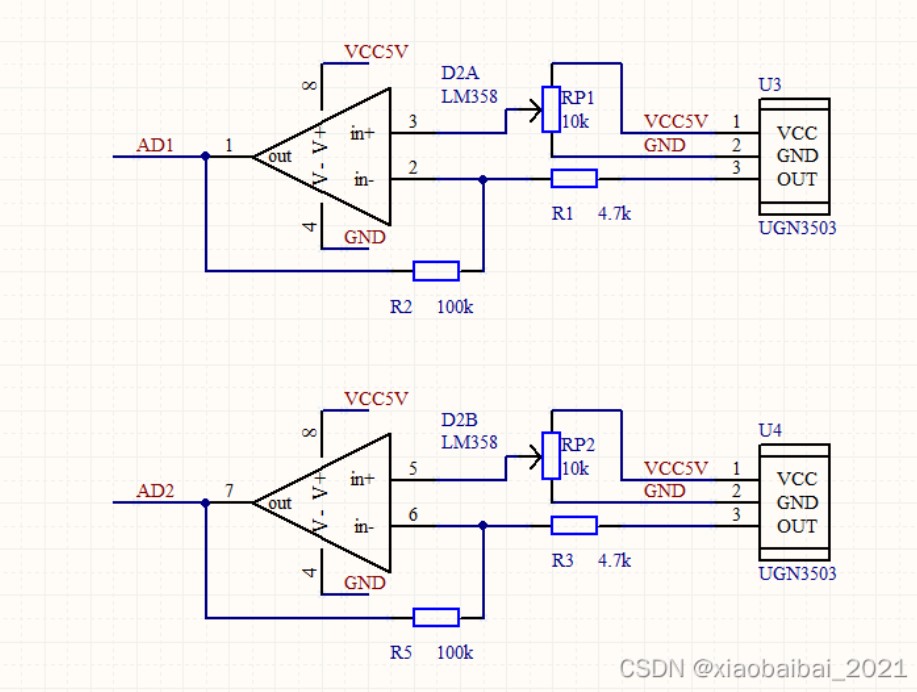
霍爾元件及其信號放大部分,UGN3503是霍爾元器件,電位器提供一個初始的零位電壓,霍爾的輸出信號通過反向放大后,輸出到STM32的AD口采集:
電磁鐵驅動部分,使用L293D電機驅動芯片來驅動電磁鐵,L293D由STM32輸出的PWM波來驅動: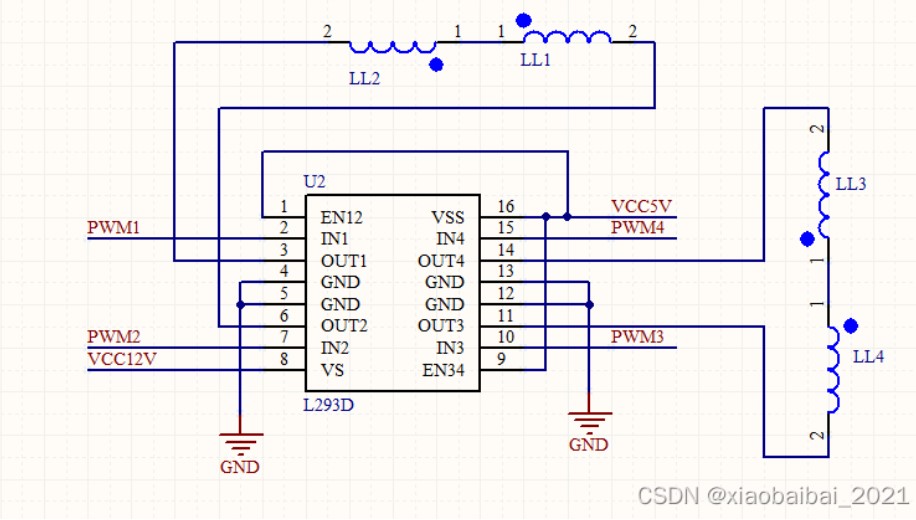
電源部分,驅動電磁鐵用9~12V的電壓比較合適,霍爾供電用5V: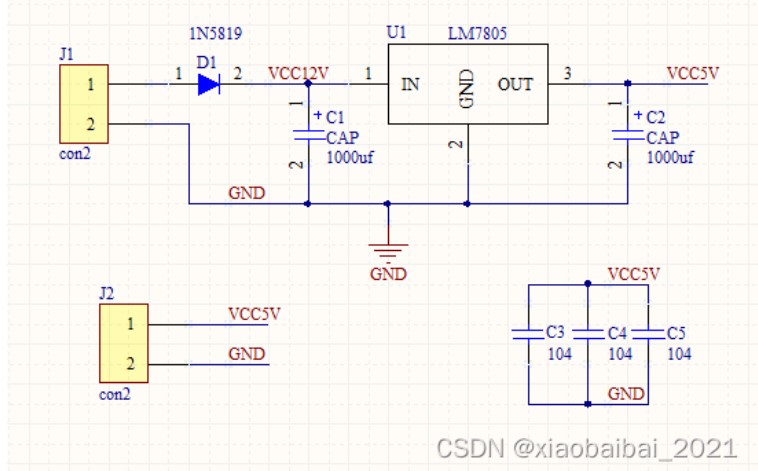
因為小白白在DIY的時候STM32是外接的最小系統,所以原理圖里沒畫STM32,只留了幾個接點。
注意布局時,霍爾元件和電磁鐵的放置位置,有特殊要求。最終的PCB圖如下: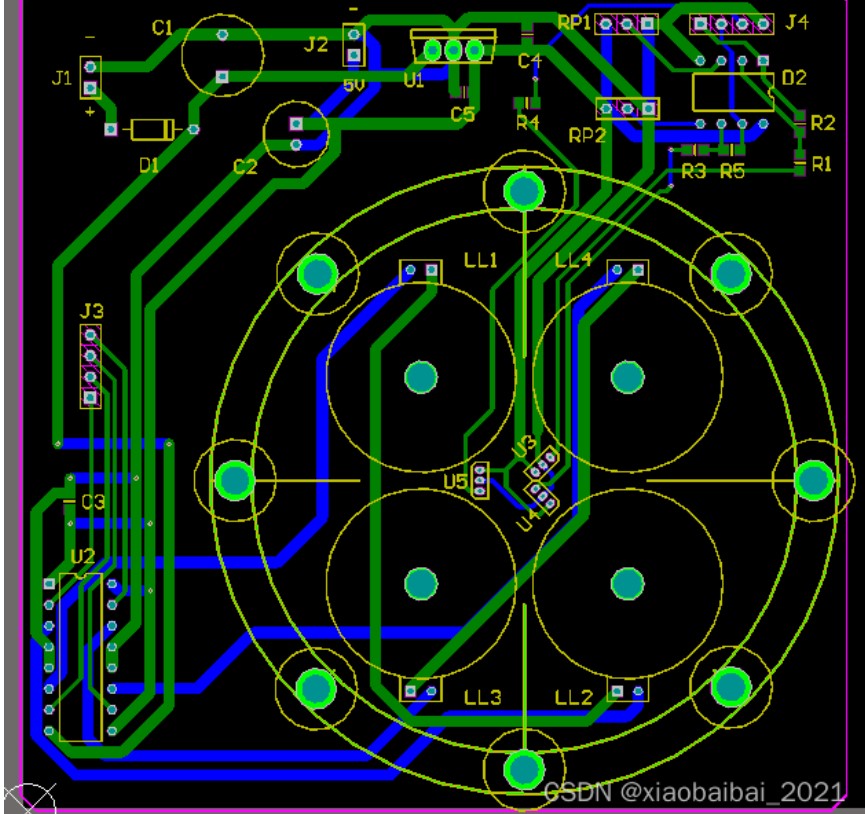
U3和U4是兩個檢測磁鐵位置的霍爾元件,需要安裝在環形磁鐵中心附近,并且互相垂直;而且霍爾的平面要在相對角電磁鐵的連線上。
注意兩個霍爾U3和U4的位置:(U5也是個霍爾,本來是預留來檢測是否有磁鐵放在上面的,暫時沒有用上)
LL1~LL4是四個電磁鐵,LL1和LL2一組,LL3和LL4一組,安裝時,同組的需要對角放置;而且要注意安裝時同名端相連,通電后,同組的兩個電磁鐵磁力線能相互連接產生閉合磁力線(也就是一個上方為N極時同組另一個上方為S極)。這樣才能保證同組的電磁鐵產生的磁力在水平方向是相同的。
在電路圖焊接完成后,與STM32F103C8T6最小系統相連,霍爾的輸出AD1、AD2連接到STM32的PA0和PA1;PWM1~4依次連接到STM32的PA15、PB4、PB3、PB5。其他供電部分的連接就不說了。
安裝好環形磁鐵,上電后,在空載狀態下調整U3、U4連接的電位器,使得AD1和AD2都在1.65V左右(也即AD采集時3.3V的中間值)。
到這里,硬件的設計工作就基本完成了。
3)軟件編程實現
軟件的實現也是大致分為兩大功能:一是通過AD采集,獲取磁鐵再水平方向X、Y軸的位置;二是通過兩個方向位置偏移的大小來計算驅動兩個方向電磁鐵的PWM輸出值,這個計算過程使用了PID算法。
程序架構是:在主循環里不斷地采集霍爾元件的電壓,也就是AD1、AD2的值;在中斷里計算PID控制算法,設置PWM的輸出。
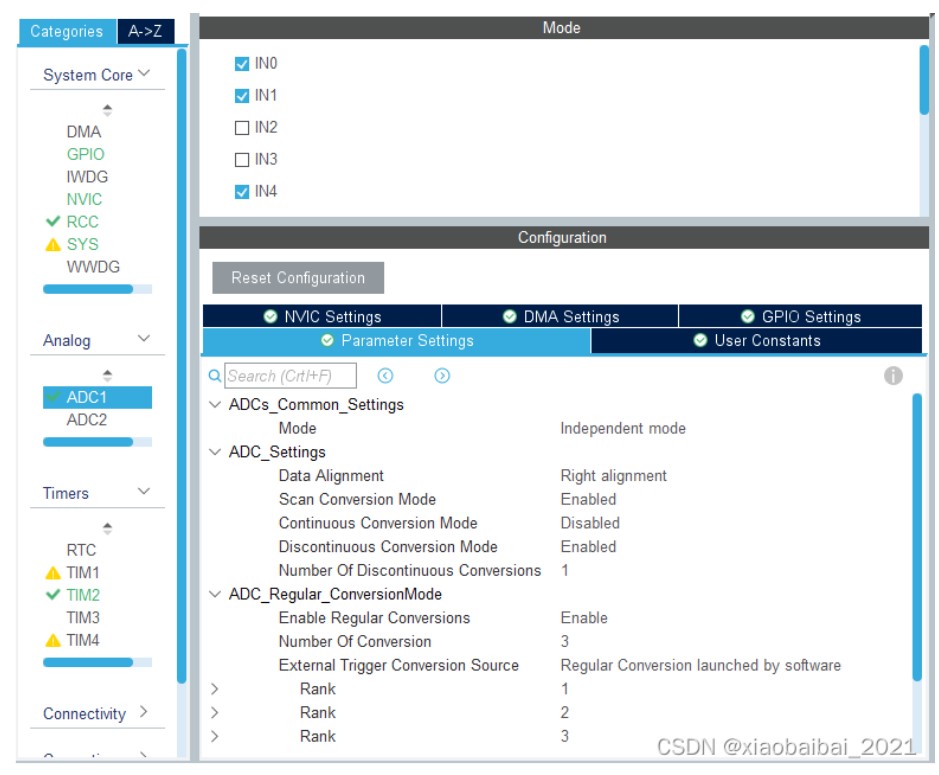
首先在cubemx里配置ADC,打開AD0、AD1和AD4(實際只用了AD0和AD1,AD4是預留的,采集了但是沒有用于計算),分別配置到圖中的rank1、rank2、rank3下:
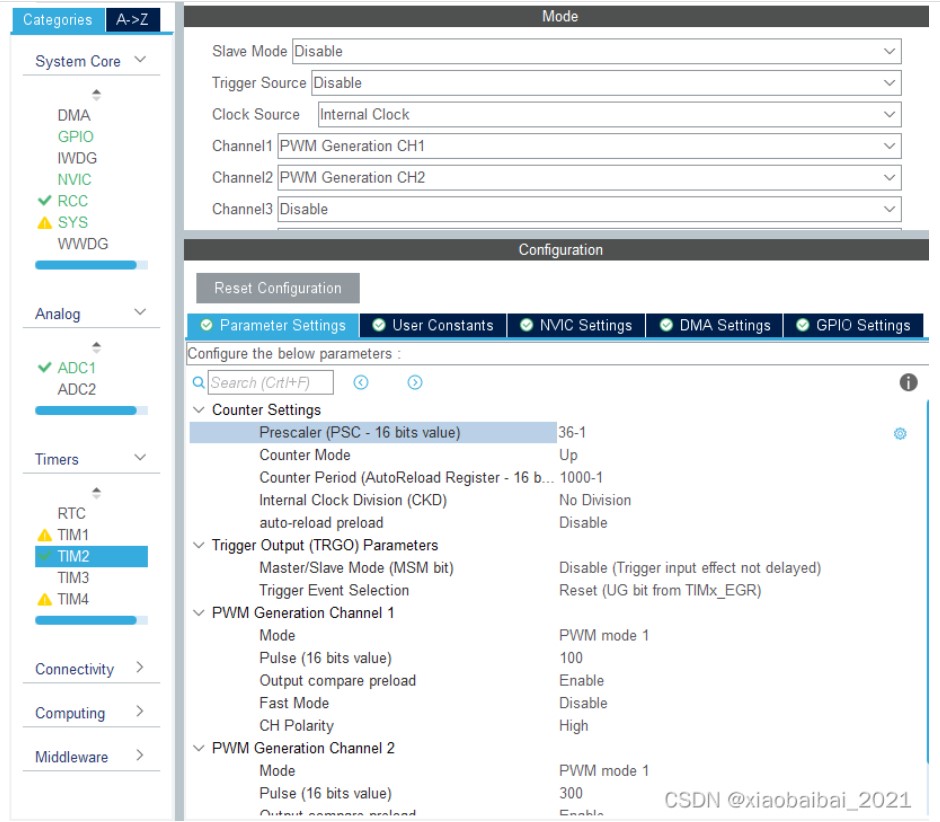
使能定時器TIM2中斷:
到這里,cubemx里的硬件主要配置就完成了。接下來可以生成keil工程,編寫軟件代碼。
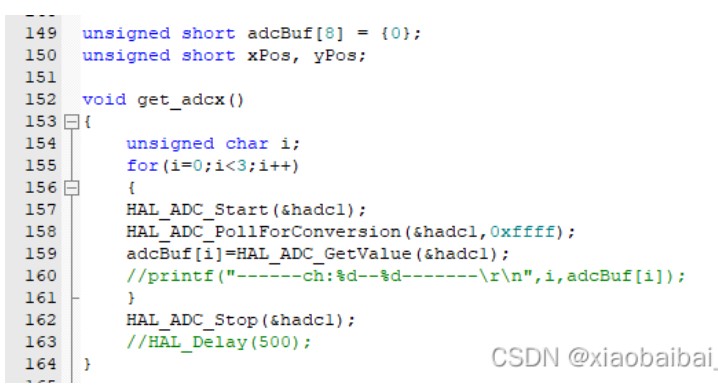
在keil工程里,adc部分,使用如下函數進行AD采集,采集了三個通道,即AD0、AD1、AD4:
然后進行滑動平均濾波,這里最終只保留了AD0和AD1兩路,10bit的精度,存放到了xPos和yPos中,作為兩個方向的位置值。
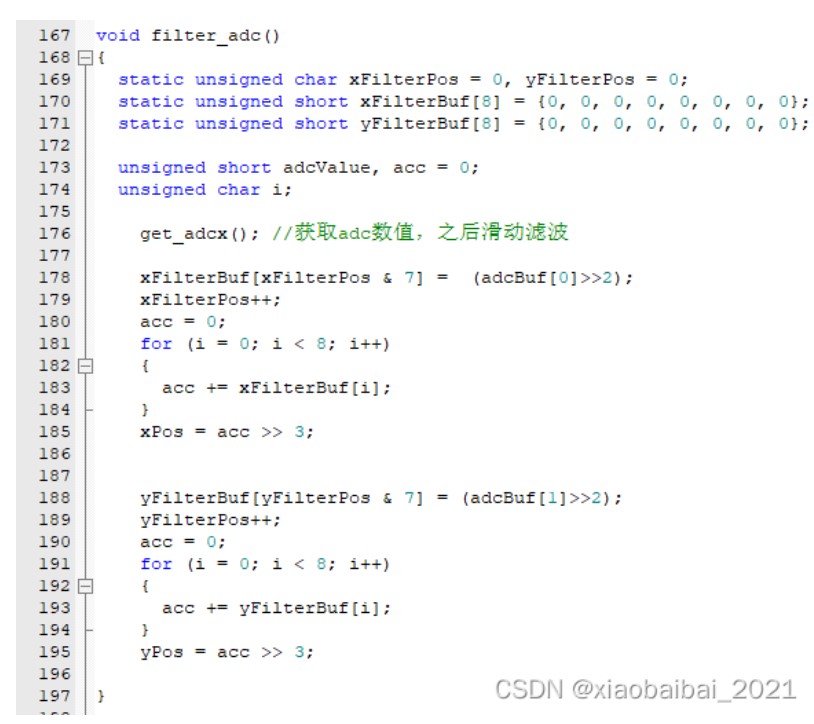
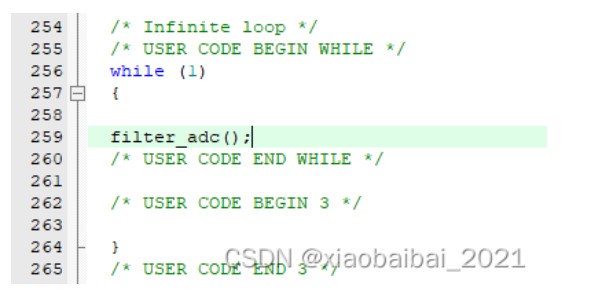
filter_adc()函數需要放在主循環中循環調用,不斷更新位置值:
PID部分主要的實現代碼如下: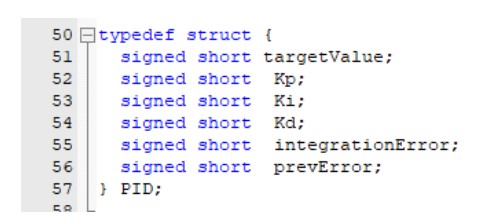
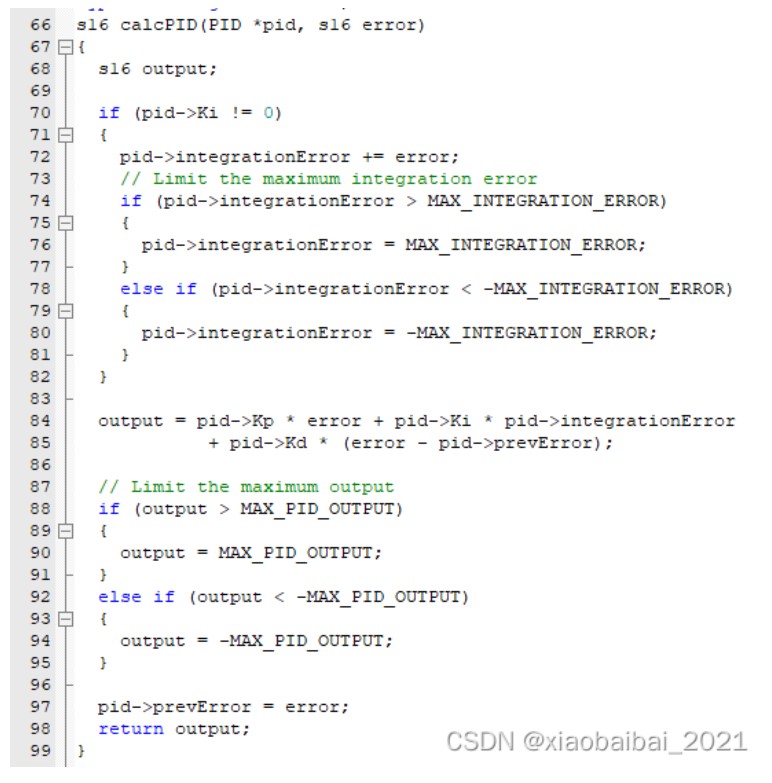
注意這里PID實現時對積分項的處理,當誤差的累加值非常大時(也即積分項很大時)不會再累加誤差項,而是限制到一個最大值MAX_INTEGRATION_ERROR,這是一種避免積分飽和的方法。(關于PID的積分飽和,可以參見小白白以前發的文章《PID控制的深入探討(位置式PID、增量式PID、PID的積分飽和)》)
接下來,講一下如何設置PWM輸出值,以及怎么控制電磁鐵磁場的正負向。
由于我們使用了L293D芯片來驅動電磁鐵,以LL1和LL2這一路為例,當PWM2設置為低電平,則PWM1輸出為高時就能驅動電磁鐵;當PWM2設置為高電平,則PWM1輸出為低時,電流與前述狀態相反,就能反向驅動電磁鐵。如下圖所示:
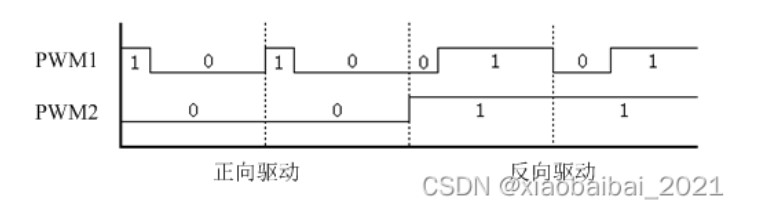
同時,我們只需要改變PWM1的脈寬,就能實現電磁鐵的磁場強度控制。
另一路LL3和LL4電磁鐵也是一樣的原理,可以通過PWM3控制磁場強度,通過PWM4來控制磁場方向。
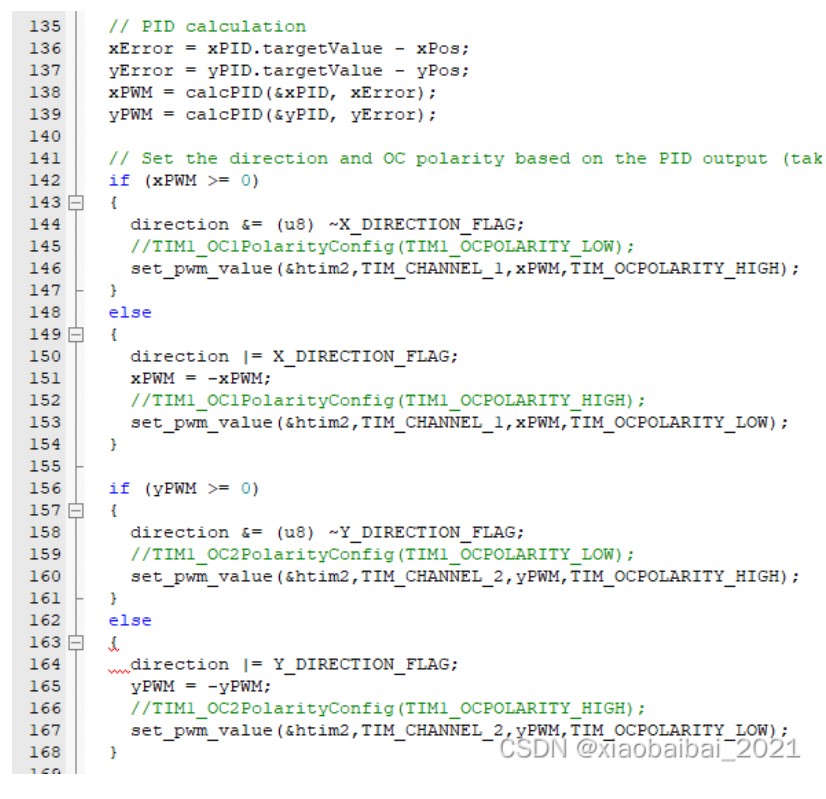
這部分的實現代碼如下,其中PWM1和PWM3的輸出值(也就是代碼中的xPWM和yPWM),是先通過調用PID計算函數得出值,再依據正負向設置到定時器的PWM輸出的,整個函數放在定時器中斷中調用。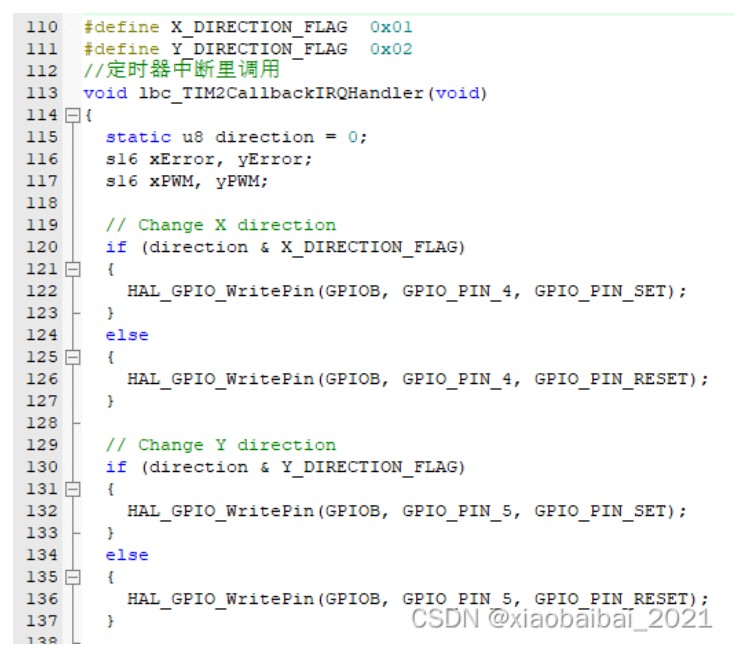
最后提醒一下,PID的參數值,是需要調整的,這些值與磁鐵大小、定時器的控制周期長短都是相關的,本文中的取值如下:
#define P_value 4
#define I_value 1
#define D_value 30
4)一些補充內容
在調試時,可以先拿住小磁鐵從上往下移動,當感覺重力被磁力抵消時,再向水平的X、Y方向移動,如果感覺有水平的阻力,那么就成功了一大半了,后面只需要微調參數即可。要注意保護強磁鐵,如果兩個磁鐵不加保護直接吸到一起很可能會被撞碎。
到這里,磁懸浮最基本的功能就做好了,但是還有很多可以優化的地方。
比如現在計算周期用的是2KHz,正好在人的聽覺范圍內,這在使用時,電磁鐵可能會產生一些噪音,可以考慮把控制周期改到20KHz以上,但是要注意PID的參數需要調整。
再比如,多利用一個霍爾元件,可以增加檢測載荷的功能,如果沒有載荷,可以關閉PWM省電。
審核編輯:劉清
-
PWM
+關注
關注
114文章
5153瀏覽量
213448 -
STM32
+關注
關注
2266文章
10876瀏覽量
354925 -
PID算法
+關注
關注
2文章
171瀏覽量
24272 -
定時器
+關注
關注
23文章
3241瀏覽量
114514 -
磁懸浮
+關注
關注
10文章
99瀏覽量
19887
原文標題:【DIY】手把手教你:用STM32與PID算法,做一個磁懸浮裝置
文章出處:【微信號:電子工程師筆記,微信公眾號:電子工程師筆記】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

誰能教一下磁懸浮玩具的...
磁懸浮列車
磁懸浮用線性霍爾元件 磁懸浮霍爾應用
STM32下推式磁懸浮裝置介紹
Stm32f103上拉式磁懸浮
如何實現常導和超導磁懸浮演示試驗裝置的控制論文資料概述

DIY一個電磁懸浮裝置





 工商網監
工商網監
評論