 使用ADIS16209傾角儀進行傾斜測量的精度和可重復性
使用ADIS16209傾角儀進行傾斜測量的精度和可重復性
Ian Beavers
從理論上講,這種技術可以通過使用多個傳感器創建平均效應來幫助提高測斜儀測量的精度性能。潛在好處的原因是可以平均多個傳感器之間的不相關誤差源和隨機噪聲。這降低了聚合傳感器數據的整體本底噪聲,并允許目標聚合信號相對于噪聲的功率更大。雖然MEMS設計團隊推出了世界一流的傳感器,但系統工程師將繼續尋找最后一塊增量性能。但是,警告是有序的,因為這不是絕對的情況,并且必須考慮系統設計的某些領域。
兩個測斜儀傳感器的輸出可以使用微控制器內的后端數字處理進行求和和平均。測斜儀的主要標題規格是傳感器傾斜到水平面的相對精度。通過組合信號輸出,噪聲密度降低,類似于2×過采樣條件。同樣,將四個測斜儀的信號輸出組合并對其進行平均可以產生 4× 的改進方案。在理想情況下,使用四個平行傾角儀理論上可以將0.1°的精度降低到0.025°。
測斜儀之間微妙的內部非線性失配將表現出獨特的傳遞曲線。雖然某些非線性由于架構而相似,但其他非線性由于部件之間的差異而有所不同。這些將表現為整體噪聲源以及一般隨機傳感器噪聲。我們可以將這些歸為一類,稱為噪聲。一般來說,噪聲主要與彼此不相關。使用多傳感器系統方法的主要好處是平均這種白色隨機噪聲。相反,當相位和頻率相關的不需要的信號相加時,它們的幅度將相加,對并行傳感器方法沒有任何好處。
當兩個不相關的信號(如白噪聲)相加時,它們在數學上組合為和方根(RSS)。這導致幅度增加一倍

對于兩個相等的振幅。
如果Vnoise_rms = 一個傳感器輸入端的噪聲,則兩個通道上的平均噪聲為:

通過添加相同相關信號的兩個相同實例并求平均值,功率將幾乎相同(2×相同信號的加法除以2),隨機噪聲將降低信號功率的一半。這會使整體平均信噪比(SNR)的3 dB信號功率理想增加。任何相互排斥的非線性或噪聲僅受其中一個并行傳感器的影響,而另一個傳感器不會呈現給另一個傳感器,這將降低部分全部優勢。
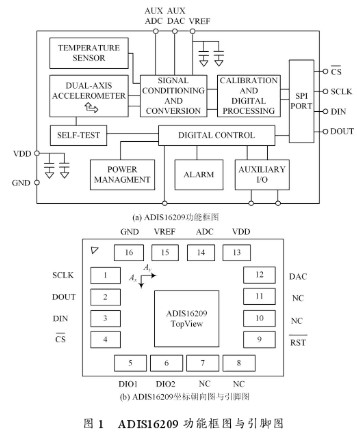
然而,并行傳感器系統設計有幾個細節可能會阻止精度降低2×或4×的全部好處。首先,測斜儀需要受到設備比較軸上相同信號的同等影響。印刷電路板上的空間差異可能會通過每個測斜儀產生不同的觀察結果。由于系統級影響,例如PCB厚度變化和焊接量公差,可能存在獨特的偏移。其次,傳感器之間的平行軸對齊應匹配。整個電路板裝配中的標準方差將具有需要考慮的放置和θ公差。最后,零件間軸對準誤差和非線性不匹配也會影響最佳設計和裝配。該指標確定 x 軸和 y 軸彼此 90° 的垂直程度。傳感器的數據表概述了這些規格。

圖1.對于ADIS16209等雙軸傾角計,x軸和y軸對準的相對放置角精度將影響多傳感器并行平均系統的全部優勢。對于三軸加速度計系統,平行設備相對于 x/y 平面的平坦度或傾斜度將影響多個傳感器之間的 z 軸對齊。
在系統調試時,任何已知的裝配差異都應進行水平校準,以實現最大的并行效益。例如,測得的偏移偏置誤差可以歸零,并在測斜儀上調整零點以參考已知位置。ADIS16209提供自動零點選項,作為克服這些失調因素的方法。
審核編輯:郭婷
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752053 -
pcb
+關注
關注
4317文章
23010瀏覽量
396353 -
mems
+關注
關注
129文章
3899瀏覽量
190360
發布評論請先 登錄
相關推薦
ADI高精度易使用的傾斜傳感器ADIS16209
ADI公司高精度易使用的傾斜傳感器
ADI超小型高精度雙軸傾斜計傳感器
ADIS16209的功能特性與實現傾角測量系統的設計
ADIS16209 高精度、雙軸數字傾角計和加速度計
EVADIIS16209 ADIS16209/PCB分線板






 工商網監
工商網監
評論